認知発達機械研究室(Developmental Congnitive Machines Laboratory)
講義 精密工学・メカトロニクス入門
− 講義目的 −
学生自らの筋肉の収縮時の活動電位(筋電)を身体表面から計測し,自分の体が電気的にコントロールされている事象について学ぶ,また,その強弱や波形パターンを用いて,コンピュータゲームのコンテストを行うことで,あたかもゲーム機が自分の身体の一部となることを体験する。
− 筋電移動ロボットの製作 −
制作風景
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
レースレギュレーション
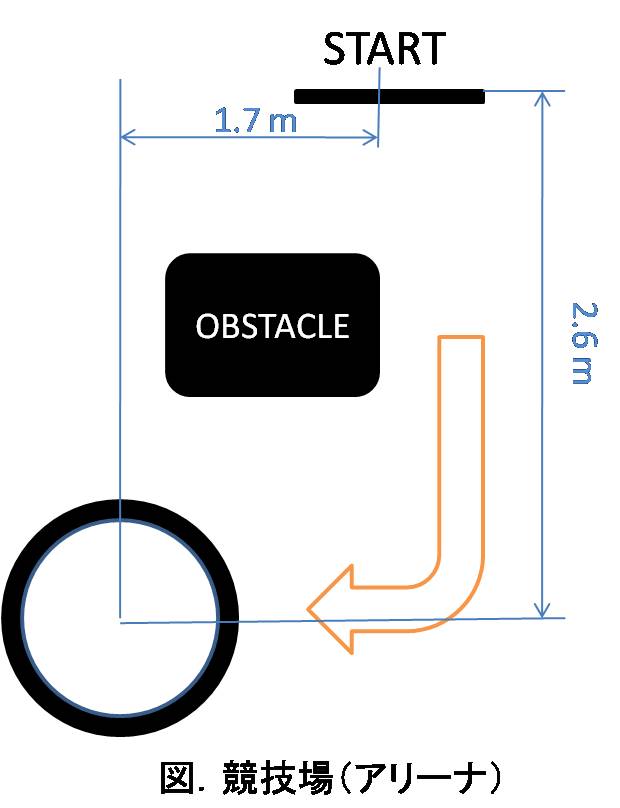
- 競技は,スタート地点のAの場所からゴールの枠に接触するまでにかかる時間の短さを競うものとする.
- 成績はかかった時間の長さ (ただし,1分以内を限度とし,1分以上かかったものについては,最終到達点とゴールの中心との距離を成績とする)
- 障害物には,接触してもよい.
レース結果
| 順位 | チーム名 | メンバー | 記録 |
| 1位 | TAチーム | 近藤,鹿内 | 8秒 |
| 2位 | Iチーム | 松岡,米,松崎 | 17秒 |
| 3位 | Eチーム | 八重樫,飯島 | 18秒 |
| 4位 | Bチーム | 藤澤,蟹江,中村 | 22秒 |
| 5位 | Hチーム | 石原,渡辺 | 39秒 |
| 6位 | Aチーム | 鳥谷部,藤原 | 43秒 |
| 7位 | Dチーム | 山田,小松 | 190cm |
| 8位 | Cチーム | 須山,堀口 | 305cm |
| 9位 | Fチーム | 生駒,下園,郷津 | 310cm |
| 10位 | Jチーム | 川合 | Over range |
− レポート課題について −
| レポート内容: |
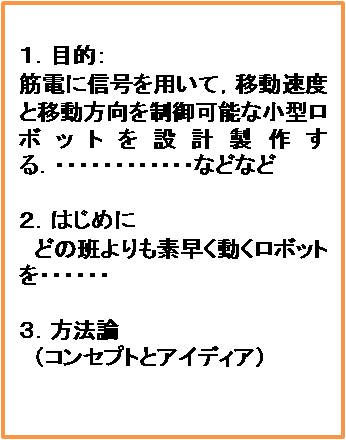
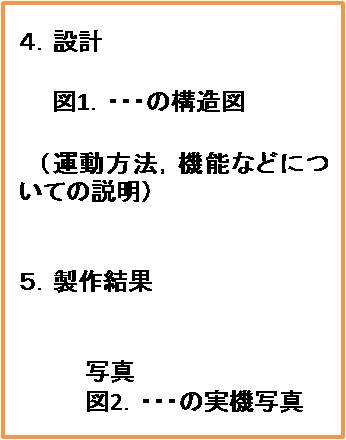
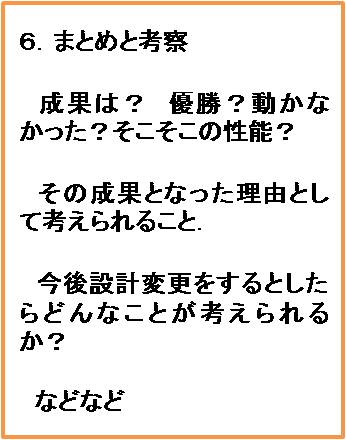
|
| 提出期限: | 7月18日(金曜日)17:00 |
| 提出方法: | メールへの添付、件名は「総合科目 精密工学・メカトロニクス入門」とすること |
| 提出先: | 下記の横井先生のアドレスへ送付 |
− 連絡先 −