Developmental Cognitive Machines Laboratory
Research Introduction
- Summary
- Man-Machine Mutual Adaptation
- Interference Driven Mechanism enhance the performance of Prosthetic Hand
- Autonomous Machine Learning Method Development
- Evolutionary Robotics
- High Speed SMA Actuator Development
- Power Assist Device Development
- Biofeedback using Functional Electrical Stimulation
Summary
Our research, already involve in the age of fused technologies, has begun to advance into new areas including man, medicine and welfare. The relationship between man-machine reducing the gap between the human being and the machines. The 21st century became an age where mechanical systems and human society lives together, therefore, they should improve eachother.
Against this background, we face the challenge on how to produce a intelligent system that provides practical solutions to the new society. The purpose of this field of study is to develop better machines that are not cold and rigid, but flexible and adaptable, easier to use.
For that purpose, the machines should learn and adapt to their environment, evolve by competition, imitating the way living beings acknogledge their environment and react accordingly taking the best action. We have to develop machines that evolve ltogether with ourselves.
Development of Multi-DOF High Torque JointsLight Weight Robot Hand with Twisting Spring Wire Drive System
This research aims to the development of an externally powered myoelectric (EMG) controlled robot hand fit for daily life activities. The myoelectric upper limb prosthesis is a function recovery device for the hand, which demands lightweight, high torque, many degrees of freedom, and viscoelasticity. The hand uses twisting spring wire drive system for drive system, and two wires in parallel configuration for the interference driven joint mechanisms for articulated mechanism.
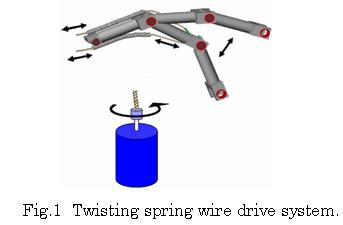
1. Twisting Spring Wire Drive System Proposition technique generates movement by twisting a wire by the motor loaded outside the hand(Fig.1). The motors loaded outside the hand, so it’s possible to make the hand light. And the wire has the nature of spring by twisting double wires, so this can expect the realization of viscoelasticity actuator.
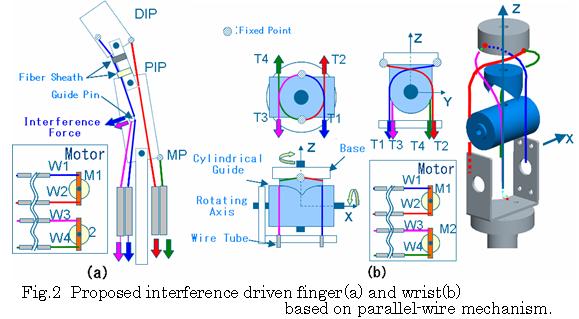
2. joint mechanisms The hand uses the wire driven mechanism at the fingers (Fig.2(a)). imitating the human hand structure. The wire W1 passes through the wire guide that corresponds to the fiber sheath, so the wire W1 can curl not only the DIP joint and PIP joint but also the MP joint. This mechanism allows us to provide MP joint with a high grip power. And, we developed an interference drive joint mechanism at the wrist joint and the thumb MP joint. Fig.2(b) shows the mechanism developed in our laboratory with oil less bearing for the rotating axis forming a guide for the acuators wires, resulting in high torque.
Mutual Adaptation among Human and Machines
In this study we estimate the motion intention using the motion dynamics information included in bio-signals. However, there are several problems when using bio-signals: high nonlinearity, individual variation and non-stationary. In order to solve these problems, we have proposed control methods for a multi-D.O.F prosthetic hand using adaptive learning. These methods can recognize many hand motion patterns using electromyographic signals (EMG). Also we investigate adaptive human action and clarify the mutual adaptation among human and machines.
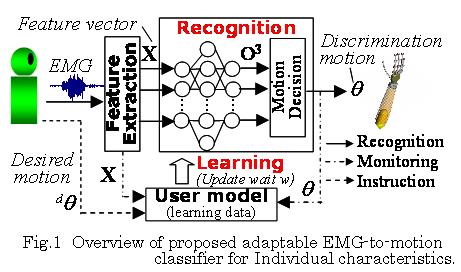
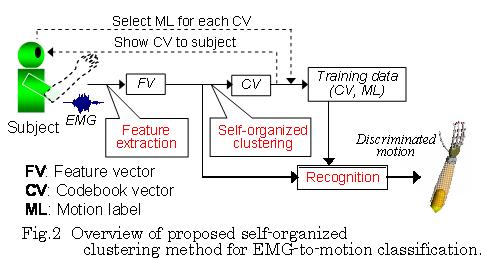
Adaptable Control for Individual Characteristics: It is an effective method to acquire the mapping between EMG and hand motion pattern using machine learning. This method is called “Adaptable control for individual characteristics”. We propose two kinds of methods for pattern identification. First, we analyze the human adaptation process using the self organization clustering, and propose the adaptive learning method that can maintain high performance pattern identification despite EMG’s temporal changes (Fig.1). On the other hand, to identify motion using EMG, generally we measure EMG and instruct user’s desired motion to the system directly, and training data is generated. But it’s difficult to identify an exact motion with this method when the number of motions is increased, because the feature space of each motion’s training data will be overlapped. Therefore, we propose the method that generates training data from EMG autonomously using self-organized clustering to solve that problem (Fig.2).
Brain function analysis for investigating human adaptation process to EMG prosthetic hand: We analyzed the human adaptation process to EMG controlled prosthetic hand using f-MRI. As results, it is clear that amputee’s activation of primary motor area (M1) and primary somatosensory area (S1) were widely growth after sufficient training. This fact means that“the more strongly subjects recognize that the motions of prosthetic hand are motions of their own hand, the more strongly the activation of M1 and S1 is”.
Brain Neural Functional Analysis for the Evaluation of an EMG Controlled Prosthetic Hand
In this study we use functional magnetic resonance imaging (fMRI) and functional near-infrared spectroscopy to measure the changes in the brain when using the individually adaptive myoelectrically (EMG) controlled prosthetic hand developed at our laboratory. Our purpose is to develop a prosthetic hand that provides a feeling close to a natural hand. In order to do so, we look for the differences in the brain activation between healthy and amputated people, to unfold the mechanisms that link the activated area in the brain with their corresponding function.
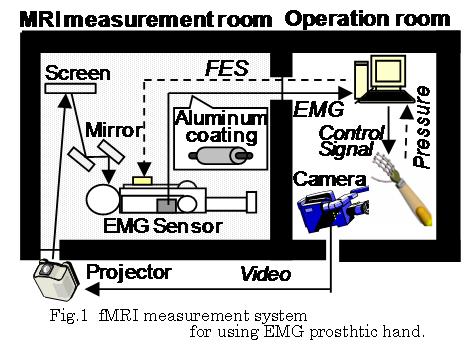
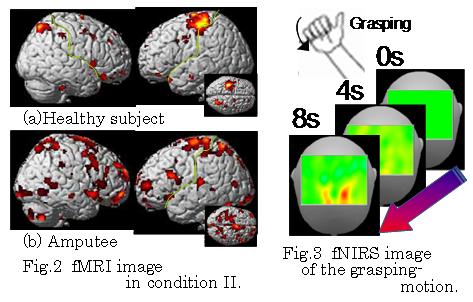
Brain function analysis using fMRI: fMRI is a non-invasive method that measures the haemodynamic response related to neural activity in the brain due to changes in blood flow in a particular area. In order to measure the effects of the prosthetic hand use, we used the experimental setup (fig. 1.) with the electrostatic shielding of the cables and the use of a projector to transmit the prosthetic hand states inside the fMRI room. Figure 2 shows brain activation resulting from a cylinder grasping task with the following conditions:
1. With closed eyes/ right forearm stump for emg control signals without stimulation
2. Open eyes/ right forearm stump for emg control signals with stimulation in the upper left arm
The results shows that for condition one there is activation in the motor cortex (M1) there is no activation on the somatosensory area (S1). Whether, for the second condition, there is activation on both motor (M1) and somatosensory area (S1).This activation is present even if the stimulation is made on the right arm, making us think of a illusion of “ownership” developed while using the robot hand to grab an object while receiving tactile feedback (electrical stimulation).
Brain function analysis using fNIRS: fNIRS is a non-invasive method that measure changes in the concentration of oxy- and deoxy-haemoglobin (Hb) as well as the changes in the redox state of cytochrome-c-oxidase (Cyt-Ox). Though the spatial resolutions are inferior to fMRI, the time resolution is much higher. Our purpose is to develop a dynamical evaluation with normal like operation feeling Brain Machine Interface (BMI) using these two methods.
Walking Assist System of a Leg-Paralysis Person
Introduction - Gerontology becomes significant research in recent rapidly-aging society for the purpose of supporting elderly people on life self-reliance. The robotics field contributes to the research issue developing assistive machines for elderly persons and paralyzed patients.
In our research, we mainly focus on walking-assistive systems for impaired people such as muscle-weaken and hemiplegics persons. On the basis of the analytical results, we develop three assisting devices for walking improvement: stimulator using somatic reflex, functional electric stimulation, and power assist machine.
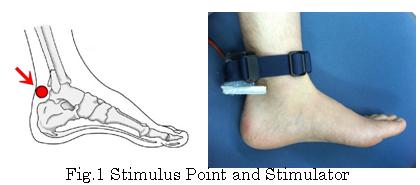
Stimulator Using Somatic Reflex - Some leg paralyzed patient has special somatic reflex which is the result of nerve reorganization. We built a device that can stimulate this reflex for walking support (fig.1).
Functional Electric Stimulation is a method to activate paralyzed leg muscles with electric stimulation. FES has an advantage to use the person’s own muscular system, therefore, it is not necessary to build an external actuation system.
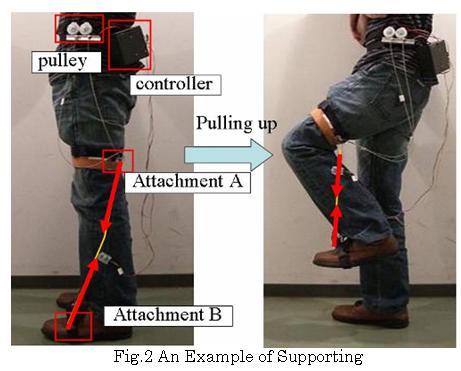
Modular Walking-Assist Devise This device is a modular design that consists of a RC servomotor, a wire, and a tension sensor and actuates joints by reeling wire (fig.2). The advantage of wire driven mechanism is the flexibility to attach it in any place on the user's body. Moreover, cooperated actuation of those devices should support the problematic muscles of the various patients.
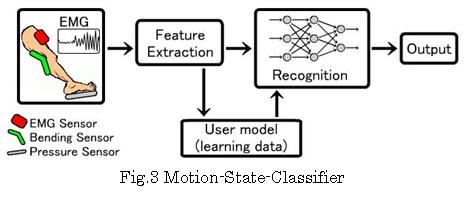
Motion-State-Classifier - We measure walking state of a leg hemi-paretic person with surface electromyographic (EMG) sensors, angular sensors, acceleration sensors, and ground reaction force sensors. We propose the feedback system which is enable to control walking-assist device (fig.3).
Quantification of muscle fatigue using Electromyography (EMG) signals
The development of assistive apparatus which supports degeneration of physical activity has gain popularity in recent years. With help of the assistive apparatus, such as power-assisted machines, quality of life can be improved. However, most of these apparatus are not designed based on bio signals. Degeneration of function cannot only be caused by lack of appropriate support, but also by overexerting due to extra non-required support, as well as, fatigue due to insufficient support. Thus, the appropriate assistance is not sufficiently achieved. We must design the new assisted machines that interact with the person’s body and acquire required feedback from bio-signals.
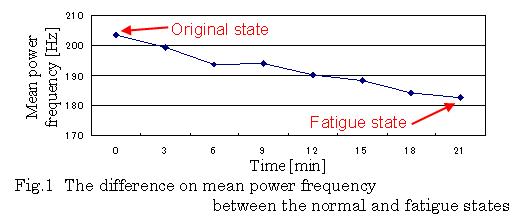
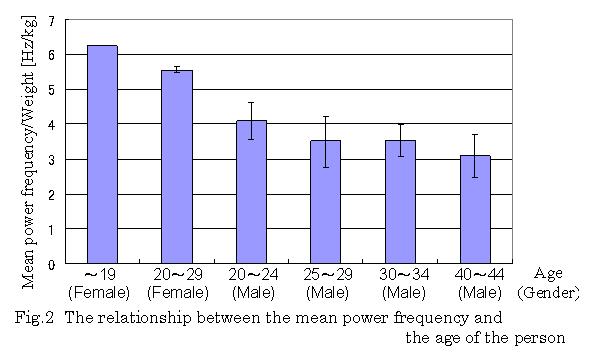
Surface electromyography contains important information to understand the state of the living body system. Since electromyography is complex non-stationary signals, a common technique to analyze them is the use of the Fourier transformation to acquire frequency information. Some studies found that the electromyography average frequency's decreases due to fatigue. And we make this claim sure with the experiment. (Fig 1) In addition, we made a Forearm bending experiment .It was suggested that there is a correlation in the average frequency and the age of the person. (Fig 2) However, quantification of muscle fatigue only by average frequency of surface electromyography is not enough. In this study we compute the power spectrum of surface electromyography by Fourier transform, then, we try acquiring characteristic features from the power spectrum.
Development of Evolutionary Design System for Dynamically Stable Legged Locomotion
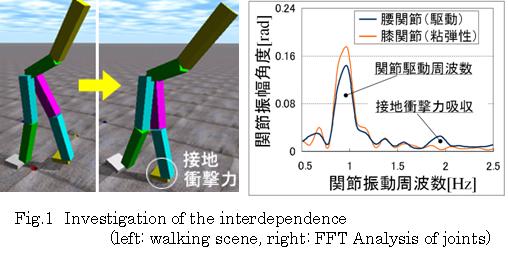
Evolutionary robotics aims at designing autonomous robots with technological applications of biological evolution. These design approaches have characteristics to exclude designer’s bias so that unexpected superior functions tend to emerge. In this research, we mainly focus on “interdependence between controller and morphology,” which is represented by passive dynamics walkers, and apply evolutionary robotics to achieve dynamically stable legged locomotion such as running and jumping.
| (i) | We investigated the morphology and controller of biped robots because we viewed them as design components that together can induce dynamically stable locomotion. We conducted coupled evolution of the morphology and controller in three-dimensional simulation. As results, both pseudo-passive dynamic walkers (PPDWs) and active-control walkers (ACWs) emerged, but the PPDWs showed more dynamic stability than ACWs. Finally, we have concluded that appropriate compliance is a key to achieving dynamical stability and a computational trade-off between controller and morphology occurs in these devices. |
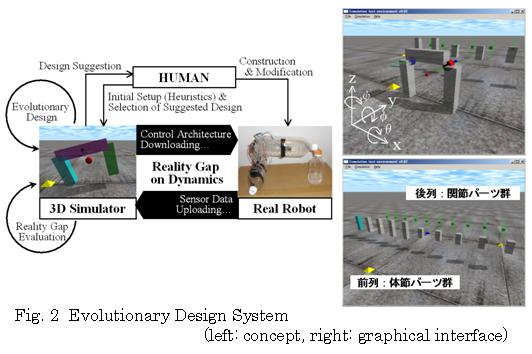
| (ii) | An important issue in evolutionary robotics is to solve “reality gap” problem, which indicates functions of virtual robots do not necessarily realize in real world. We propose interdependent use of evolutionary and heuristic designs for crossing reality gaps and develop graphical interfaces, which integrate heuristics into evolutionary design (fig.2). |
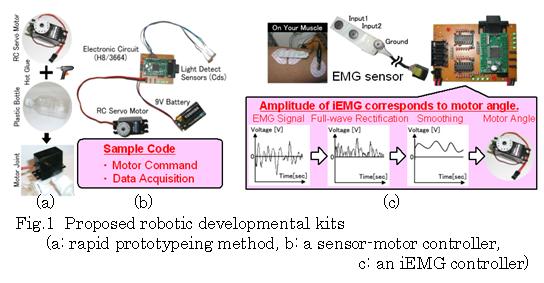
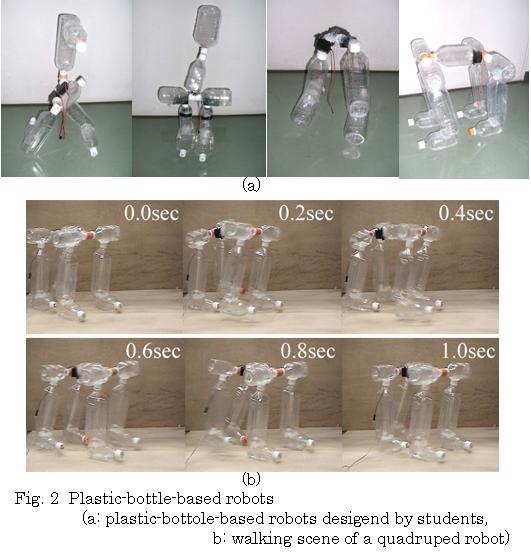
Educational Robotics Courses: Creative Design of Locomotive Robots with Plastic Bottles
The decrease in the number of engineering students has focused on educational robotics courses, which concretely encourages student interest in and curiosity about science and technology. In this research, we also provide an attractive solution to this vexing problem by proposing an educational robotics approach featuring a unique robotic development kit - hardware, software, and instructions. The kit was developed based on practical policies: easy construction, low cost, creative activity, and enjoyable education. It uses common materials such as plastic bottles, RC servomotors, and hot glue, and provides two different controllers with instructions - a sensor-motor controller and an electromyography (EMG) interface controller. The kit thus offers more custom access to both robot structure and control architecture than similar kits and encourages students to become engaged creatively.