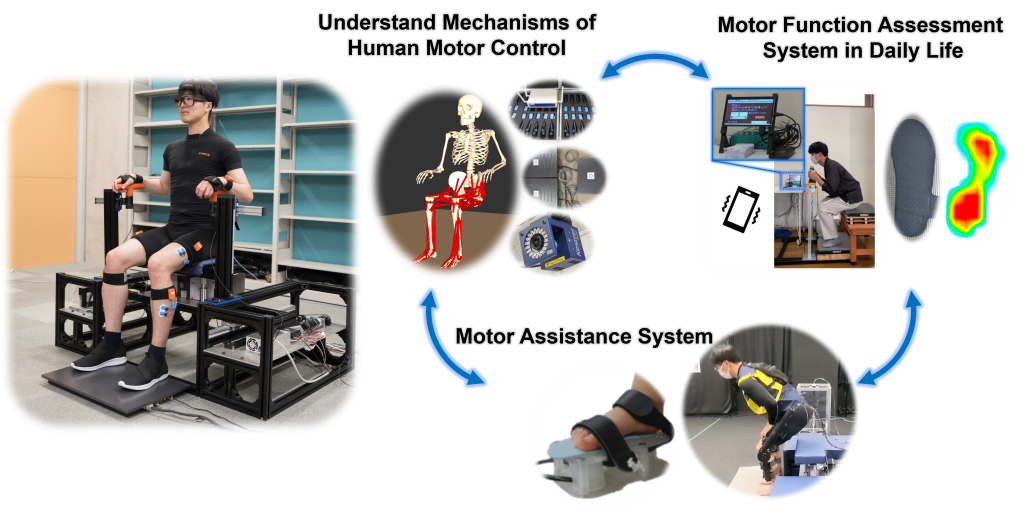
Research Motivation
Japan has become a super-aged society with an elderly population of over 25%. The number of motor diseases increases with age, which increases social security costs and burdens on caregivers and physical therapists. I am aiming to research and develop technologies to support people with motor diseases and systems to teach exercise. I am conducting a wide range of researches from basic researches on human motor mechanisms to applied researches on the development of assistive technologies. I am conducting a wide range of research, from basic research on human locomotion mechanisms to applied research on the development of assistive technologies.
Research Topic
Elucidation of the muscle synergy structure in the standing movement of healthy young adults (2008-)
In order to improve human locomotion, it is necessary to understand locomotion. In this study, to understand the human standing movement, which is the starting point of daily activities, it is important to measure the movement and analyze it phenomenologically, and to construct a model of the standing movement constructively. In particular, we analyzed muscle activity based on muscle synergy, which is a coherent activity. In particular, a study comparing the synergy of healthy young and elderly people revealed that the muscle synergy corresponding to postural control is weakened in the elderly. In addition, to clarify how humans adaptively generate locomotion to different environments, we measured rising from chairs with different seat heights (external environment) and standing with different locomotion speeds (internal environment). The results showed that although muscle synergies were common across environments, adaptive movements were achieved by varying their activity weights. In a constructivist model of the human musculoskeletal system, it was found that human standing movements could be generated by controlling the three muscle synergies without actually controlling the lower limb muscles individually.
- Kazunori Yoshida, Qi An, Hiroyuki Hamada, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, and Hajime Asama, "Artificial neural network that modifies muscle activity in sit-to-stand motion using sensory input", Advanced Robotics, vol. 35, pp. 858-866, 2021. [pdf][link]
- Kazunori Yoshida, Qi An, Arito Yozu, Ryosuke Chiba, Kaoru Takakusaki, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, and Hajime Asama, "Visual and Vestibular Inputs Affect Muscle Synergies Responsible for Body Extension and Stabilization in Sit-to-Stand Motion", Frontiers in Neuroscience, vol. 12, Article 1042, doi: 10.3389/fnins.2018.01042, 2018. [link]
- Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama, "Muscle Synergy Structure using Different Strategies in Human Standing-up Motion", Advanced Robotics, Vol.31, No.1, January 2017. [pdf][link]
- Qi An, 石川雄己, 舩戸徹郎, 青井伸也, 岡敬之, 山川博司, 山下淳, 淺間一, 座面高と速度の異なるヒト起立動作における筋シナジー解析, 計測自動制御学会論文集, vol. 50, no. 8, pp. 560-568, 2014 (計測自動制御学会論文賞受賞). [pdf][link]
- Qi An, Yusuke Ikemoto, and Hajime Asama, "Synergy Analysis of Sit-to-Stand in Young and Elderly People", Journal of Robotics and Mechatronics, vol. 25, no. 8, pp. 1038-1049, 2013. [pdf][link] Qi An, Yuki Ishikawa, Shinya Aoi, Tetsuro Funato, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Muscle Synergy Contribution on Human Standing-up Motion Using Human Neuro-Musculoskeletal Model", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp.5885-5890, Seattle (USA), May 2015. [pdf][link]
Elucidation of muscle synergy structures in standing movements of hemiplegic patients and skill analysis of physical therapists (2015-)
This study, conducted in collaboration with Morinomiya Hospital and RIKEN, investigated the identification of muscle synergy structures in hemiplegic patients and how their movements were altered by physical therapist intervention. In hemiplegic patients, the activity of muscle synergy 2, which is responsible for gluteal release, was particularly slow and prolonged. On the other hand, when physical therapists intervened at the hips and knees, the patients were able to stand up more smoothly and the activity of muscle synergy 2 was improved. We plan to apply these findings to the development of a support system in the future.
- Hiroshi Yamasaki, Qi An, Koji Takahashi, Takanori Fujii, Ningjia Yang, Matti Itkonen, Moeka Yokoyama, Fady S.K. Alnajjar, Hironori Otomune, Noriaki Hattori, Ichiro Miyai, and Shingo Shimoda, "Evaluating the Impact of Therapeutic Handling on Sit-to-Stand Movements Post-Stroke: Kinematic Smoothness as a Monitoring Metric for Recovery", Journal of Bodywork and Movement Therapies, vol. 42, pp. 620-628, 2025. [link]
- Ruoxi Wang, Qi An, Ningjia Yang, et al., "Clarify sit-to-stand muscle synergy and tension changes in subacute stroke rehabilitation by musculoskeletal modeling", Frontiers in Systems Neuroscience, vol. 16, pp. 1-16, 2022. [pdf]
- Hiroki Kogami, Qi An, Ningjia Yang, et al., "Analysis of muscle synergy and kinematics in sit-to-stand motion of hemiplegic patients in subacute period", Advanced Robotics, vol. 35, pp. 867-877, 2021. [pdf]
- Ningjia Yang, Qi An, Hiroki Kogami, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady Shibata-Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama, "Temporal muscle synergy features estimate effects of short-term rehabilitation in sit-to-stand of post-stroke patients", IEEE Robotics and Automation Letter, vol. 5, no. 2, pp. 1796-1802, 2020. [link]
- Ningjia Yang, Qi An, Hiroki Kogami, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady S. Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita, and Hajime Asama, "Temporal features of muscle synergies in sit-to-stand motion reflect the motor impairment of post-stroke patients", IEEE Transaction on Neural Systems and Rehabilitation Engineering, vol. 27, no. 10, pp. 2118-2127, 2019. [pdf][link]
- Hiroshi Yamasaki, Qi An, Makoto Kinomoto, Koji Takahashi, Takanori Fujii, Hiroki Kogami, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Matti Itkonen, Moeka Sonoo, Fady Alnajjar, Atsushi Yamashita, Hironori Otomune, Noriaki Hattori, Hajime Asama, Ichiro Miyai, and Shingo Shimoda, "Organization of functional modularity in sitting balance response and gait performance after stroke", Clinical Biomechanics, vol. 67, pp. 61-69, 2019. [link]
- Hiroki Kogami, Qi An, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Hajime Asama, Shingo Shimoda, Hiroshi Yamasaki, Matti Itkonen, Fady Alnajjar, Noriaki Hattori, Makoto Kinomoto, Kouji Takahashi, Takanori Fujii, Hironori Otomune and Ichiro Miyai, "Effect of Physical Therapy on Muscle Synergy Structure during Standing-up Motion of Hemiplegic Patients", IEEE Robotics Automation Letter. [link]
- Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Matti Itkonen, Fady Alnajjar, Shingo Shimoda, Hajime Asama, Noriaki Hattori and Ichiro Miyai, "Clarification of Muscle Synergy Structure During Standing-Up Motion of Healthy Young, Elderly and Post-Stroke Patients", Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), pp. 19-24, London (UK), July 2017. [pdf][link]
Understanding mechanism of Parkinson's disease and development of diagnosis system (2024-)
This study is being conducted in collaboration with Juntendo University Hospital. Parkinson's disease is a neurodegenerative disorder characterized by symptoms such as bradykinesia and tremors in the limbs. The symptoms fluctuate throughout the day and progressively worsen over time. Therefore, understanding the mechanisms of Parkinson's disease and developing a diagnostic system that can be used in daily life is crucial. In this study, we aim to build a system for diagnosing and predicting symptom onset and progression by utilizing motion capture, electromyography (EMG) measurements and analysis, and insole-type pressure sensors.
- Rukiye Aydin, Hiroyuki Hamada, Ken Kikuchi, Shingo Shimoda, Yoshihiro Kameyama, Kazunori Sato, Daiki Kamiyama, Eriko Kitahara, Atsushi Yamashita, Tomokazu Shimazu, Genko Oyama, Toshiyuki Fujiwara and Qi An: "Ground Reaction Forces in Parkinson's Disease OFF and ON States Reflect Changes in Muscle Synergies: A Pilot Study", 6th International Conference on NeuroRehabilitation (ICNR2024), , pp. 188-192, December 2024.
Welfare system to diagnose motor ability (2019-)
Understanding one's own motor function and predicting how it will change in the future is crucial. While motion capture and electromyography (EMG) provide detailed information about movement, their high cost and installation constraints make daily use impractical. In this study, we focus on the reliance of individuals with motor impairments on assistive devices such as handrails. We hypothesize that greater force exerted on these devices indicates a decline in motor function. To test this hypothesis, we have developed a handrail capable of measuring the forces applied during standing-up motions. Using this data, we are building a system to assess the severity of motor impairments and predict changes in motor function one month later. This system will enable motor function assessment simply by gripping the handrail while standing up.
- 若松宥太,菊地謙,濵田裕幸,中山和洋,三好敢太,山下淳,安琪,起立動作中に手すりにかかる力を用いた高齢者の下肢関節トルクの推定,計測自動制御学会システム・情報部門学術講演会2024(SSI2024),pp. 169-173,富山,2024年11月(SSI優秀論文賞 受賞)
- Qi An, Ningjia Yang, et al., "Classification of Motor Impairments of Post-stroke Patients based on Force Applied to a Handrail", IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 2399-2406, 2021. [pdf][link]
- Ryoya Kihara, Qi An, Kensuke Takita, Shu Ishiguro, Kazuto Nakashima, Ryo Kurazume, "Analysis of Force Applied to Horizontal and Vertical Handrails with Impaired Motor Function", Proceedings of 2023 IEEE/SICE International Symposium on System Integration (SII), Atlanta, USA, pp.1-6, 2023/Jan.
- 木原諒也,安琪,滝田謙介,石黒周,中山和洋,三好敢太,中嶋一斗,倉爪亮,起立動作中に手すり・臀部・足底部にかかる力を用いた高齢者の体力測定データの評価,第24回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2023),pp. 3076-3081,新潟,2023年12月.
- 安琪,山川博司,湖上碩樹,吉田和憲,王若曦,山下淳,淺間一,楊濘嘉, 横山萌香,下田真吾,Fady Alnajjar,山崎弘嗣,石黒周,服部憲明,高橋幸 治,藤井崇典,乙宗宏範,宮井一郎,倉爪亮,起立動作中の縦手すりにかかる力 を用いた運動機能の評価,LIFE2020-2021,pp. 114-116, オンライ ン,2021年09月.
- Qi An,山川博司,湖上碩樹,吉田和憲,王若曦,山下淳,淺間一,石黒周,下田真吾, 楊濘嘉,山崎弘嗣,園尾萌香, Alnajjar Fady,服部憲明,高橋幸治,藤井崇典,乙宗宏範,宮井一郎,倉爪亮,片麻痺患者の起立動作中の手すりにかかる力を用いた運動障害の度合の分類,第38回日本ロボット学会・学術講演会論文集(RSJ2020), 2H2-02,オンライン,2020年10月.
- Qi An,山川博司,楊濘嘉,湖上碩樹,吉田和憲,山下淳, 石黒周, 下田真吾,山崎弘嗣,園尾萌香,Fady S. Alnajjar,木野本誠,服部憲明,高橋幸治,藤井崇典,乙宗宏範,宮井一郎,淺間一,片麻痺患者の起立動作における縦手すりにかかる力の解析, 計測自動制御学会 システム・情報部門 学術講演会2019(SSI2019),千葉,2019年11月.
Robot system to assist sit-to-stand motion of the elderly (2021-)
In daily life, improving motor function requires adjusting the level of assistance according to the user's physical abilities and providing only the minimum necessary support. This study aims to enhance movement and boost self-efficacy by teaching key movement strategies (or "tips") using lightweight and compact devices, rather than relying on large-scale equipment. In collaboration with RIKEN and Kyoto University, we are developing a system that estimates movement intentions and motor abilities using a wearable suit and supports standing-up motions with a chair-type assistive device and a lightweight exoskeleton robot.
- Julian Ilham, Yuichi Nakamura, Takahide Ito, Kazuaki Kondo, Jun-ichiro Furukawa, Qi An, and Kei Shimonishi, "Time Series Prediction of Sit-To-Stand Muscle Synergy Using Deep Learning", Proceedings of IEEE/SICE International Symposium on System Integration (SII2025), Munich, Germanay, January 2025.
- Julian Ilham, Yuichi Nakamura, Takahide Ito, Kazuaki Kondo, Qi An, Junichi Akita and Masashi Toda, "Improving repeatability of surface electromyography measurement of sit-to-stand motions by using muscle synergy", Biomedical Signal Processing and Control, vol. 93, Article 106185, 2024. [link]
- 早瀬瑞華,菊地謙,古川淳一朗,井藤隆秀,森本淳,中村裕一,淺間一,山下淳,安琪,起立動作中の筋力モビリティ楕円体を考慮した支援椅子の座面制御法の開発,2024年度精密工学会春季大会学術講演会,pp. 452-453,東京,2024年03月(ベストプレゼンテーション賞受賞).
- 早瀬瑞華,菊地謙,古川淳一朗,井藤隆秀,森本淳,中村裕一,淺間一,山下淳,安琪,加齢が起立動作中の筋力モビリティ楕円体に与える影響の解析と支援椅子の座面制御法への応用,第33回ライフサポート学会フロンティア講演会予稿集,p. 49,埼玉,2024年03月(ライフサポート学会奨励賞 受賞).
- 早瀬瑞華,菊地謙,古川淳一朗,井藤隆秀,森本淳,中村裕一,淺間一,山下淳,安琪,加齢が起立動作中の筋力モビリティ楕円体に与える影響,第24回計測自動制御学会システムインテグレーション部門講演会(SI2023),pp. 3004-3006, 新潟,2023年12月.
- Takahide Ito, Jun-Ichiro Furukawa, Qi An, Jun Morimoto, and Yuichi Nakamura, "Muscle Synergy Analysis Under Fast Sit-to-stand Assist : A Preliminary Study", pp. 320-322, Proceedings of Augmented Humans 2023, March 2023.
- Jun-ichiro Furukawa, Shotaro Okajima, Qi An, Yuichi Nakamura, and Jun Morimoto, “Selective assist strategy by using lightweight carbon frame exoskeleton robot”, IEEE Robotics and Automation Letter, vol. 7, no. 2, pp. 3890 - 3897, 2022. [link][pdf]
- Yamato Kuroda, Qi An, Hiroshi Yamakawa, Shingo Shimoda, Jun-ichiro Furukawa, Jun Morimoto, Yuichi Nakamura, Ryo Kurazume, "Development of a Chair to Support Human Standing Motion -Seat movement mechanism using zip chain actuator-", Proceedings of 2022 IEEE/SICE International Symposium on System Integration (SII), ONLINE, pp.555-560, January 2022.
- 黒田大登,安琪,山川博司,下田真吾,古川淳一朗,森本淳,中村裕一,倉爪亮,ヒトの起立動作を支援する椅子の開発~ジップチェーンアクチュエータを用いた座面の移動機構~,第39回日本ロボット学会学術講演会(RSJ2021),1J2-02,オンライン,2021年09月.
Robot system to improve motor ability of children with disabilities (2020-)
Unlike adults, pediatric rehabilitation presents several challenges. For example, children's body proportions change as they grow, and their body schema, which develops through experience, is not yet fully established. As a result, rehabilitation for children is not merely about reacquiring lost motor skills but often involves acquiring new ones—a process known as habilitation.
To support motor function recovery in children, this study focuses on the hands-on intervention techniques used by physical therapists. We hypothesize that these interventions improve motor function by providing sensory input to the body. By measuring the intervention techniques performed by physical therapists and evaluating their effects on movement, we aim to develop assistive devices that replicate these techniques. This will enable the creation of a rehabilitation system that adapts to different body sizes and can be used at home.
- 陳童,菊地謙,濵田裕幸,氷上隆三,山下淳,安琪,理学療法士が足底部への介入技能を再現する刺激装置の開発ー刺激力の再現と検証ー,第37回自律分散システム・シンポジウム資料,pp. 149-150,山口,2025年01月.
- Yuki Uchiyama, Ken Kikuchi, Hiroyuki Hamada, Tadamitsu Matsuda, Atsushi Yamashita and Qi An: "Effects of Manual Therapy on Joint Angle during Functional Reach Test in Children with Cerebral Palsy", 6th International Conference on NeuroRehabilitation (ICNR2024), pp. 94-98, December 2024, November 2024.
- Qi An, Hiroyuki Hamada, Shigeki Maruta, Yuki Abe, Kenichi Takada, Ken Kikuchi, Hiroshi Yamakawa, Hajime Asama, and Atsushi Yamashita, "Pneumatic plantar stimulation device replicating manual therapy improves lateral stability in standing posture", Journal of Robotics and Mechatronics, vol. 36, no. 4, pp. 813-822, 2024. [link]
- 古賀洋平,安琪,倉爪亮,理学療法士の介入技能を再現する足底部の刺激装置の開発,日本機械学会ロボティクスメカトロニクス講演会2023,1A1-E04,愛知,2023年06月.
- 古賀洋平,安琪,倉爪亮,幼児の足底部への理学療法士の介入技能の解析と立位姿勢中の足底圧中心・筋電位に与える影響の評価,LIFE2022,1P1-A4, 2022年08月.
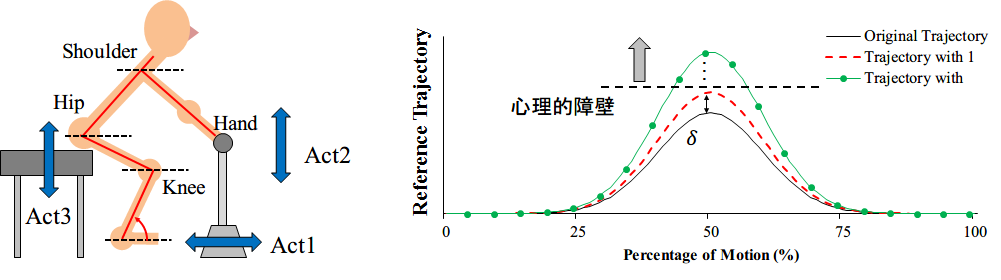
Design of an assistance system based on minimum agnostic difference using self-efficacy (2012)
In order for elderly people to recover their physical functions, they need to overcome psychological barriers and have a sense of self-efficacy that they can accomplish their movements. In the field of rehabilitation, psychological barriers sometimes prevent people from fully exercising their original functions. In this study, we proposed a system that naturally overcomes psychological barriers and gives a sense of self-efficacy by gradually changing the trajectory of the assist device to the extent that the subject does not notice it (minimum knowable difference).
- Qi An, Yuki Ishikawa, Junki Nakagawa, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama, "Measurement of Just Noticeable Difference of Hip Joint for Implementation of Self-efficacy: In Active and Passive Sensation and Different Speed", Advanced Robotics, vol. 28, no. 7, pp. 505-515, 2014. [pdf][link]
Motion Teaching System for Rowing Motion of a Boat (2013-2014)
In order to improve the motor skills of unskilled rowers, we developed a system that extracts the differences between skilled and unskilled rowers as motor skills and teaches them. As shown in the video below, we created a system that visualizes the muscle activity during a movement and presents it in real time. This system can be used as a teaching tool by recording the movements of skilled users, or by unskilled users to check their own movements.
- Qi An, 柳井香史朗, 中川純希, 温文, 山川博司, 山下淳, 淺間一, 実映像と筋活動の重畳表示によるローイング動作教育システム, 日本機械学会論文集, Vol.82, No.834, 15-00424, pp.1-11, 2016. [pdf][link]
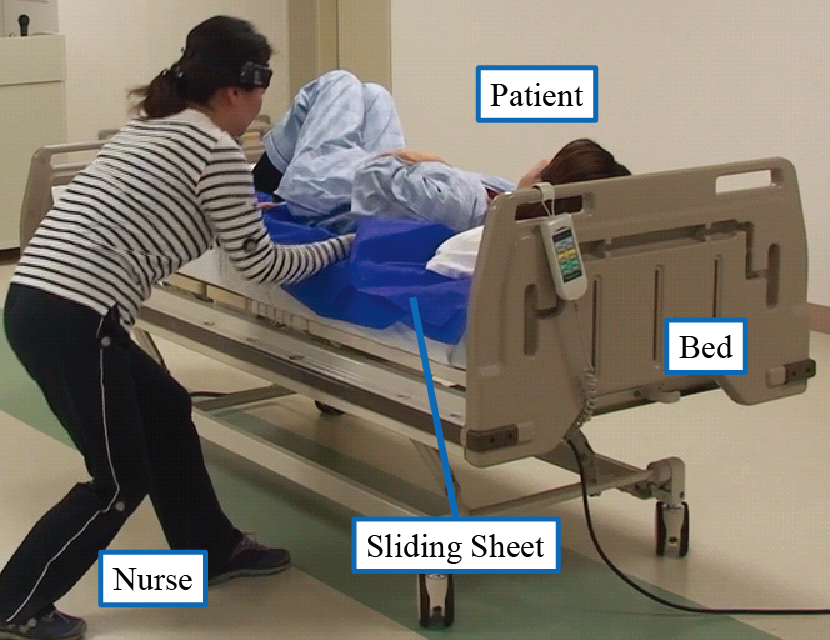
Extraction of skills for nursing care movements using sliding sheets (2013-2014)
Posture change is important for bedridden patients in order to prevent bedsores. In this study, we extracted the skills of a skilled person in pulling a sheet and taught them to an unskilled person. In this study, we extracted the skills of a skilled person when he or she pulls the seat, and examined whether teaching them to a non-skilled person would increase the effectiveness of motor learning.
- 中川純希, Qi An, 石川雄己, 柳井香史朗, 保田淳子, 温文, 山川博司, 山下淳, 淺間一, シートを使ったベッド上介助動作における技能教示サービスシステムの提案, サービス学会第3回国内大会講演論文集, pp. 323-324, 金沢, 2015年4月.
- Junki Nakagawa, Qi An, Yuki Ishikawa, Koshiro Yanai, Wen Wen, Hiroshi Yamakawa, Junko Yasuda, Atsushi Yamashita, and Hajime Asama, "Extraction and Evaluation of Proficiency in Bed Care Motion for Education Service of Nursing Skill", Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp. 91-96,Yokohama, Japan, 2014/Sep. [pdf]
Development of a force information feedback system using vibrotactile stimulation for the development of artificial limbs (2011)
Conventional prosthetic hand users are unable to know the force applied to their fingertips when manipulating objects, and are unable to fully utilize their prosthetic hands. In this study, we developed a device that uses vibrotactile feedback to present the force applied to the fingertip to the user in a non-invasive and safe manner through vibration. After two weeks of training, we found that people could learn the force information from the tactile vibration stimuli, and the accuracy of object manipulation was improved. After two weeks of training, people were able to learn enough force information from the vibratory stimuli to perform object manipulation. As a result, the effectiveness of the proposed method was demonstrated by the fact that a single tactile vibration device attached to the arm, which is a very safe and simple method, significantly improved human manipulation of objects.
- Cara, E. Stepp, Qi An, and Yoky Matsuoka, "Repeated Training with Augmentative Vibrotactile Feedback Increases Object Manipulation Performance", PLoS ONE, 7(2), e32743, 2012. [pdf][link]
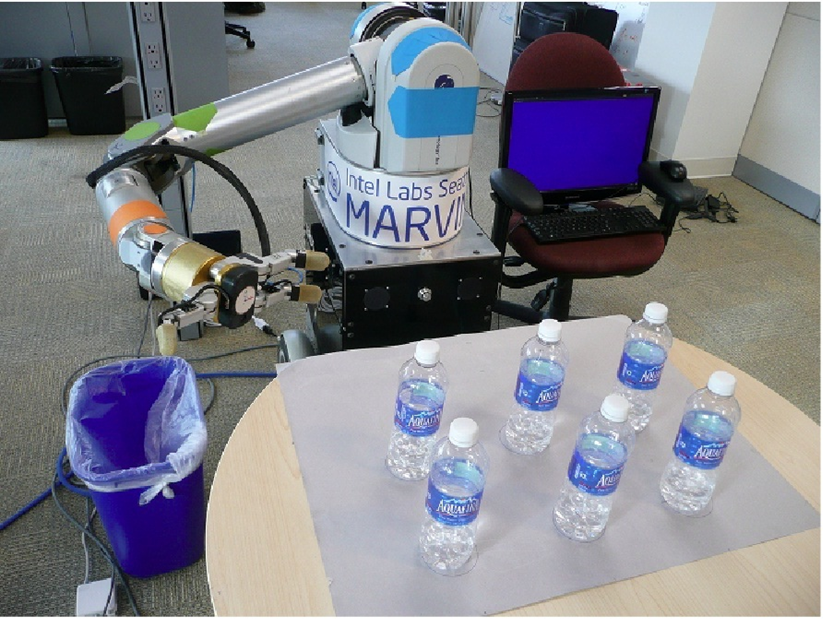
Control of robot manipulators using voice recognition system (2011)
We developed a voice-activated control method for a robot manipulator intended to assist people with limb disabilities, such as paraplegics. We compared the performance of three different control laws: 1. single-joint control, 2. endpoint position control, and 3. multi-joint cooperative control. We compared the performance of three different control laws: 1) grabbing a bottle from a desk and throwing it into a trash can about 0.5 m away, 2) carrying a bag containing six plastic bottles to a desk about 1.0 m away, and 3) standing a collapsed bottle upright. The results showed that the subjects performed significantly better in terms of work time and success rate for single-joint control and multi-joint cooperative control than for endpoint position control.


- Mike Chung, Eric Rombokas, Qi An, Yoky Matsuoka, Jeff Bilmes, "Continuous Vocalization Control Of A Full-Scale Assistive Robot", Proccedings of IEEE International Conference on Biomedical Robotics and Biomechatronics 2012 (BioRob 2012), pp. 1464-1469, Rome, Italy, 2012/Jun. [pdf]
Research Equipment
In our research group, we have a complete set of experimental equipment that can be used to analyze human motion and to evaluate and control assistive devices. We mainly use a motion capture system, a floor reaction force meter, and an electromyograph, which can be called the three sacred instruments in biomechanics research.
Optical Motion Capture System
We have an optical motion capture system for measuring human body motion. A total of 11 cameras can be used to measure the motion. By attaching infrared reflective markers to the body, we can measure the 3D position of the markers in space. We also use a motion capture system that requires no calibration. It has blind spots, so it is not a panacea, but it saves the time of calibration. The SDK is also available, so we can provide feedback to the user as they move.


Forceplate
We have three floor reaction force gauges, each of which can measure the floor reaction forces of the left and right feet and buttocks. The force can be measured in six axes (force + moment), and the center of pressure can be determined. The large floor reaction force meter has a vertical capacity of 10,000 N and can measure sports activities such as jumping. A wireless foot sensor is used to measure motions outside of the floor reaction force meter, such as walking.

EMG Sensor
We have two types of wireless electromyographs (Cometa and Delsys). The Cometa electromyograph can measure 32 channels of muscle. The Cometa EMG can measure 32 channels of muscle. 32 channels may sound like a lot, but it is useful for patients with asymmetrical left-right movements such as hemiplegics. It is also used to measure upper limbs and trunk together. When we use all 32 channels, we use up a whole bag of electrodes… We are in the process of increasing the number of Delsys electromyographs. It will be used for a new experimental system. We have up to 48 channels of wireless electromyographs. We also have 16 channels of wired electromyographs. We also have 16 wired electromyographs, which I used in my doctoral course. This is the one I used in my doctoral course, and it has been my go-to when I need more channels.