グラスプレス・マニピュレーションの解析と計画
新井教授,横浜国立大学 前田講師
物体を把持せずに,押す・転がすなどして操るグラスプレス・マニピュレーション(Fig. 1)は,少ない力で物体を操作できること,把持が不可能な状態でも操作可能であることから,ロボットに人間のような器用な操りを実現させる上で重要である.ロボットの動きとの対応が自明ではないため,計画には障害物回避だけでなく力学の考慮が必要となる.また,操作が不可逆(押せても引けない,など)な場合があることも,計画を困難にしている.
当研究室では,この問題を扱うために必要な,グラスプレス・マニピュレーションの力学解析手法と計画アルゴリズムについて研究を行っている.力学解析としては,操作の確実性の定量的評価や過大な内力の発生可能性を判定する手法を提案している.動作計画については,2本指による持ち替えを含むマニピュレーションの計画を扱い,操作の確実性を考慮に入れた作業手順の生成を実現した(Fig. 3).Probabilistic Roadmapsなどの手法を参考に,コンフィギュレーション空間を適応的にサンプリングすることで,計画時間を高速化している.計画されたマニピュレーションを多指ハンドで実行した例をFig. 4に示す.
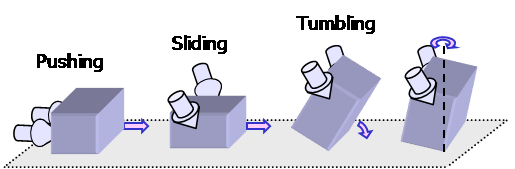
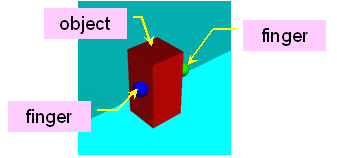
Fig 1: Graspless Manipulation
Fig 2: Model of Graspless Manipulation

Fig 3: Planned Tumbling Operation with Regrasping

Fig 4: Execution of Planned Tumbling Operation by Multi-Fingered Hand
Keywords: Manipulation Planning, Graspless Manipulation
References
1) Yusuke MAEDA and Tamio ARAI: “A Quantitative Stability Measure for Graspless Manipulation,” Proc. of 2002 IEEE Int. Conf. on Robotics and Automation, 2002.
2) 前田 雄介,新井 民夫: “グラスプレス・マニピュレーションのためのロボット指の動作計画”,第8回ロボティクスシンポジア予稿集,pp.391-396,2003.
3) L. E. Kavraki et al: “Probabilistic Roadmaps for Path Planning in High-Dimensional Configuration Spaces,” IEEE Trans. on Robotics and Automation, vol.12, No.4, pp.566〜580, August 1996.