人間スキルの分析
新井教授,電気通信大学 加藤龍助教
車や航空機などの動的な複雑さを有する制御対象を制御するには,操作する人に技能が求められる.この人の技能は制御スキルと動作スキルという2つの側面をもつ.制御スキルとは,ある作業を実行するための適切な動作を選択する人の意志決定能力と考えられる.
また動作スキルとは,作業動作を熟知した上でその作業を行うときの運動能力である.
制御スキルと動作スキルの抽出・継承に関する研究は,非常に多くの研究が存在するが,対象とするスキルはどちらか一方である.
そこで,本研究では,熟練者の技能(制御・動作スキル)を抽出し,初心者へ技能の継承を行う方法論の構築を目的とする.まず,制御スキルの抽出・継承を行うために,ボールをゴールにシュートする動力学シミュレータを構築し,そのときの人の制御履歴(シュート角やシュート力など)を記録する.その結果,熟練者の最適な制御戦略の抽出が可能となりこれを初心者へ提示(継承)することでパフォーマンスが向上することを確認した.
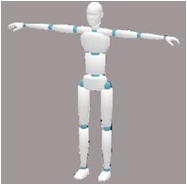
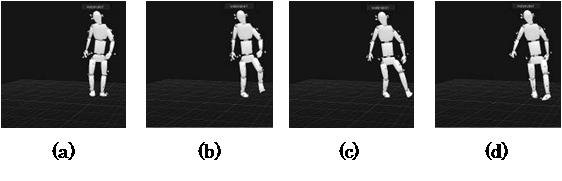
次に,人の動作スキルを抽出するため,前述と同様なタスクを人が実環境で行う際の動作をモーション・キャプチャで記録した.この時,熟練者の動作を人体運動学シミュレータにより,初心者へ一連の動きとして提示(継承)する.提示する一連動作は,複数人が実際に行った動作を有限個に分割し,分割動作ごとにパフォーマンスの高い動作を有する人の結果を統合する.その結果,抽出された制御スキルと抽出・統合された動作スキルの両方を初心者に継承する(提示する)ことにより,パフォーマンスの更なる向上を確認した.
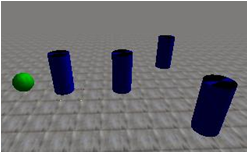
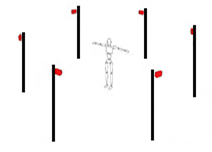
Fig 2: Motion Capture Equipment
Keywords: Human Skill Transfer, Motion Tracking, Kinematic Simulator of Human Body
References
1) Feng Duan, Jeffrey Too Chuan Tan, Ye Zhang, Kei Watanabe, Nuttapol Pongthanya, Masao Sugi, Hiroshi Yokoi, Tamio Arai: “Analyze Assembly Skills using a Motion Simulator,” Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics, pp. 1428~1433, 2007.
2) Feng Duan, Masahiro Morioka, Jeffrey Too Chuan Tan, Ye Zhang, Kei Watanabe, Nuttapol Pongthanya, Masao Sugi, Hiroshi Yokoi, Ryou Nihei, Shinsuke Sakakibara, Tamio Arai: “Multimedia based Assembly Supporting System for Cell Production,” The 41st CIRP Conference on Manufacturing Systems, 2008.