-
領域プロジェクト名称 ロボカップ 4脚移動ロボットによるサッカー 最大受入人数 1名:研究室最大受入可能人数は3名 プロジェクトの狙い 新井研究室ではRoboCupの4-Legged Robot Contestに1999年より参加している.これはペット型ロボットERS-7(AIBOの新型)4台1チームでサッカーを行わせるコンテストで,ハードウェアとしては全チームが同一機器を使用し,ソフトウェア開発の点でロボットの知能を競う競技である.2005年は7月に大阪で開催される.
コンテストにはサッカー競技以外に,ロボットの知的レベルを競う RoboCup Challenge があり,また,国際会議も併設されている.
このプロジェクト参加者は,グループ内で作業を分担し,コンテストでの3位入賞のために頑張る.因みに2004年度は24チーム参加し,4つの予選リーグを構成して戦った.我がチームは残念なことに予選リーグ4位となり,上位2チームから構成される8チームでの決勝トーナメントに進出することができなかった.しかし,RoboCup Challengeでは準優勝し(一昨年は3位),大阪大会の出場権を確保した.
作業はグループ内で分担するが,本プロジェクト参加者には,「Textureデータを用いた自己位置測定」,「戦略的行動の生成」,あるいは「実世界シミュレータ」を担当する.
プロジェクトの内容 多自由度のロボットを総合的に動かすことを習得することと,特定の目標達成のアルゴリズム構築の両者をバランスよく開発するセンスをつける.
・ERS-7のプログラミング
・多センサ多自由度系の制御方法の習得
・ロボットの行動計画立案
・希望者には,RoboCup大阪大会への参加も検討する.
・RoboCupチームは,Team ARAIBOという名で,東大と中央大学との混成である.
プロジェクト開催場所 工学部14号館822号室ならびに1022号室 プロジェクト計画 4月: ERS-7の理解とプログラミング方法の習得
5月: テーマの背景となる理論の学習
6月: 実験
7月: 発表,RoboCup参加およびレポート提出
(RoboCupは2005年7月13日(水)〜19日(火)まで大阪で開催される.6月〜7月が多忙となることに注意.体力と粘り強さに自信の有る者歓迎.)
ホームページ http://www.robot.t.u-tokyo.ac.jp/~arai/lectu/2005b4/#RoboCup

試合風景 
動的計画法を用いたロボットの行動計画(ボールへの接近行動)
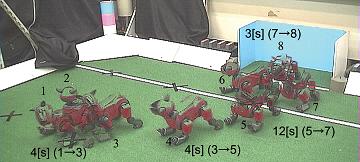
動的計画法を用いたロボットの行動計画(自己位置推定の誤差を考慮したゴールキーパーのゴールへの帰還)
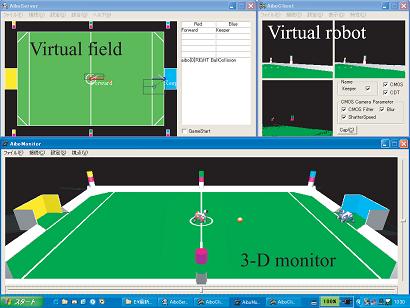
シミュレータ
研究に関連するHome Pages RoboCup 2005 公式ページ 2005年6月-7月にポルトガル・リスボンで開催されるロボカップの公式ページ 新井研究室 RoboCup 新井研究室でのロボカップ活動の説明 RoboCupの研究 ロボカップに関する研究の事例:サッカーにおける四脚ロボットの実時間行動決定
■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■
-
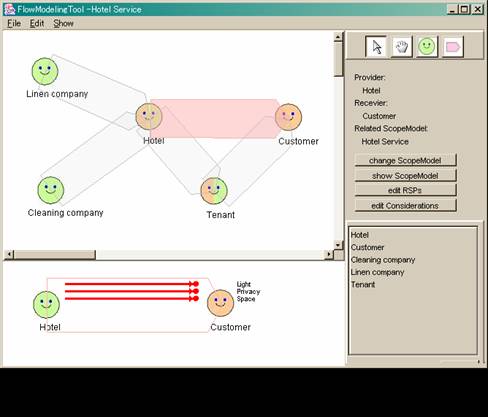
領域プロジェクト名称 サービス工学 サービスフローモデルの開発
(下村芳樹助教授@RACE との共同研究)最大受入人数 1名:研究室最大受入可能人数は3名 プロジェクトの狙い 新井教授は人工物工学研究センターのサービス工学研究部門と共に,サービス工学の研究をここ2年進めている.本テーマでは製造物の流れをChannel(サービスの供給媒体)とContents(サービスの内容)とに分離して,モデル化することを推進する.
すでに下村研究室で開発したService Explorerと既存のPetri Netとを結合させ,物の流れと情報の流れとを表現するサブモデルを構築し,そのサブモデルを結合して全体のフローモデルを表現する.これにより,サービス・シミュレータを開発し,システム構成の最適化,スケジューリング問題などを取り扱う.
これらの問題の研究を通して,マルチエージェントシステム,ネットワークプログラミングなどの技術の習得を図る.
プロジェクトの内容 今までに開発したサービス設計用ツール,自律分散型生産システムのシミュレータなどからソフトウェア開発の技法を学ぶ.スケジュール理論や最適化理論を使用する。物流実験を行って,シミュレータを検証する.
プロジェクト開催場所 14号館822号研究室を中心とし,柏総合研究棟 人工物工学研究センターでも月に1回程度の会合を持つ. プロジェクト計画 4月:研究内容の理解とシミュレータの習得
5月:Service Explorerの理解とサービスエージェントの実装
6月:サービスエージェントを多数接続した場合のシミュレーションとその評価
7月:発表およびレポート提出
ホームページ http://www.robot.t.u-tokyo.ac.jp/~arai/lectu/2005b4/#ServiceEng
研究に関連するHome Pages 人工物工学研究センター・サービス工学研究部門 サービス工学概念の紹介 ■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■
-
領域プロジェクト名称 ロボット制御における多次元パラメータの最適化手法 最大受入人数 1名:研究室最大受入可能人数は3名 プロジェクトの狙い 次元の高い最適化手法を実世界のモデル計算と共に行う実世界のシミュレーションは,計算機技術の発達と共に重要になってきた.本研究では,制御系におけるパラメータ調整を動力学モデルで実世界をシミュレートすることで行う.
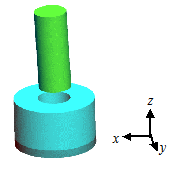
具体的な例としていままで解いている問題はつぎのようなものである.丸棒丸穴の挿入作業のように接触を伴う作業を動力学モデルとしてシミュレートし,丸棒を把持するロボットのコンプライアンス(やわらかさ)とその中心とを決定する.同様に多数の歯をもつクラッチ板とスプラインの嵌め込み作業を実現した.このようなシミュレーションを用いて,実作業のモデル化を行う.
Real Worldの特性をセンサで測定してその実データに基づいてシミュレーションを行うReal World Simulationの長所を上手に導入することで,センサが含まれた世界をシミュレートすることを目標とする.
プロジェクトの内容 最適化手法の学習と計算機情での実現
プロジェクト開催場所 14号館826号計算機室を中心とする。 プロジェクト計画 4月:研究内容の理解と動力学シミュレータの理解
5月:基礎的な実験例のプログラム化
6月:最適化手法の適用とその短時間化
7月:発表およびレポート提出
ホームページ http://www.robot.t.u-tokyo.ac.jp/~arai/lectu/2005b4/#Optim
■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■
-
領域プロジェクト名称 知的環境内でのロボットの行動生成 最大受入人数 1名:研究室最大受入可能人数は3名(テーマ) プロジェクトの狙い 誰もが簡単に使いこなせるロボットの実現には,人間の意図をロボットに伝える教示(ロボットプログラミング)と,その作業に必要な情報を予め準備する作業とが共に必要である.後者の情報収集の方法論で,予め体験して蓄積する方法は「学習」と呼ばれ,環境に利用可能な形で置く方法は「マニュアル(あるいは教科書)」とよばれる.この研究では,環境内にマニュアルに相当する情報をサイバー空間内に配置する,あるいは機械で読出し可能な形態で準備し,それらの知識を融合して,行動を生成する方法論を研究する.
既に環境内に2次元バーコードをはって,対象物の種類を短時間に測定する方法については研究を進め,システムを実現してきた.今年度は,対象物がおかれている「場所」と「時間」と「操作の履歴」から操作が変化する作業(たとえば,新聞の片付けと新聞の探索,食器を食洗機へ運ぶこととしまうこと)を実現する知識構造を研究して,実験的に検証する.
プロジェクトの内容 ネットワーク上に分散配置された知識を用いて,行動生成の行う方法論を採用する.
カメラを用いた対象物の状態の測定,2次元バーコードの読み出し,などの測定作業と,行動則のネットワーク内配置とその読み出しなどの動作測定、すなわち実演教示を構築する。作業の手順上、障害物によって対象が見えなくなっても、その動作を推定しつつ、教示を理解する。次に、得られた作業意図を実現すべく、台数・大きさ・動きの異なるロボットを用いて、実現する。
プロジェクト開催場所 14号館821号実験室を中心とする。柏総合研究棟人工物工学研究センターでの浅間教授との共同研究を進める。柏総合研究棟 人工物工学研究センターでも月に1回程度の会合を持つ. プロジェクト計画 4月:研究内容の理解とカメラ測定システムの準備
5月:知識の表現とその配置
6月:システムの構築
7月:発表およびレポート提出
ホームページ hhttp://www.robot.t.u-tokyo.ac.jp/~arai/lectu/2005b4/#Teaching