認知発達機械研究室(Developmental Cognitive Machines Laboratory)
研究紹介
- 総括
- ねじりバネ式ワイヤ駆動を用いた多自由度高出力ロボットハンドの開発
- 人間・機械相互適応
- 筋電義手使用時の適応機能評価のための脳機能解析
- 下肢麻痺者の歩行補助システムに関する研究
- 筋電図の特徴を利用した筋疲労の定量化
- 動的安定性を有する脚移動体の進化設計システム開発
- ものづくり教育:ペットボトルを使った創造的なロボット製作
総括
当研究室は,「成長と発達の機能を持つ知性ある精密機械」の構築を目指して,平成16年3月に設立されました.また,精密機械工学専攻知能システム部門の構成メンバーであり,新井研究室および太田研究室とグループで研究に取り組んでいます.
さて,皆さんは,機械システムにどのようなイメージを抱いているでしょう.(昔は工場の中で動く薄汚れた鉄の塊でしたね.それでもその塊が日本を支えたのです)
最近の機械システムは,とても洗練され,大きな変貌を遂げて,ロボットというものに形を変えました.その変貌の過程では,電子技術との融合により,メカトロニクスという学問領域や,情報技術との融合により,知能機械という分野で研究されてきた時代もありました.
このような時代を経て,人間生活や医用福祉の分野へ進出が始まっていますし,いよいよ人の生活範囲の中に近づいてきたわけです.21世紀は,機械システムと人間社会が共生し,互いに高めあえる社会を構築すべき時代になりました.
このような時代背景を受けて必要となるのが,社会生活を営むための実際に役立つ知的なシステムをどのように作り出すかという問題です.これまでのような硬く冷たい機械ではなく,「滑らかに柔らかく触れ合えるような精密な機械」,このような精密機械のシステムを創り出すことが,この研究分野の目指すところです.
そのためには,ロボットや機械が学習したり,競争しながら進化したり,環境に適応したり,まるで人間や生き物が行うような認知適応行動を実現することが求められ,我々の住む物理的な世界との直接的なふれあいや相互作用に馴染むシステムを作り出さなければなりません.換言すれば,機械的な意味での正確さよりも,知能的な意味での緻密さ精密さを求めてゆくことになります.
このように当研究室の主要課題は,人を中心にすえた工学の理論体系及びその周辺技術の再構築であり,人や生物そのものを工学的視点から科学することから始まり,人・機械,および社会と機械の自然なインターフェースやそれらの融合技術に関する探究を行っています.
研究のバックグラウンドには,人間機械共適応系,認知科学,生体信号処理,ロボティクス,メカトロニクス,学習理論,進化計算,身体性機械論などがあり,これらの学問領域を中心に古くて新しい相互作用系に興味を持っています.
ねじりバネ式ワイヤ駆動を用いた多自由度高出力ロボットハンドの開発
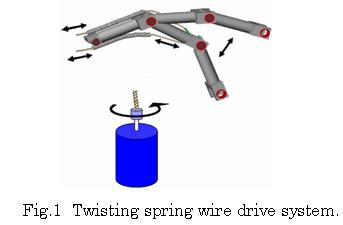
本研究は,日常生活への適用を想定した筋電義手用のロボットハンドの構築を目的としている.人の手の機能代替機器である筋電義手は,軽量,高出力,多自由度であることに加えて,人間の手に見られるような柔らかさを実現するための粘弾性が必要となる.本研究では,これらの条件を満たすため,駆動方式にはねじりバネ式ワイヤ駆動を,関節機構には二種のパラレルワイヤ型干渉駆動関節を提案する.
[1]ねじりバネ式ワイヤ駆動方式 提案手法は,ハンド外部に装着したモータでワイヤをねじることにより運動を生成する駆動方式である(Fig.1).モータがハンド外部に装着されるため,ハンド先端部の軽量化が可能となる.また,二重ワイヤをねじることで,ワイヤがバネの特性を持つこととなり,直列型の粘弾性アクチュエータの実現が期待できる.
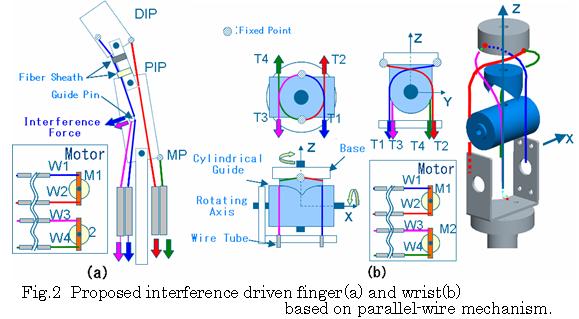
[2]パラレルワイヤ型干渉駆動関節 開発ハンドの指部には,人の腱駆動を模したワイヤ駆動を採用している(Fig.2(a)).W1は繊維鞘に相当するガイドワイヤを通すことにより,DIP・PIP関節だけでなく,MP関節をも屈曲させることができ,W1W3を同時に牽引した場合にはMP関節に2つの牽引力が干渉し高出力が期待できる.また,手首関節および親指MP関節には,複数のワイヤ張力の伝達方向を円筒摺動面を持つワイヤガイドで変化させることで,その出力を干渉させる駆動関節を開発した.本研究では,回転軸をオイルレスベアリングで構築し,これをワイヤ周導面としてFig.2(b)のように設計することで,高出力を実現する.
人間・機械相互適応
1. はじめに
近年,人間の運動機能を代替する機械の知能化研究が盛んに行われており,生体信号からの人間の動作意図推定は中心的な課題である.しかしながら,生体信号は非線形的な波形信号かつ個人差や時間的変動による影響が非常に大きいため,その解析はかなり難度が高い.我々はこの問題に対して,情報処理的な適応学習の方法論を導入することで,筋電位から数多くの動作パターンの識別に成功し,多自由度義手の制御に適用してきた.さらに,人間の適応行動についても調査を行い,人間と機械の相互適応の様相を明らかにし,動作意図推定精度を向上させることを目指している.
2. 個性適応型制御(機械の適応)
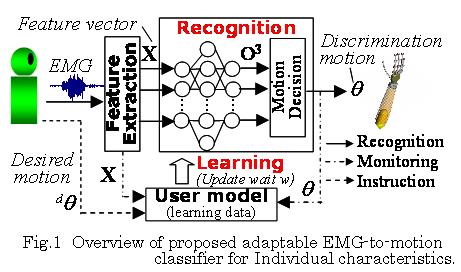
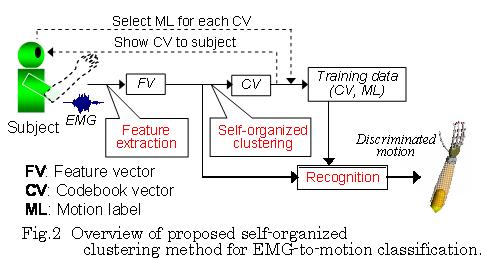
動作意図推定において,筋電位と手指運動パターンとの対応関係を後天的に機械学習にて獲得させる方法論が有効であり,このように個々人の特性に適応させて機器を制御する方法論を個性適応型制御と呼ぶ.本研究では個性適応型制御のための動作意図推定法として二種類の方法論を提案している.一つは,自己組織的クラスタリングの考え方を応用することで人間の適応過程を解析し,筋電位パターンの時間的変動に対しても手指運動パターンの識別性能が保持されるような適応学習の方法論(Fig. 1)である.一方,筋電位からの動作識別法は,ある動作パターンを明示的に教示して動作との対応関係を構築するのが一般的であるが,このような恣意的に教示する方法論では,教示動作数の増大に対して識別空間の重複が大きくなり,識別精度の低下が引き起こされる.そこで,自己組織化クラスタリングの手法を応用することで,表面筋電位から訓練データを自動生成し識別空間の重複を軽減する方法を提案している(Fig.2).
3. 義手使用時のfMRIによる脳機能解析(人間の適応)
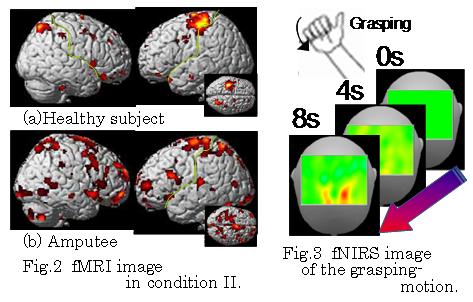
また本研究では,人間の適応過程を解析するために健常者・切断者の義手使用時の脳賦活状態のfMRIを計測している.その結果,切断者において,義手使用期間が長くなるにつれ1次運動野の賦活領域の増大・強度の増加が見られた.すなわち,人間が筋電義手に対して適応し,切断前の手同様に感じているということが考えられる.
筋電義手使用時の適応機能評価のための脳機能解析
1. はじめに
本研究では,当研究室で開発した個性適応型筋電義手が,その使用者へどのような影響を与えるかを検証するため,機能的磁気共鳴画像(fMRI)及び機能的近赤外線分光法(fNIRS)を用いた脳機能解析を行っている.健常者と切断者との脳賦活状態の差異からその機能と賦活部位の関係を明らかにし,自然な操作感を有する義手開発を目指す.
2. fMRIを用いた脳機能解析
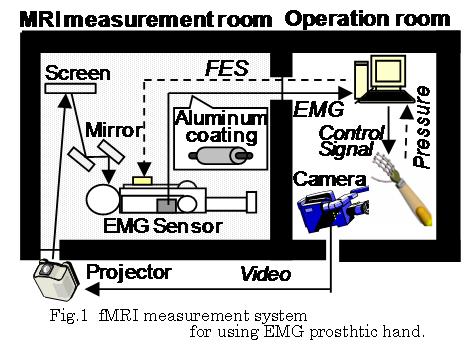
fMRIは,ある脳活動と因果関係のある局所脳血流分布の変化を磁気共鳴信号変化として検出する脳機能の非侵襲計測法である.しかし,fMRIの計測環境は高磁場下にあるため,義手そのものを計測室に入れることは不可能である.また動作に応じて発生する誘導電流が制御信号となる微弱な筋電位信号に対してノイズとなる.そこで,本研究では”信号ケーブルの静電遮蔽化”及び”プロジェクタ投影による義手映像提示”によりfMRI計測環境下での筋電義手使用を可能とした(Fig.1).また,義手を用いて円筒を把持する際の脳賦活状態を下記の2種類の計測条件下で計測した.
(1) 閉眼/右前腕(切断側)で義手制御/触覚フィードバック(電気刺激)なし
(2) 開眼/右前腕(切断側)で義手制御/左上腕部へ触覚フィードバック(電気刺激)あり
その結果,条件(1)において左側一次運動野(M1)に特徴的な賦活パターンが見られ,右手が運動していることが確認できたが,体性感覚野(S1)には賦活を特定できなかった.また,条件(2)において左側M1・S1(右前腕部)の賦活状態が認められた.すなわち,感覚としての電気刺激が左上腕に入っているにもかかわらず,右手に相当する部位が反応したことを意味する.この”錯覚現象”は,筋電義手を随意的に制御して物体把持することにより”能動的”に感覚刺激を感じたことにより起こったのではないかと考えられる(Fig. 2).
3. fNIRSを用いた脳機能解析
fNIRSは,近赤外線分光法により血流内のヘモグロビン変化を計測する非侵襲計測法であり,fMRIに比べ空間分解能は劣るが,時間分解能に優れ拘束性が小さい.本研究では,fMRI・fNIRSを併用することにより,よりダイナミックな運動評価やより自然な操作感を実現するBrain Machine Interface(BMI)の開発を目指している.
下肢麻痺者の歩行補助システムに関する研究
1.はじめに
近年,加齢学(ジェロントロジー)にみられるように,高齢化社会における高齢者の自立支援を目標とする研究が多く行われている.本研究は,神経損傷・筋力低下が原因により歩行困難な高齢者や下肢半麻痺患者を対象とし,自立歩行を実現させる歩行補助システムの開発を目的としている.また歩行補助方法として,残存する体性反射を利用する補助,機能的電気刺激による補助,パワーアシスト機による補助を提案し,これらの制御タイミングは計測された生体情報から推定する.
2.体性反射を誘発する加圧刺激による補助
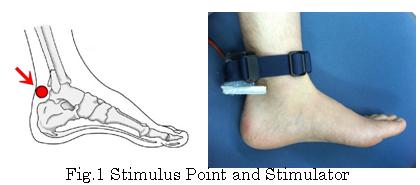
下肢麻痺者の中には,神経の再組織化を通じて特殊な反射系が形成されている場合がある.この反射を加圧刺激により誘発し,麻痺肢による歩行時には実現不可能な筋駆動を実現することで歩行補助を行う(Fig.1).
3.機能的電気刺激による補助
機能的電気刺激は,電気刺激装置により下肢麻痺部筋肉あるいは神経を刺激することが可能である.これを利用し,神経損傷などにより失われた筋肉・神経を直接刺激することで残存する機能を最大限に生かした歩行補助を行う.
4.パワーアシスト機による外力補助
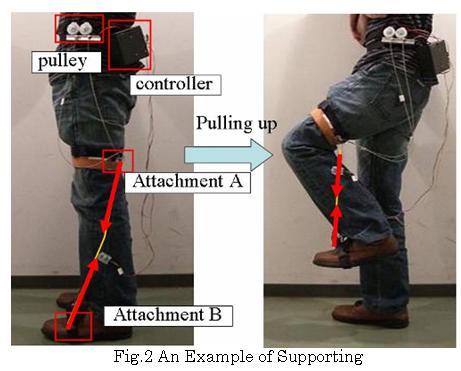
下肢装着型ワイヤ駆動補助装置を開発し,これによる外力による歩行補助を行う.この装置は,複数のワイヤで動力を伝達し制御対象である筋力の低下している筋肉の補助を行う(Fig.2).ワイヤ方式は,装着者の歩行特性に対応して筋肉補助箇所を柔軟に変更できるという利点をもつ.
5.歩行状態の識別
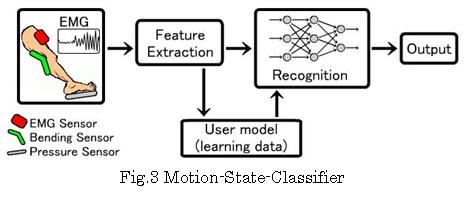
下肢半麻痺患者の歩行特性を考慮した上で,表面筋電位,関節,踏圧分布などの生体情報をフィードバックするシステムを構築し,最適なタイミングで歩行補助装置を駆動させることで歩行を支援する(Fig.3).
筋電図の特徴を利用した筋疲労の定量化
近年,健康で快適な生活を送るために,人間の日常生活動作を補助する装置の開発が盛んに行われている.このような補助装置を使用することにより,アシストなしでは困難であった作業・運動の実現が可能となり,さらに使用者の負担を軽減することができると考えられる.しかしながら,現在の補助装置のほとんどは人間の生体情報を考慮していないため,使用者に対して適切なアシストを行うことが困難である.必要以上のアシストは人間の運動機能の低下を招き,逆にアシスト不足の場合は疲労の進行を引き起こす.従って,適切なアシストを行うためには,(1)人間の生体情報の変化を的確に捉え,(2)それを補助装置に対してフィードバックする必要がある.本研究では,(1)を中心的課題とする.運動時には運動に対する習熟や発汗等様々な変化が生じるが,特に筋疲労に着目し,表面筋電位(EMG)を用いて人間の疲労状態を推定する方法論を構築することを目的とする.
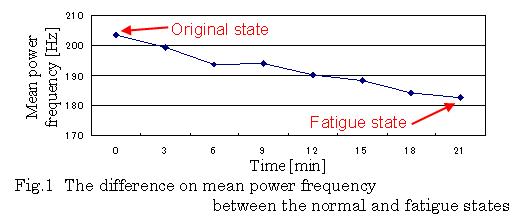
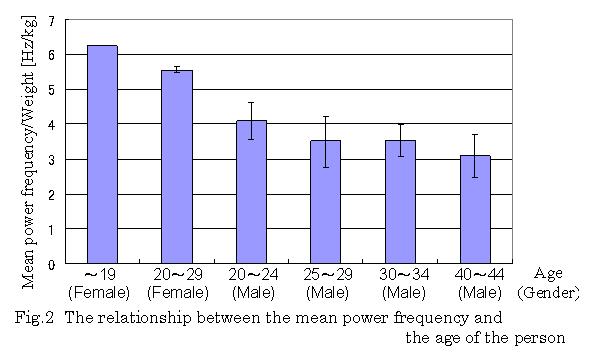
EMGは筋膜表面を伝播して筋の収縮を制御する生体信号であるため,これを計測・解析することにより人間の筋活動の様相を電気的に把握できる.EMG信号解析の代表的手法はフーリエ変換によるスペクトル推定である.また,疲労するにつれてEMGの平均周波数(MPF)は減少するということが明らかとなっている.そこで本研究ではエアロバイク運動時のEMGを計測・スペクトル推定することによりMPFを算出し,上記の知見の検証を行った(Fig.1).さらに,前腕の背屈動作を行い,動作中に計測されたEMGからMPFを算出した.その結果,MPFと年齢に相関があることが明らかとなった(Fig.2).しかしながら,MPFは1次元の時系列情報であり,筋疲労を定量的に評価するには情報量が少ない.そこで本研究では,EMGをフーリエ変換して得られるパワースペクトルから,複数のスペクトルを抽出し,それらを用いて筋疲労の定量化を試みる.
動的安定性を有する脚移動体の進化設計システム開発
進化ロボティクスは,生物の進化メカニズムを工学的に模倣した自動設計法により,自律ロボットシステムを実現するものである.そこで利用される進化設計法の主な利点は,設計におけるヒトの先見的な知識を極力抑え,予期しない機能が実現(創発)することにある.本研究は,その進化ロボティクスにおける方法論を,受動歩行ロボットで注目される「制御と形態の相互依存性」の概念に展開し,走る・跳ねるなど高度な動的安定性を有する脚移動ロボットを実現する進化設計システムの開発を目指す.
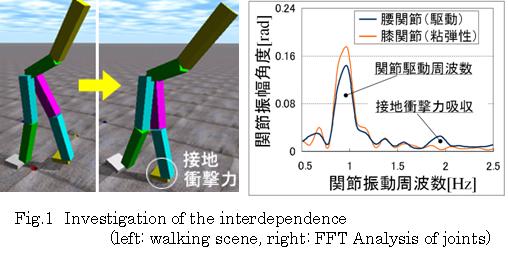
| (i) | 受動歩行機にみられる「動的安定歩行」と「形態」の関係性の知見を得るため,三次元仮想空間において,二足歩行ロボットの形態(7種類)と制御(2種類)の同時進化を行い,得られた移動機能を検証した.その結果,主に2種類の歩行(能動歩行・準受動歩行)のロボット群に分類され,特に準受動歩行ロボットの周波数解析(Fig.1)において,適切な性質・位置を有する粘弾性関節が動的安定歩行に大きく貢献することを定量的に示した(形態と制御の情報処理トレードオフの一例). |
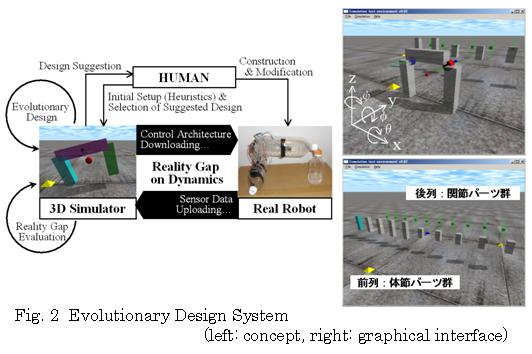
| (ii) | 進化ロボティクスにおいて,仮想空間で設計されるロボットの機能を現実空間で実現することは重要な研究課題である.このリアリティギャップ問題を解決するため,ヒトの先入観を極力排除する進化設計法とヒトの知識・経験を利用するヒューリスティック設計法を相互依存的に適用することで,動的安定性を有する脚移動ロボットを実現する進化設計システムのインターフェース開発を行っている(Fig.2). |
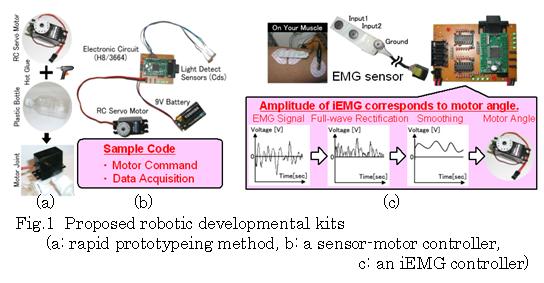
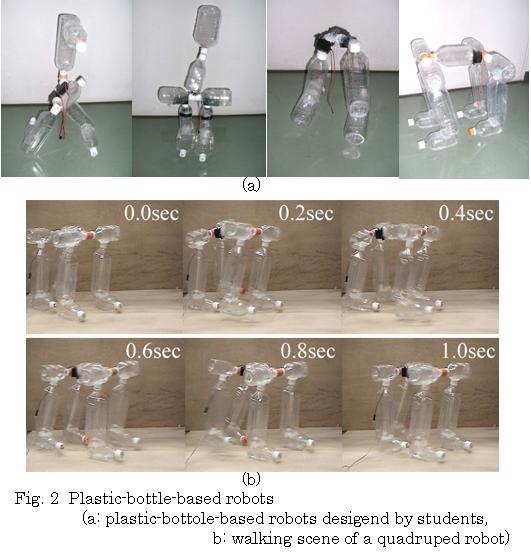
ものづくり教育:ペットボトルを使った創造的なロボット製作
理科離れが続く近年,物作りの楽しさと科学技術の面白さを伝える「ものづくり教育」が注目されている.本研究においても,ユニークなロボット開発教材を提案し,大学生および大学院生対象に物作り授業を行っている.そこでの特色としては,ペットボトルとRCサーボをグルーガンで接着というロボット簡単製作法を適用している点にあり,機械切削の技術・時間的制約がなくすことで一般学生のロボットシステム全体の構築を可能としており,創意工夫のできる開発環境を提供している.
物作り授業では受講者が移動ロボットを考案し,試行錯誤的にロボット機構の構築を可能とする.またロボットの制御においても,「センサ読取・モータ制御を理解しやすいように単純な基本機能で構成されるセンサ・モータ制御器」,「表面筋電位に応じてモータが駆動するiEMG制御器」の二種類の制御器が提供され,受講者のニーズ(好奇心,技術力,理論学習,授業時間)への柔軟な対応が可能となっている.