研究のモチベーション
日本の高齢者人口は25%を超え,超高齢社会となっています.高齢になると運動疾患を生じることが増え,社会保障費の増大や介護者,理学療法士などへの負担が増えています. 私は運動疾患を有する人を支援する技術や運動の教示システムの研究開発を目指しております. 実際に運動支援やリハビリテーションをするためには,基礎研究としてヒトが運動を実現するメカニズムを理解することが必要です.さらに,それを支援システムに活用することが重要で, ヒトの運動メカニズムを解明する基礎研究から,支援技術の開発まで応用研究まで幅広く研究を行っております.
研究テーマ
健常若年者の起立動作における筋シナジー構造の解明(2008年度~)
ヒトの運動機能を改善するためには,運動のメカニズムを理解することが重要です.本研究では 日常動作の起点となるヒトの起立動作を理解するため,運動を計測し現象論的に解析し,また構成論的に起立動作モデルを構築することが重要です. 特に筋シナジーと呼ばれるまとまりを持って活動する筋活動にもとづいて解析を行いました. 下肢の筋活動を計測したものでは,ヒトには4つの筋シナジーが存在し(上体の前屈・離床・伸展・姿勢制御を担当), 特に健常若年者と高齢者のシナジーを比較した研究では,高齢者では姿勢制御に相当する筋シナジーが弱まっていることが明らかになりました. またヒトがどのように異なる環境に対して適応的に運動を生成しているかを明らかにするため,異なる座面高の椅子からの立ち上がり(外部環境)と運動速度の異なる起立(内部環境)を計測しました.その結果,筋シナジーは環境間で共通するものの,その活性重みを変化させることで適応的な動きを達成していることが新たに分かりました. 構成論的にヒトの筋骨格モデルを構築したものでは,実際に下肢の筋を個別に制御しなくても,4つの筋シナジーを制御することでヒトの起立動作が生成されることがわかりました.
- Kazunori Yoshida, Qi An, Hiroyuki Hamada, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, and Hajime Asama, "Analysis of muscle activity of Sit-to-stand motion when knee movability is disturbed", Journal of Robotics and Mechatronics, vol. 34, no. 4, pp. 767-776, 2022. [link]
- Kazunori Yoshida, Qi An, Hiroyuki Hamada, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, and Hajime Asama, "Artificial neural network that modifies muscle activity in sit-to-stand motion using sensory input", Advanced Robotics, vol. 35, pp. 858-866, 2021. [pdf][link]
- Kazunori Yoshida, Qi An, Arito Yozu, Ryosuke Chiba, Kaoru Takakusaki, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, and Hajime Asama, "Visual and Vestibular Inputs Affect Muscle Synergies Responsible for Body Extension and Stabilization in Sit-to-Stand Motion", Frontiers in Neuroscience, vol. 12, Article 1042, doi: 10.3389/fnins.2018.01042, 2018. [link]
- Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama, "Muscle Synergy Structure using Different Strategies in Human Standing-up Motion", Advanced Robotics, Vol.31, No.1, January 2017. [pdf][link]
- Qi An, 石川雄己, 舩戸徹郎, 青井伸也, 岡敬之, 山川博司, 山下淳, 淺間一, 座面高と速度の異なるヒト起立動作における筋シナジー解析, 計測自動制御学会論文集, vol. 50, no. 8, pp. 560-568, 2014 (計測自動制御学会論文賞受賞). [pdf][link]
- Qi An, Yusuke Ikemoto, and Hajime Asama, "Synergy Analysis of Sit-to-Stand in Young and Elderly People", Journal of Robotics and Mechatronics, vol. 25, no. 8, pp. 1038-1049, 2013. [pdf][link] Qi An, Yuki Ishikawa, Shinya Aoi, Tetsuro Funato, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Muscle Synergy Contribution on Human Standing-up Motion Using Human Neuro-Musculoskeletal Model", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp.5885-5890, Seattle (USA), May 2015. [pdf][link]
片麻痺患者の起立動作における筋シナジー構造の解明と理学療法士の技能解析(2015年度~)
本研究は森ノ宮病院と理化学研究所と共同して行ったもので,片麻痺患者の筋シナジー構造の同定と理学療法士の介入によって運動がどのように変化するかを調査しました.片麻痺患者では特に離臀を担う筋シナジー2の活動が遅くなったり,長くなったりする現象が見られました. 一方で理学療法士が臀部と膝部に介入を行うことで,立ち上がりがスムーズになり,筋シナジー2の活動も改善することが分かりました. さらに,この筋シナジーの活動タイミングによって方麻痺患者の重症度の診断に活用できることや,回復過程が患者ごとに変化していることが分かりました.この知見は今後支援システムの開発に応用していく予定です.
- Hiroshi Yamasaki, Qi An, Koji Takahashi, Takanori Fujii, Ningjia Yang, Matti Itkonen, Moeka Yokoyama, Fady S.K. Alnajjar, Hironori Otomune, Noriaki Hattori, Ichiro Miyai, and Shingo Shimoda, "Evaluating the Impact of Therapeutic Handling on Sit-to-Stand Movements Post-Stroke: Kinematic Smoothness as a Monitoring Metric for Recovery", Journal of Bodywork and Movement Therapies, vol. 42, pp. 620-628, 2025. [link]
- Ruoxi Wang, Qi An, Ningjia Yang, et al., "Clarify sit-to-stand muscle synergy and tension changes in subacute stroke rehabilitation by musculoskeletal modeling", Frontiers in Systems Neuroscience, vol. 16, pp. 1-16, 2022. [pdf]
- Hiroki Kogami, Qi An, Ningjia Yang, et al., "Analysis of muscle synergy and kinematics in sit-to-stand motion of hemiplegic patients in subacute period", Advanced Robotics, vol. 35, pp. 867-877, 2021. [pdf]
- Ningjia Yang, Qi An, Hiroki Kogami, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady Shibata-Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama, "Temporal muscle synergy features estimate effects of short-term rehabilitation in sit-to-stand of post-stroke patients", IEEE Robotics and Automation Letter, vol. 5, no. 2, pp. 1796-1802, 2020. [link]
- Ningjia Yang, Qi An, Hiroki Kogami, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady S. Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita, and Hajime Asama, "Temporal features of muscle synergies in sit-to-stand motion reflect the motor impairment of post-stroke patients", IEEE Transaction on Neural Systems and Rehabilitation Engineering, vol. 27, no. 10, pp. 2118-2127, 2019. [pdf][link]
- Hiroshi Yamasaki, Qi An, Makoto Kinomoto, Koji Takahashi, Takanori Fujii, Hiroki Kogami, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Matti Itkonen, Moeka Sonoo, Fady Alnajjar, Atsushi Yamashita, Hironori Otomune, Noriaki Hattori, Hajime Asama, Ichiro Miyai, and Shingo Shimoda, "Organization of functional modularity in sitting balance response and gait performance after stroke", Clinical Biomechanics, vol. 67, pp. 61-69, 2019. [link]
- Hiroki Kogami, Qi An, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Hajime Asama, Shingo Shimoda, Hiroshi Yamasaki, Matti Itkonen, Fady Alnajjar, Noriaki Hattori, Makoto Kinomoto, Kouji Takahashi, Takanori Fujii, Hironori Otomune and Ichiro Miyai, "Effect of Physical Therapy on Muscle Synergy Structure during Standing-up Motion of Hemiplegic Patients", IEEE Robotics Automation Letter. [link]
- Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Matti Itkonen, Fady Alnajjar, Shingo Shimoda, Hajime Asama, Noriaki Hattori and Ichiro Miyai, "Clarification of Muscle Synergy Structure During Standing-Up Motion of Healthy Young, Elderly and Post-Stroke Patients", Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), pp. 19-24, London (UK), July 2017. [pdf][link]
パーキンソン病のメカニズム解明と診断システムの開発(2024年度~)
本研究は順天堂大学付属医院と共同で研究をしています.パーキンソン病とは脳の変性疾患で,無動や手足の震えといった症状が出ます.症状には日内変動があり,また進行性の病気であります.そのため,このパーキンソン病のメカニズムを理解し,日常的に使用できる診断システムを構築することは重要です.本研究ではモーションキャプチャや筋電図の計測や解析に加え,インソール型の圧センサを活用することで,症状の出現や進行状況を診断したり予測するシステムの構築を目指しております.
- Rukiye Aydin, Hiroyuki Hamada, Ken Kikuchi, Shingo Shimoda, Yoshihiro Kameyama, Kazunori Sato, Daiki Kamiyama, Eriko Kitahara, Atsushi Yamashita, Tomokazu Shimazu, Genko Oyama, Toshiyuki Fujiwara and Qi An: "Ground Reaction Forces in Parkinson's Disease OFF and ON States Reflect Changes in Muscle Synergies: A Pilot Study", 6th International Conference on NeuroRehabilitation (ICNR2024), , pp. 188-192, December 2024.
運動機能を診断する福祉用具システムの開発(2019年度~)
自分自身の運動機能を把握したり,運動機能が将来どのように変化するかを知ることは重要です.モーションキャプチャや筋電図は運動に関する詳細な情報を与えてくれますが,設置場所の制限や価格の問題があり,日常的に使用することは困難です.そこで本研究では,運動障害を有する人が手すりなどの福祉用具に依存していることに着目し,福祉用具にかかる力が大きいほど運動機能が低下しているのではないかという仮説を立てました.起立動作中にかかる力を計測可能な手すりを開発し,その情報から運動障害の度合いや,1ヶ月後に運動機能がどう変化するかを調べるシステムを構築しています.これによって,手すりを持って立つだけで,運動機能を診断できるようになります.
- 若松宥太,菊地謙,濵田裕幸,中山和洋,三好敢太,山下淳,安琪,起立動作中に手すりにかかる力を用いた高齢者の下肢関節トルクの推定,計測自動制御学会システム・情報部門学術講演会2024(SSI2024),pp. 169-173,富山,2024年11月(SSI優秀論文賞 受賞)
- Qi An, Ningjia Yang, et al., "Classification of Motor Impairments of Post-stroke Patients based on Force Applied to a Handrail", IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 2399-2406, 2021. [pdf][link]
- Ryoya Kihara, Qi An, Kensuke Takita, Shu Ishiguro, Kazuto Nakashima, Ryo Kurazume, "Analysis of Force Applied to Horizontal and Vertical Handrails with Impaired Motor Function", Proceedings of 2023 IEEE/SICE International Symposium on System Integration (SII), Atlanta, USA, pp.1-6, 2023/Jan.
- 木原諒也,安琪,滝田謙介,石黒周,中山和洋,三好敢太,中嶋一斗,倉爪亮,起立動作中に手すり・臀部・足底部にかかる力を用いた高齢者の体力測定データの評価,第24回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2023),pp. 3076-3081,新潟,2023年12月.
- 安琪,山川博司,湖上碩樹,吉田和憲,王若曦,山下淳,淺間一,楊濘嘉, 横山萌香,下田真吾,Fady Alnajjar,山崎弘嗣,石黒周,服部憲明,高橋幸 治,藤井崇典,乙宗宏範,宮井一郎,倉爪亮,起立動作中の縦手すりにかかる力 を用いた運動機能の評価,LIFE2020-2021,pp. 114-116, オンライ ン,2021年09月.
- Qi An,山川博司,湖上碩樹,吉田和憲,王若曦,山下淳,淺間一,石黒周,下田真吾, 楊濘嘉,山崎弘嗣,園尾萌香, Alnajjar Fady,服部憲明,高橋幸治,藤井崇典,乙宗宏範,宮井一郎,倉爪亮,片麻痺患者の起立動作中の手すりにかかる力を用いた運動障害の度合の分類,第38回日本ロボット学会・学術講演会論文集(RSJ2020), 2H2-02,オンライン,2020年10月.
- Qi An,山川博司,楊濘嘉,湖上碩樹,吉田和憲,山下淳, 石黒周, 下田真吾,山崎弘嗣,園尾萌香,Fady S. Alnajjar,木野本誠,服部憲明,高橋幸治,藤井崇典,乙宗宏範,宮井一郎,淺間一,片麻痺患者の起立動作における縦手すりにかかる力の解析, 計測自動制御学会 システム・情報部門 学術講演会2019(SSI2019),千葉,2019年11月.
高齢者の起立動作アシストシステム(2021年度~)
日常生活において運動機能を改善するためには,使用者の運動能力に合わせて支援の度合いを調整し,必要最小限の支援をすることが重要です.本研究では,大掛かりな装置を使うのではなく,軽量で小さい装置を組み合わせて動作の要所(コツ)のみを教示することで,運動を支援し,自己効力感を高めることを目指しています.本研究は理化学研究所や京都大学と共同で,ウェアラブルスーツによる運動意図や運動能力の推定を行い,椅子型の支援装置や軽量な外骨格ロボットによって起立動作を支援するシステムを開発しています.
- Julian Ilham, Yuichi Nakamura, Takahide Ito, Kazuaki Kondo, Jun-ichiro Furukawa, Qi An, and Kei Shimonishi, "Time Series Prediction of Sit-To-Stand Muscle Synergy Using Deep Learning", Proceedings of IEEE/SICE International Symposium on System Integration (SII2025), Munich, Germanay, January 2025.
- Julian Ilham, Yuichi Nakamura, Takahide Ito, Kazuaki Kondo, Qi An, Junichi Akita and Masashi Toda, "Improving repeatability of surface electromyography measurement of sit-to-stand motions by using muscle synergy", Biomedical Signal Processing and Control, vol. 93, Article 106185, 2024. [link]
- 早瀬瑞華,菊地謙,古川淳一朗,井藤隆秀,森本淳,中村裕一,淺間一,山下淳,安琪,起立動作中の筋力モビリティ楕円体を考慮した支援椅子の座面制御法の開発,2024年度精密工学会春季大会学術講演会,pp. 452-453,東京,2024年03月(ベストプレゼンテーション賞受賞).
- 早瀬瑞華,菊地謙,古川淳一朗,井藤隆秀,森本淳,中村裕一,淺間一,山下淳,安琪,加齢が起立動作中の筋力モビリティ楕円体に与える影響の解析と支援椅子の座面制御法への応用,第33回ライフサポート学会フロンティア講演会予稿集,p. 49,埼玉,2024年03月(ライフサポート学会奨励賞 受賞).
- 早瀬瑞華,菊地謙,古川淳一朗,井藤隆秀,森本淳,中村裕一,淺間一,山下淳,安琪,加齢が起立動作中の筋力モビリティ楕円体に与える影響,第24回計測自動制御学会システムインテグレーション部門講演会(SI2023),pp. 3004-3006, 新潟,2023年12月.
- Takahide Ito, Jun-Ichiro Furukawa, Qi An, Jun Morimoto, and Yuichi Nakamura, "Muscle Synergy Analysis Under Fast Sit-to-stand Assist : A Preliminary Study", pp. 320-322, Proceedings of Augmented Humans 2023, March 2023.
- Jun-ichiro Furukawa, Shotaro Okajima, Qi An, Yuichi Nakamura, and Jun Morimoto, “Selective assist strategy by using lightweight carbon frame exoskeleton robot”, IEEE Robotics and Automation Letter, vol. 7, no. 2, pp. 3890 - 3897, 2022. [link][pdf]
- Yamato Kuroda, Qi An, Hiroshi Yamakawa, Shingo Shimoda, Jun-ichiro Furukawa, Jun Morimoto, Yuichi Nakamura, Ryo Kurazume, "Development of a Chair to Support Human Standing Motion -Seat movement mechanism using zip chain actuator-", Proceedings of 2022 IEEE/SICE International Symposium on System Integration (SII), ONLINE, pp.555-560, January 2022.
- 黒田大登,安琪,山川博司,下田真吾,古川淳一朗,森本淳,中村裕一,倉爪亮,ヒトの起立動作を支援する椅子の開発~ジップチェーンアクチュエータを用いた座面の移動機構~,第39回日本ロボット学会学術講演会(RSJ2021),1J2-02,オンライン,2021年09月.
運動障害を有する幼小児の運動機能を改善するロボットシステム(2020年度~)
成人と違って子どものリハビリテーションにはいくつか困難な点があります.例えば,成長に伴って体格が変化することや,また発達の過程で獲得する身体図式の形成が十分ではなく,運動技能の再獲得(リハビリテーション)ではなく,新たに運動技能を習得することが求められます(ハビリテーション).このようなお子さんの運動機能を回復するために,本研究では理学療法士が実践する徒手による介入技能に注目し,この介入によって身体に感覚情報を与えることで運動機能を改善しているのではないかと仮説を立てました.実際に理学療法士が行う介入技能を計測して,それが運動に与える効果を評価し,さらにそれを再現するような支援機器の開発を目指しています.これによって異なる体格に合わせ,かつ在宅でもリハビリテーションができるようなシステムを開発しています.
- 陳童,菊地謙,濵田裕幸,氷上隆三,山下淳,安琪,理学療法士が足底部への介入技能を再現する刺激装置の開発ー刺激力の再現と検証ー,第37回自律分散システム・シンポジウム資料,pp. 149-150,山口,2025年01月.
- Yuki Uchiyama, Ken Kikuchi, Hiroyuki Hamada, Tadamitsu Matsuda, Atsushi Yamashita and Qi An: "Effects of Manual Therapy on Joint Angle during Functional Reach Test in Children with Cerebral Palsy", 6th International Conference on NeuroRehabilitation (ICNR2024), pp. 94-98, December 2024, November 2024.
- Qi An, Hiroyuki Hamada, Shigeki Maruta, Yuki Abe, Kenichi Takada, Ken Kikuchi, Hiroshi Yamakawa, Hajime Asama, and Atsushi Yamashita, "Pneumatic plantar stimulation device replicating manual therapy improves lateral stability in standing posture", Journal of Robotics and Mechatronics, vol. 36, no. 4, pp. 813-822, 2024. [link]
- 古賀洋平,安琪,倉爪亮,理学療法士の介入技能を再現する足底部の刺激装置の開発,日本機械学会ロボティクスメカトロニクス講演会2023,1A1-E04,愛知,2023年06月.
- 古賀洋平,安琪,倉爪亮,幼児の足底部への理学療法士の介入技能の解析と立位姿勢中の足底圧中心・筋電位に与える影響の評価,LIFE2022,1P1-A4, 2022年08月.
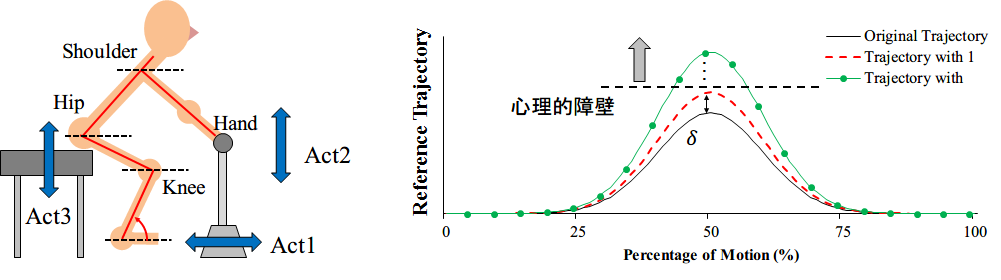
自己効力感を利用した最小不可知差異に基づくアシストシステムの設計(2012年度)
高齢者などの身体機能を回復するには,心理的障壁を克服し,自分が動作を達成できるという感覚(自己効力感)が必要です. リハビリなどの現場では,心理的障壁によって本来の機能を十分に発揮できないことがあります. そのため本研究では,アシスト装置の軌道を徐々に被験者が気づかない範囲(最小可知差異)で徐々に変化させることで自然と心理的障壁を乗り越え,自己効力感を与えるシステムを提案しました.
- Qi An, Yuki Ishikawa, Junki Nakagawa, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama, "Measurement of Just Noticeable Difference of Hip Joint for Implementation of Self-efficacy: In Active and Passive Sensation and Different Speed", Advanced Robotics, vol. 28, no. 7, pp. 505-515, 2014. [pdf][link]
ボートのローイング動作の運動教示システム(2013-2014年度)
ボートのローイング動作を対象に,非熟練者が運動技能を向上させることを目指しています.熟練者と非熟練者の差を運動技能として抽出し,それを教示するシステムを構築しました. 実際には下記の動画のように,運動中の筋活動を可視化し,リアルタイムに提示するシステムを作成しました. これによって熟練者の動きを記録して,教材として使用したり,非熟練者が自分自身の運動を確認するために使うことができます.
- Qi An, 柳井香史朗, 中川純希, 温文, 山川博司, 山下淳, 淺間一, 実映像と筋活動の重畳表示によるローイング動作教育システム, 日本機械学会論文集, Vol.82, No.834, 15-00424, pp.1-11, 2016. [pdf][link]
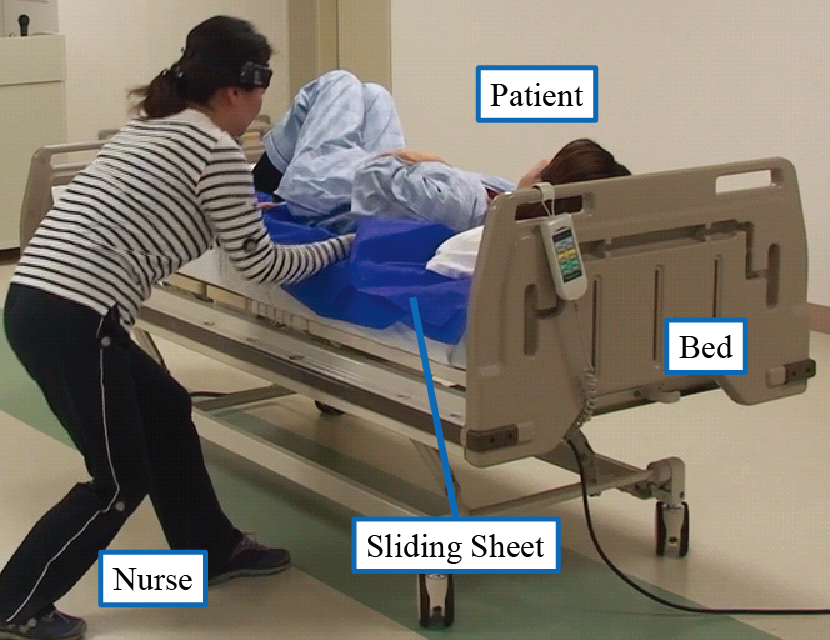
スライディングシートを用いた介護動作の技能抽出(2013-2014年度)
寝たきりの患者に対して,褥瘡などを防ぐために姿勢変換をすることは重要です. しかし姿勢変換を人力で行うと腰痛などを引き起こすことがあり,スライディングシートと呼ばれるシートを使って体位を変換します. 本研究では熟練者がシート引き動作を行う際の技能を抽出し,それを非熟練に教示することで運動学習の効果が上がるかどうか検証しました.
- 中川純希, Qi An, 石川雄己, 柳井香史朗, 保田淳子, 温文, 山川博司, 山下淳, 淺間一, シートを使ったベッド上介助動作における技能教示サービスシステムの提案, サービス学会第3回国内大会講演論文集, pp. 323-324, 金沢, 2015年4月.
- Junki Nakagawa, Qi An, Yuki Ishikawa, Koshiro Yanai, Wen Wen, Hiroshi Yamakawa, Junko Yasuda, Atsushi Yamashita, and Hajime Asama, "Extraction and Evaluation of Proficiency in Bed Care Motion for Education Service of Nursing Skill", Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp. 91-96,Yokohama, Japan, 2014/Sep. [pdf]
義肢開発のための振動触覚刺激を用いた力情報フィードバックシステムの開発(2011年度)
従来の義手使用者は物体操作をする際に指先にかかる力を知ることができず,義手を十分に活用できませんでした.本研究では振動触覚フィードバック用い,指先にかかる力を振動を通して,非侵襲で安全にユーザーに提示するデバイスを開発しました. 仮想空間を構築し,実際に人が振動触覚刺激を通じて指先力を知覚し,仮想空間上での物体操作を行えるか評価を行いました.2週間に渡るトレーニングを通して,人は十分に触覚振動刺激から力情報を学習して,物体操作を行う精度が向上しました. また実空間上でも,同様の振動触覚刺激の提示デバイスを用いて,実際の物体操作を行えるか検証しました. 結果として,腕に付着させた1つの触覚振動デバイスという非常に安全でかつ単純な方法で人は有意に物体の操作性を向上させることができ,提案手法の有効性が示されました.
- Cara, E. Stepp, Qi An, and Yoky Matsuoka, "Repeated Training with Augmentative Vibrotactile Feedback Increases Object Manipulation Performance", PLoS ONE, 7(2), e32743, 2012. [pdf][link]
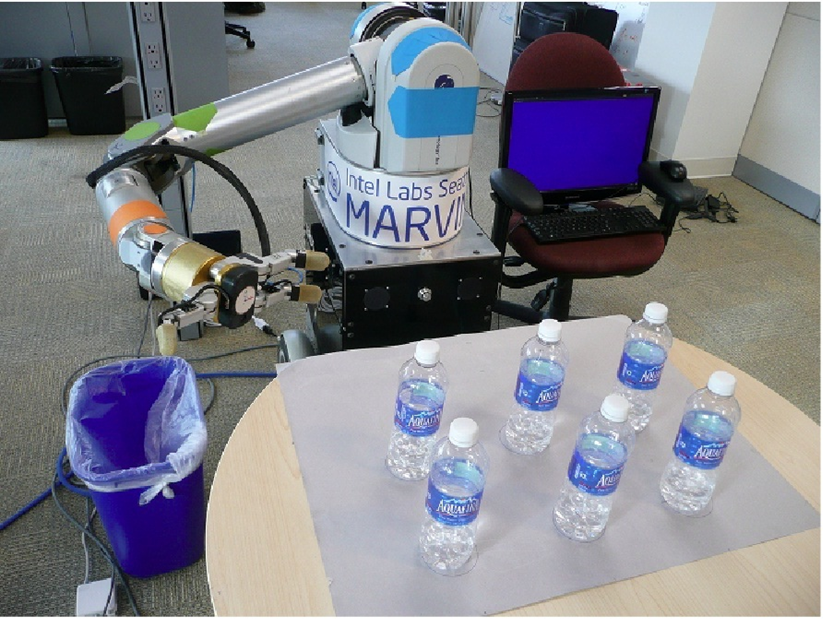
音声認識システムを利用したロボットマニピュレータの制御(2011年度)
全身麻痺患者のように手足の不自由な人を支援することを目的とした音声によるロボットマニピュレーターの制御方法の開発を行いました. 本研究では,複数の母音と音の高低,撥音の合計7自由度の入力を用いた制御を行い,異なる制御として1. 単関節制御,2. 終点位置制御,3. 複数関節協同制御の3つの制御則のパフォーマンスを比較しました. ボトルを机の上から掴み,0.5 mほど離れたゴミ箱に捨てる,6本のペットボトルが入ったバッグを1.0 mほど離れた机に運搬する,倒れているボトルを垂直に立てるという異なる実験環境において試行し,それぞれの制御則のパフォーマンスを比較しました. 結果として,被験者は単関節制御と複数関節協同制御に関して終点位置制御よりも,作業時間と成功率の観点で有意な結果を示しました.


- Mike Chung, Eric Rombokas, Qi An, Yoky Matsuoka, Jeff Bilmes, "Continuous Vocalization Control Of A Full-Scale Assistive Robot", Proccedings of IEEE International Conference on Biomedical Robotics and Biomechatronics 2012 (BioRob 2012), pp. 1464-1469, Rome, Italy, 2012/Jun. [pdf]
研究の設備
我々の研究グループでは,ヒトの運動を解析したり,アシスト装置の評価や制御に使える実験装置が揃っています. バイオメカニクスの研究では三種の神器とも言える,モーションキャプチャシステム,床反力計,筋電計を主に使用して研究を進めています.
光学式モーションキャプチャシステム
人の身体運動を計測するための光学式モーションキャプチャシステムがあります. 合計11台のカメラで,運動を計測することができます. 赤外線を反射するマーカを身体に貼り付けることで,そのマーカの空間上での3次元位置を計測することができます. またキャリブレーション不要のモーションキャプチャシステムを使っています. 死角があり,万能ではないのですが,キャリブレーションの手間が省けます. SDKも公開されているので,運動に合わせてフィードバックをすることも可能です.


床反力計
床反力計は3枚持っております.3枚の床反力計で,左右の足と臀部の床反力をそれぞれ計測することができます. 力は6軸(力+モーメント)を計測でき,圧中心なども分かります. 大きな床反力計の垂直方向の容量は10,000 Nで,ジャンプなどのスポーツ動作も計測可能です. 歩行動作のように床反力計から外れた運動を対象とする時は無線のフットセンサを使います.

筋電計
2種類の無線の筋電計を持っております(CometaとDelsys). Cometaの筋電計では32ch分の筋を計測することができます. 32chと聞くと多いようですが,片麻痺患者のように左右の運動が非対称の時などに活躍します. また上肢と体幹を合わせて計測する時などにも使います. 32ch全部使う時には電極を1袋丸々使い切ります… Delsysの筋電計は現在増やしている最中です.新たな実験系のために使用します. 最大で48chの無線筋電計を有しております. 他にも有線の筋電計を16ch分持っています.これは私が博士課程で使用したものでした. 今までもチャンネル数が足りないときには,これの出番です.