.
Japanese

/ English

サービスロボティクス分野の研究内容
Research Subject
開始日: 2017年04月03日
更新日: 2017年04月10日
サービスロボティクス分野の研究の目指すところ
Goal of our research on service robotics
サービスロボティクス分野では,高齢化,安全・安心などの社会的問題を解決し社会ニーズに応えるためのサービスロボティクス研究,新たな価値を創造するためのサービスロボティクス研究を行っています.
Make research on service robotics to meet the social needs by solving societal problems such as aging, safety, etc. and to create new value.
 |
 |
| 日本語版 |
English Version |
具体的な研究テーマは以下の通りです.
Research subjects are shown as follows:

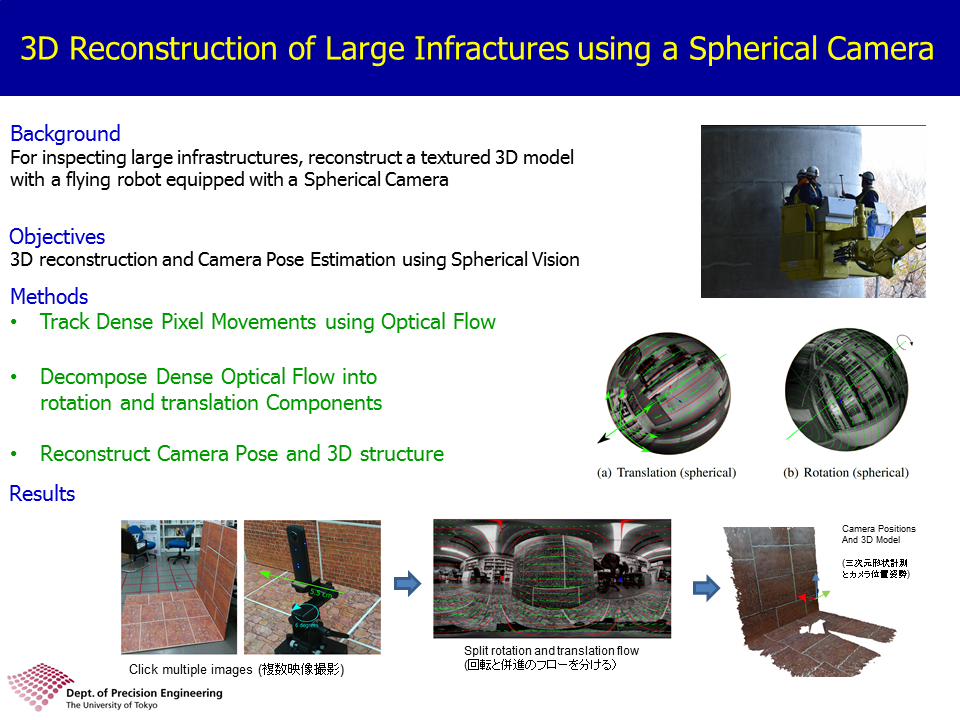
3D Reconstruction of Large Infrastructures Using a Spherical Camera
 |
山下研究室
Sarthak Pathak |
 |
| English Version |
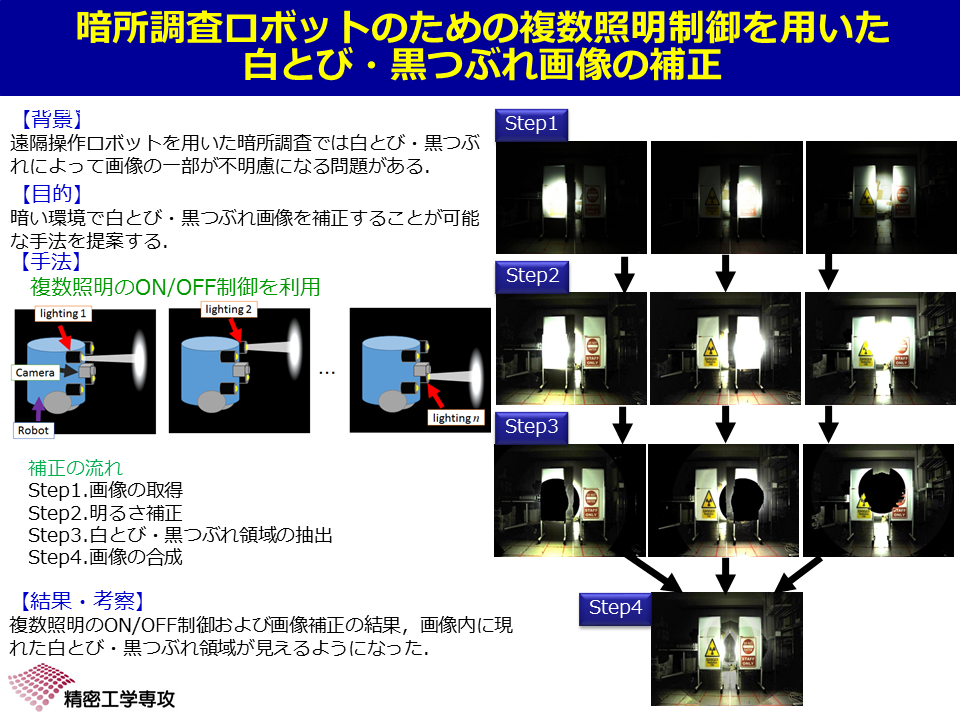
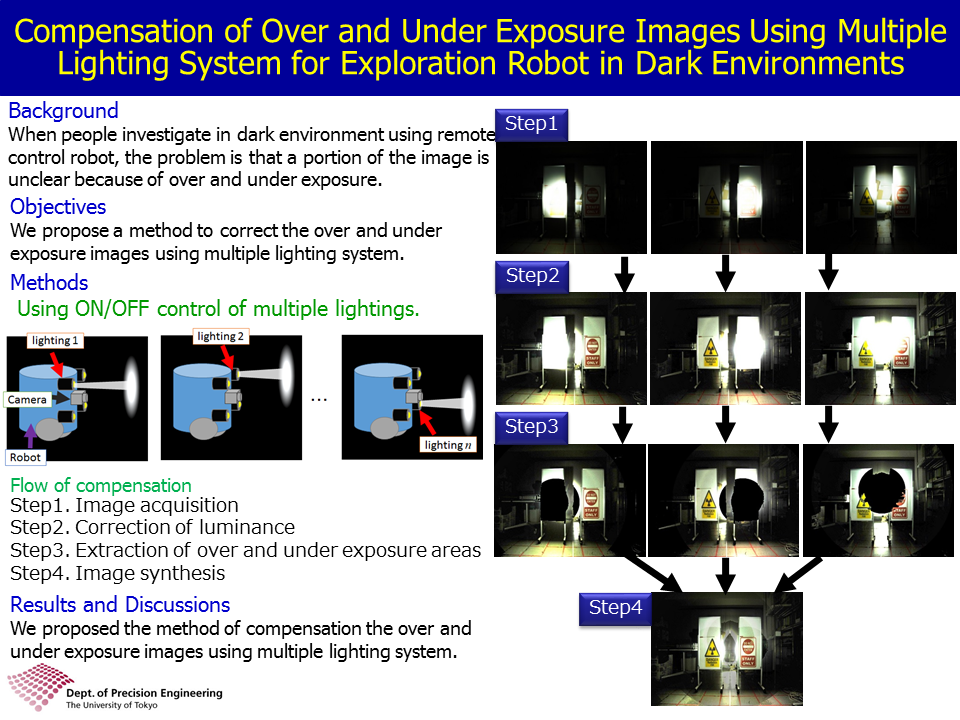
Compensation of Over and Under Exposure Images Using Multiple Lighting System for Exploration Robot in Dark Environments
 |
山下研究室
林 鍾勳
Jonghoon Im |
 |
 |
| 日本語版 |
English Version |
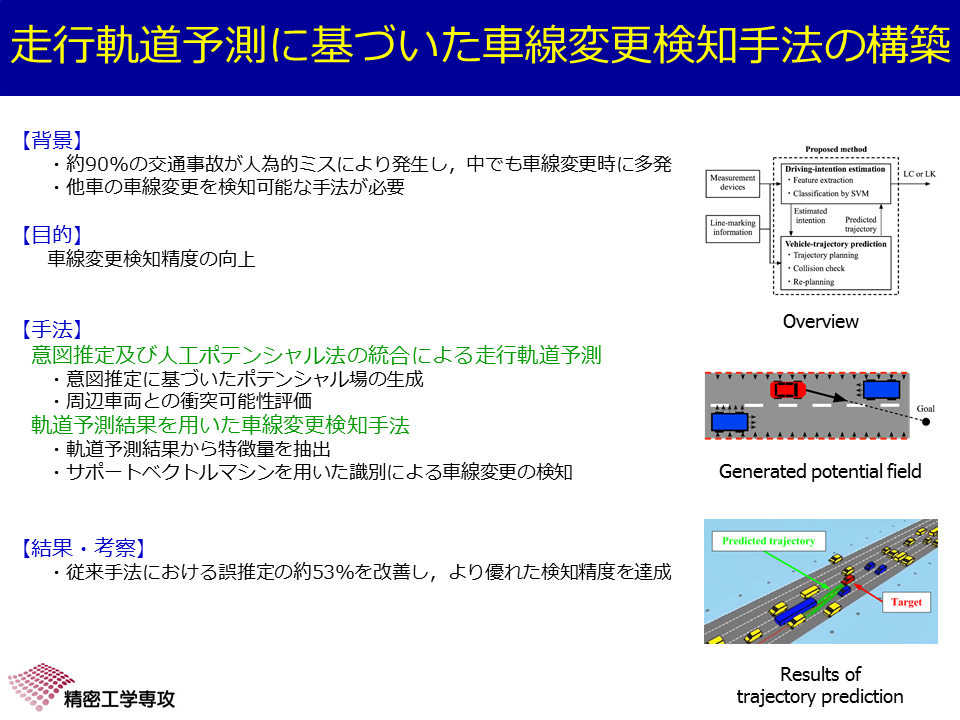
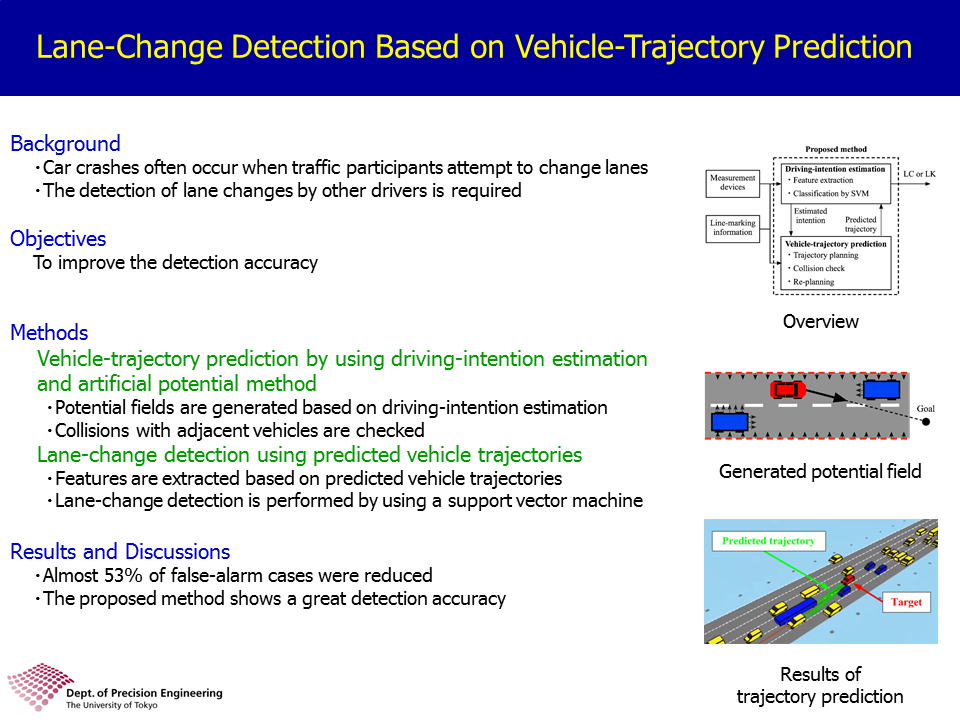
Lane-Change Detection Based on Vehicle-Trajectory Prediction
 |
山下研究室
禹 ハンウル
Hanwool Woo |
 |
 |
| 日本語版 |
English Version |
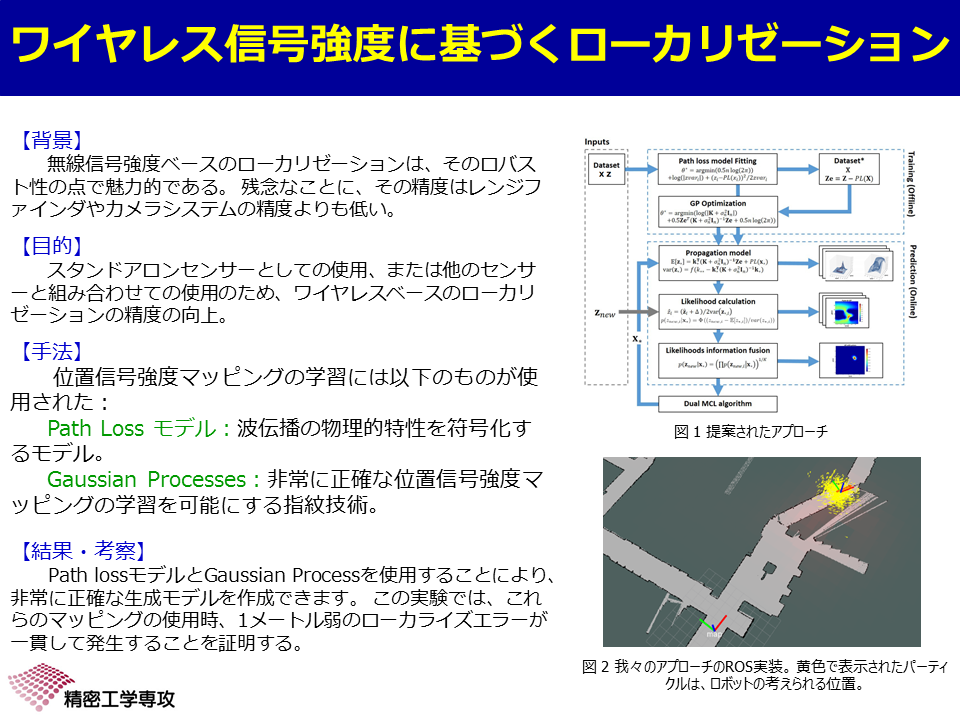
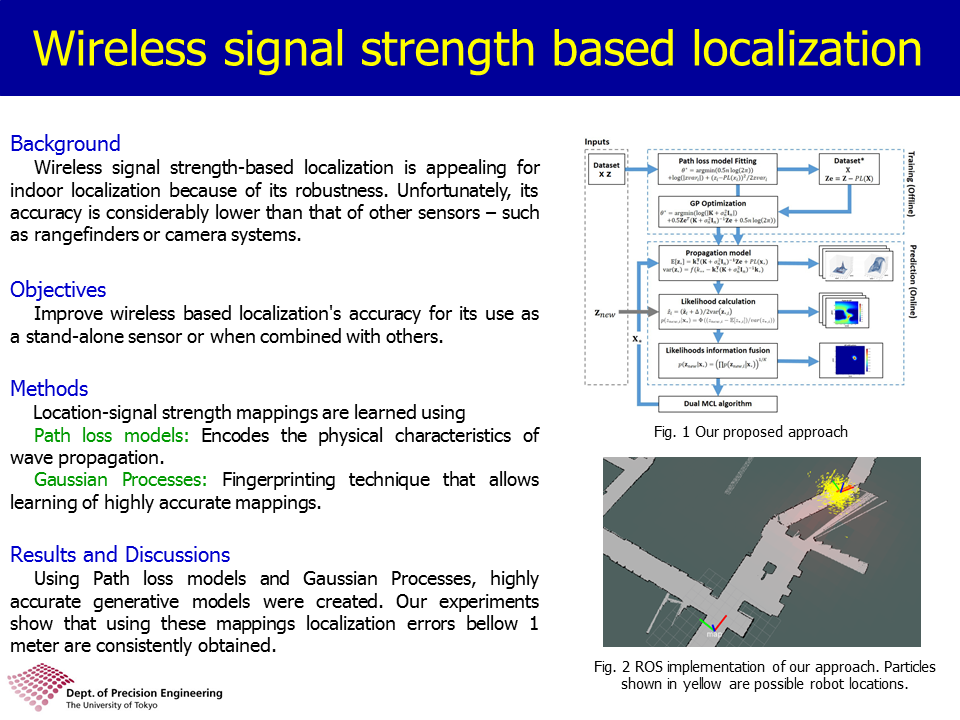
Wireless Signal Strength based Localization
 |
淺間研究室
Renato Miyagusuku |
 |
 |
| 日本語版 |
English Version |
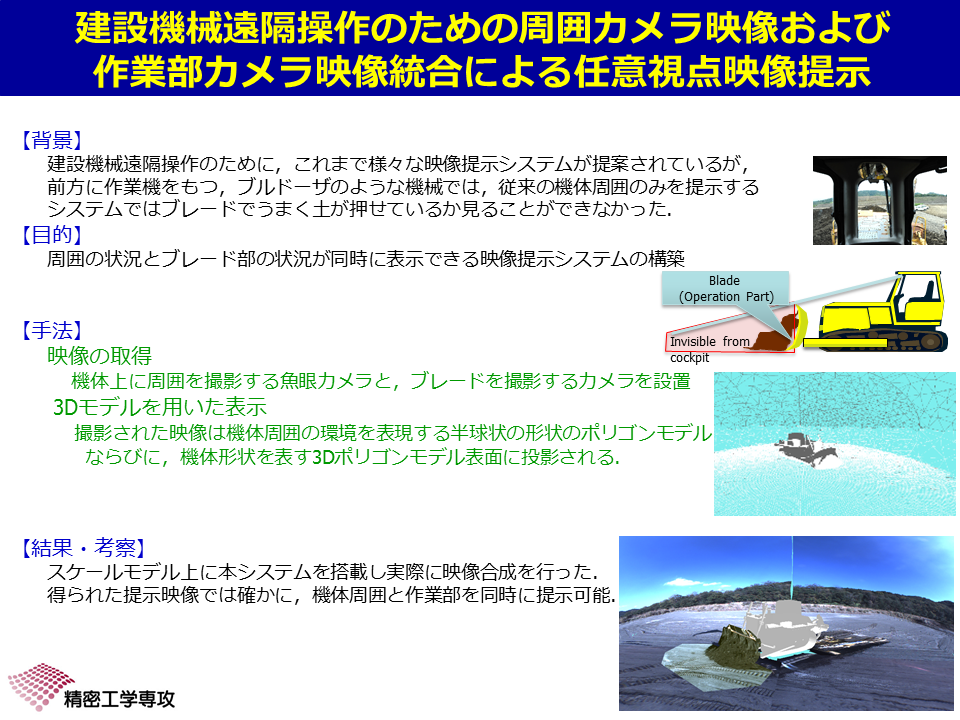
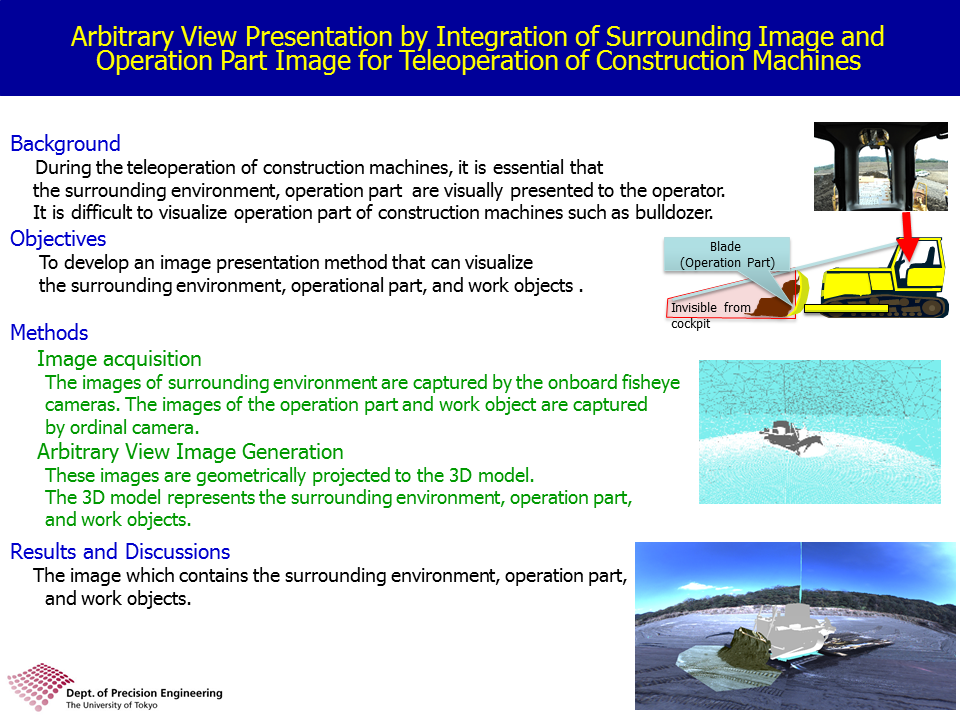
Arbitrary View Presentation by Integration of Surrounding Image and Operation Part Image for Teleoperation of Construction Machines
 |
山下研究室
岩滝 宗一郎
Soichiro Iwataki |
 |
 |
| 日本語版 |
English Version |
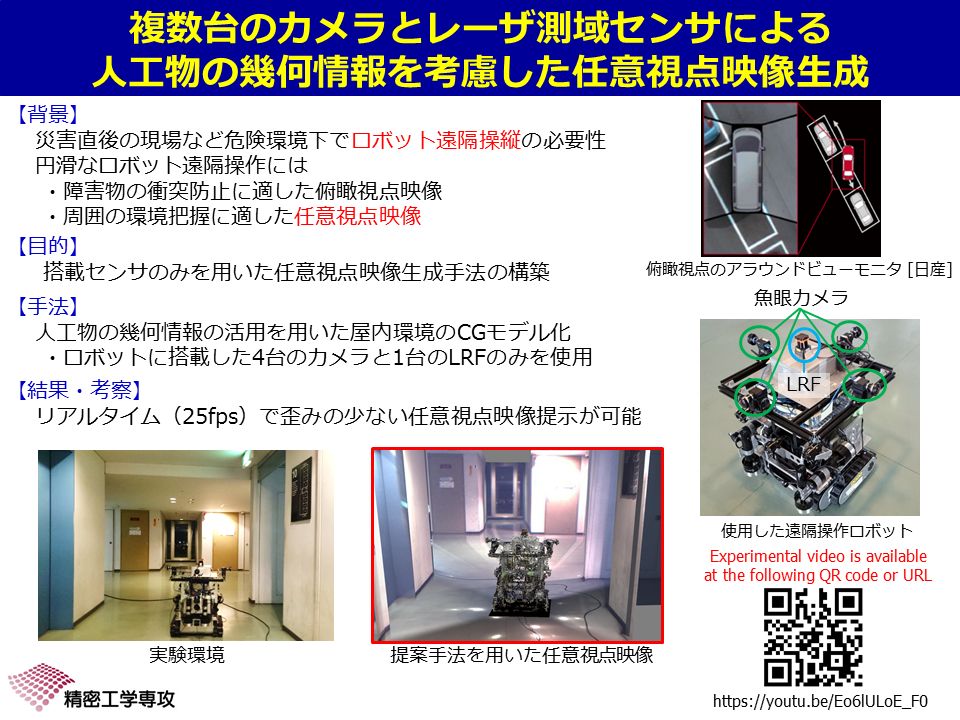
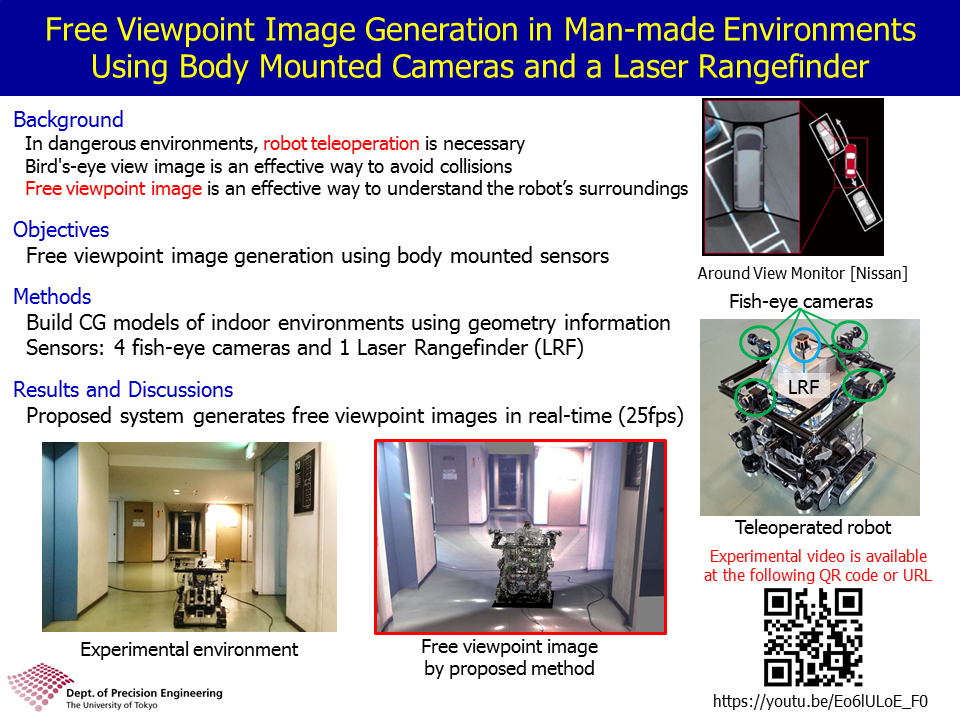
Free Viewpoint Image Generation in Man-made Environments Using Body Mounted Cameras and a Laser Rangefinder
 |
山下研究室
小松 廉
Ren Komatsu |
 |
 |
| 日本語版 |
English Version |
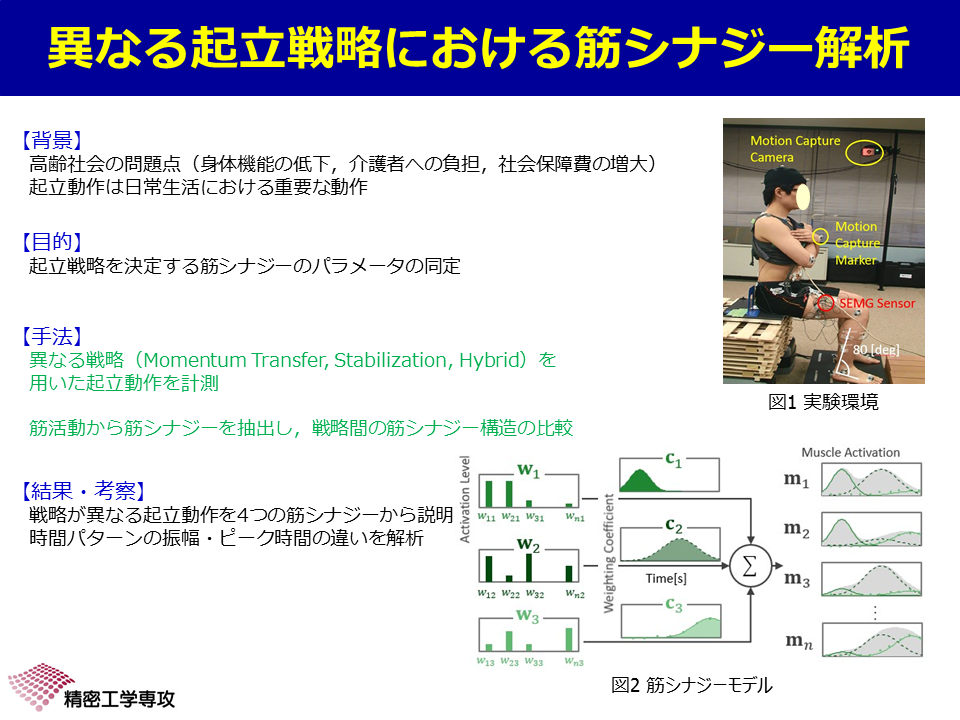
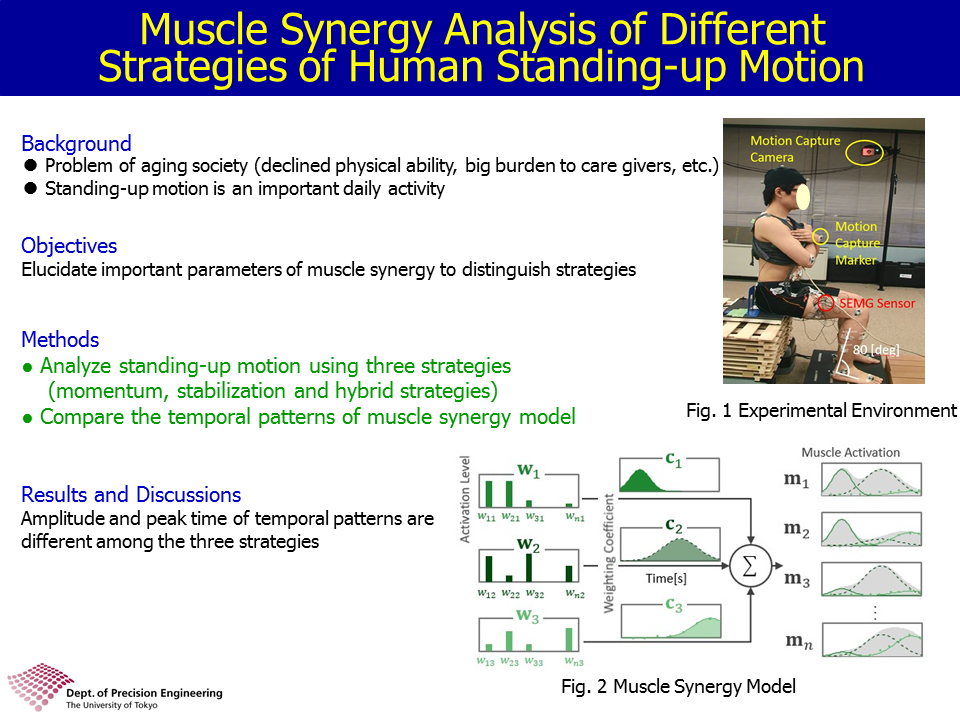
Clarification of Muscle Synergy Structure in Different Human Standing-up Strategies
 |
淺間研究室
楊 濘嘉
Ningjia Yang |
 |
 |
| 日本語版 |
English Version |
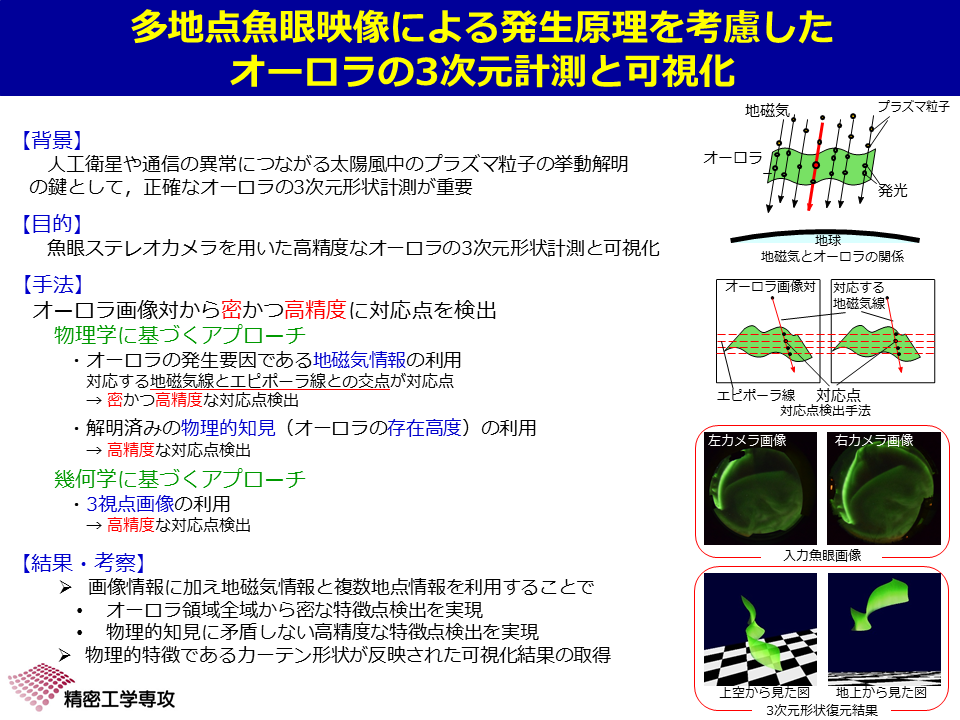
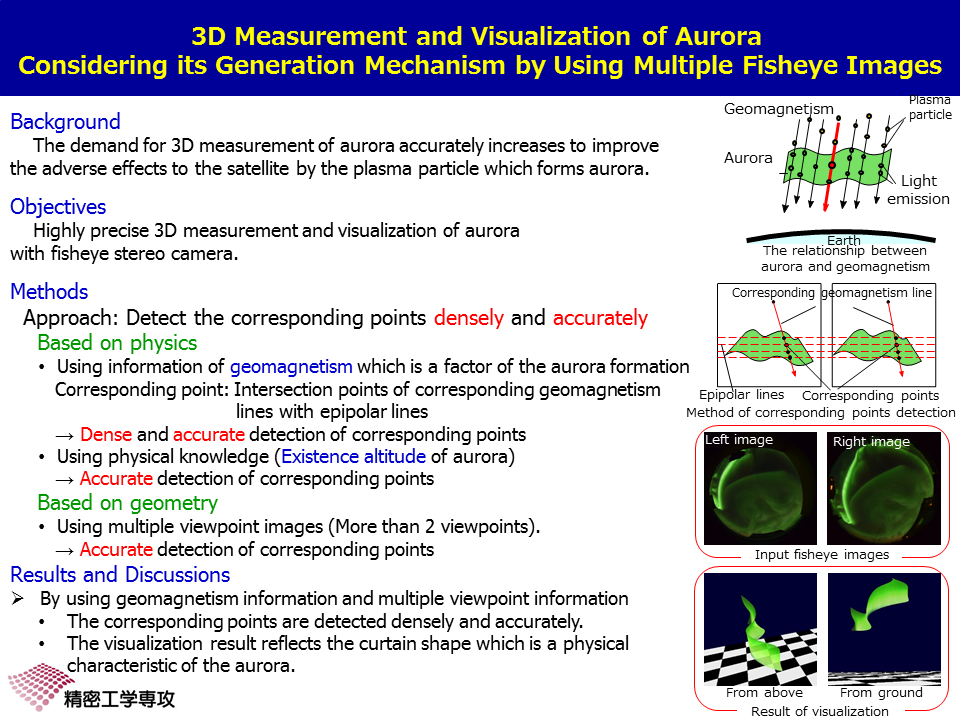
3D Measurement and Visualization of Aurora Considering its Generation Mechanism by Using Multiple Fisheye Images
 |
山下研究室
竹内 彰
Akira Takeuchi |
 |
 |
| 日本語版 |
English Version |
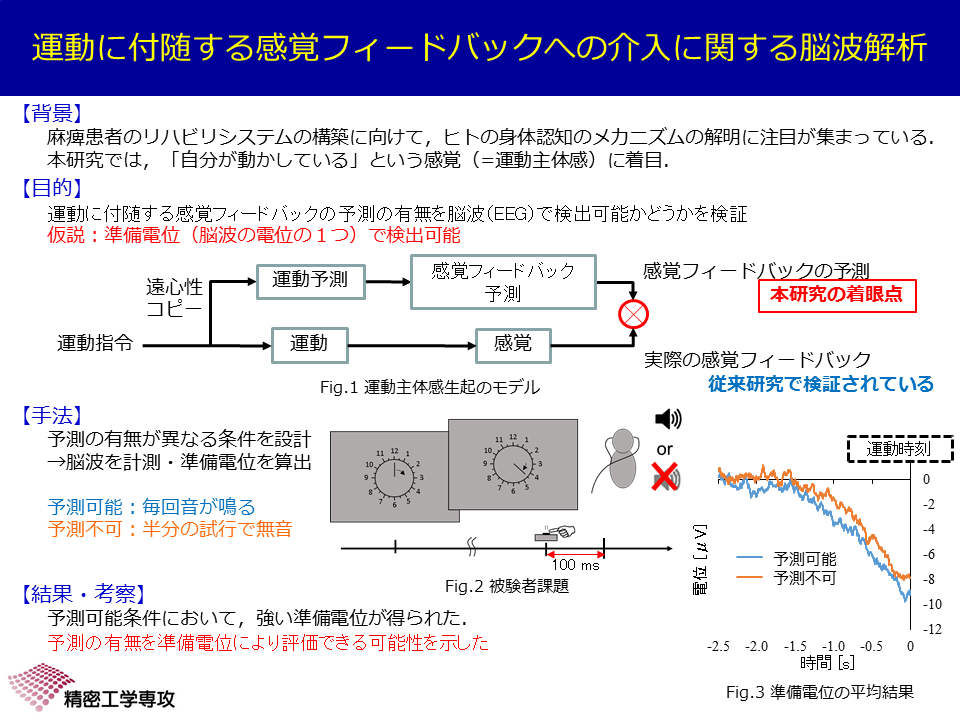
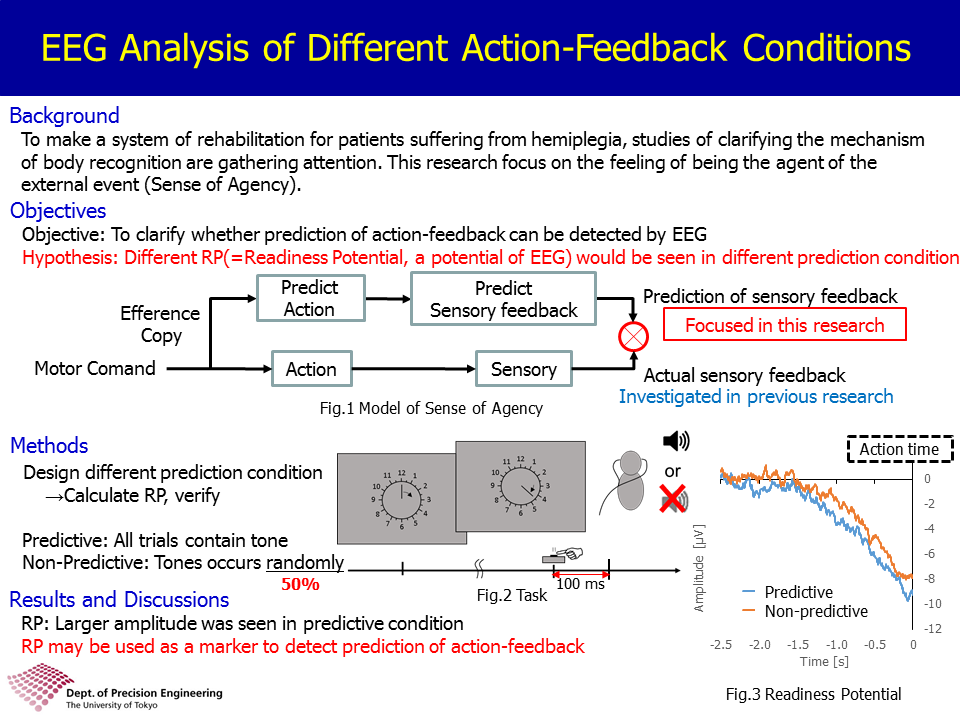
運動に付随する感覚フィードバックへの介入に関する脳波解析
EEG Analysis of Different Action-Feedback Conditions
 |
淺間研究室
簑原 凜
Rin Minohara |
 |
 |
| 日本語版 |
English Version |
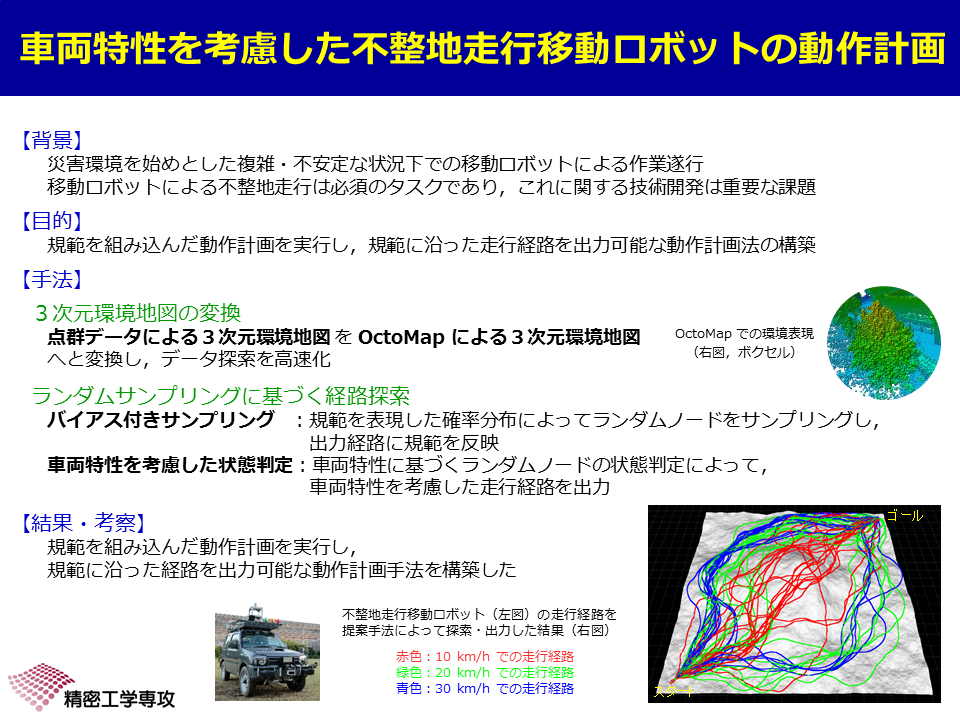
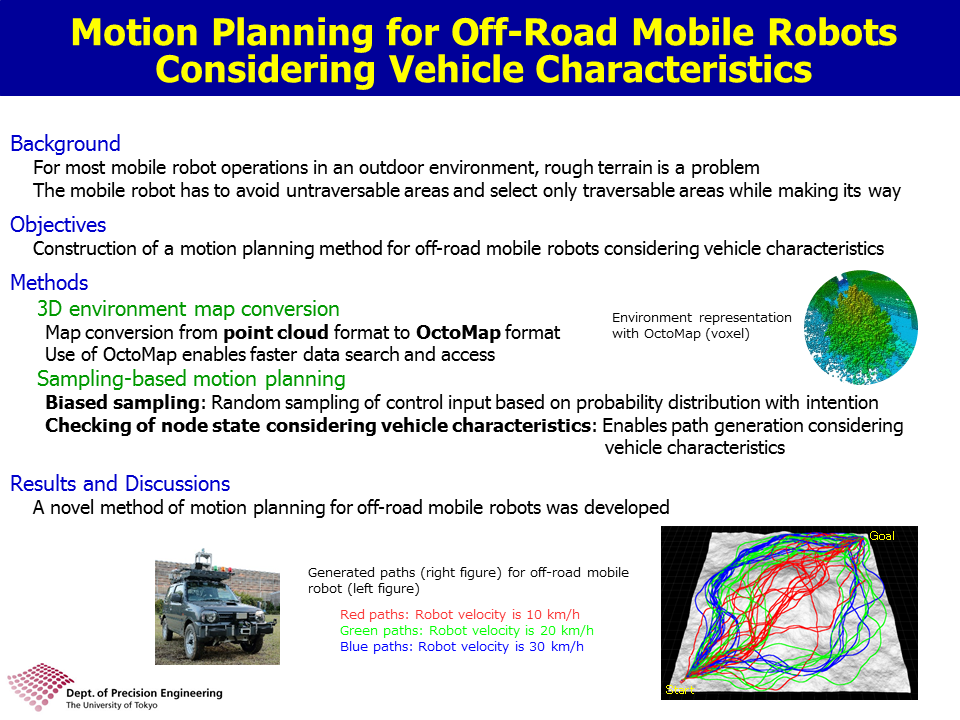
Motion Planning for Off-Road Mobile Robots Considering Vehicle Characteristics
 |
山下研究室
田中 佑典
Yusuke Tanaka |
 |
 |
| 日本語版 |
English Version |
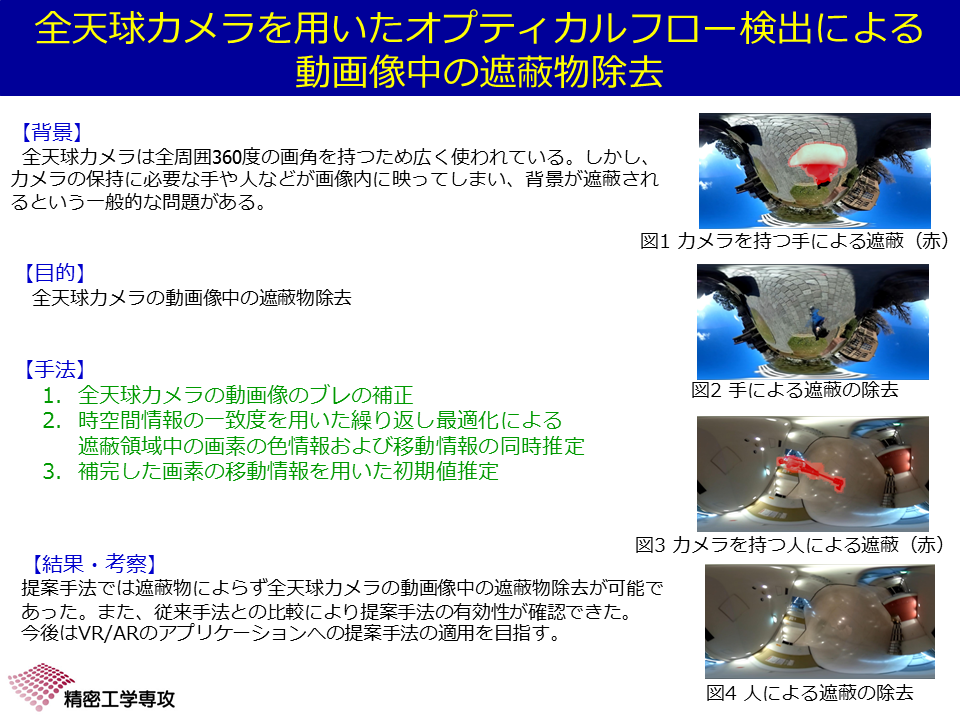
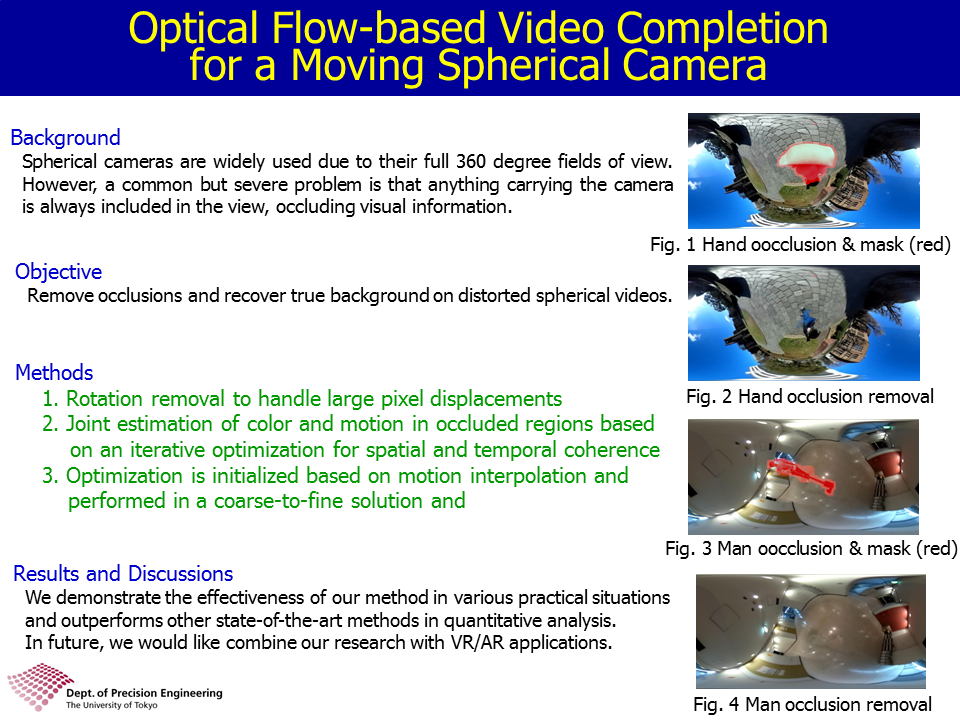
Optical Flow-based Video Completion for a Moving Spherical Camera
 |
山下研究室
徐 彬斌
Binbin Xu |
 |
 |
| 日本語版 |
English Version |
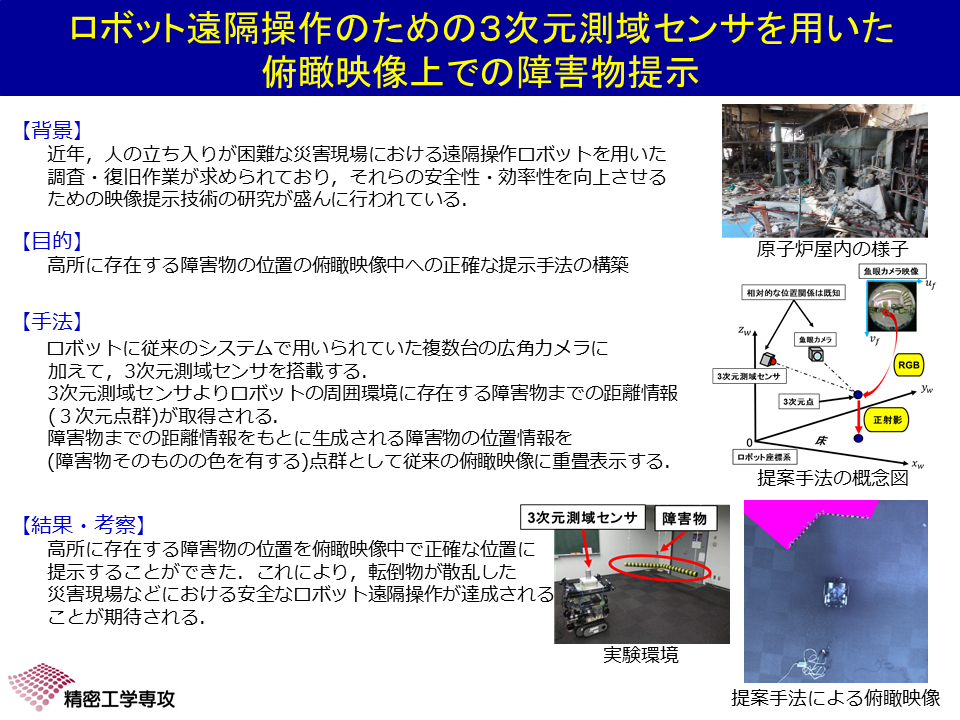
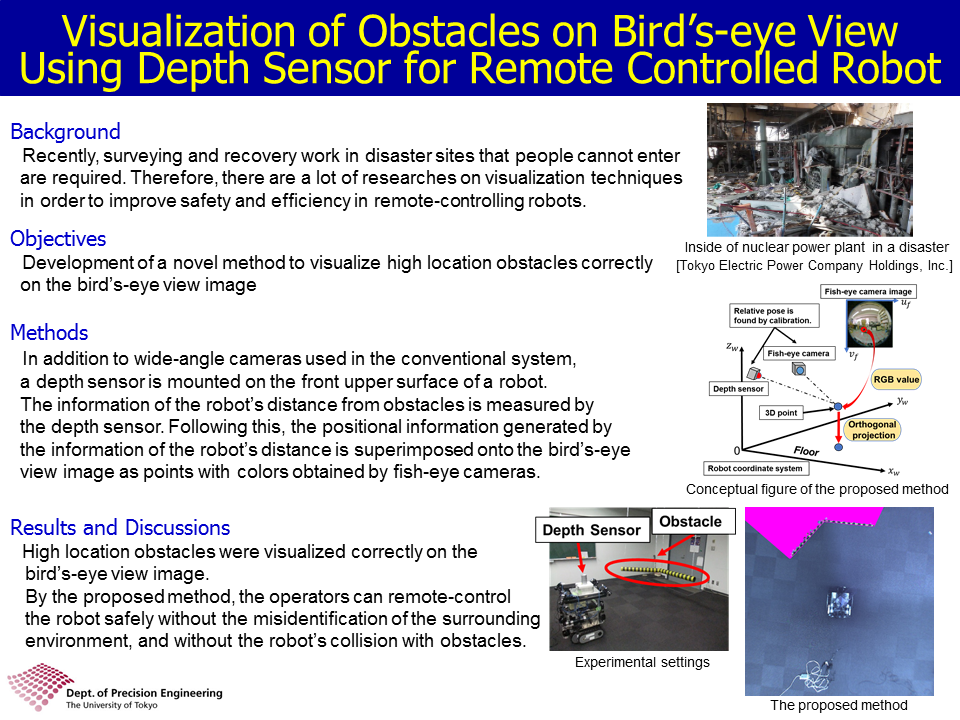
Visualization of Obstacles on Bird’s-eye View Using Depth Sensor for Remote Controlled Robot
 |
淺間研究室
粟島 靖之
Yasuyuki Awashima |
 |
 |
| 日本語版 |
English Version |
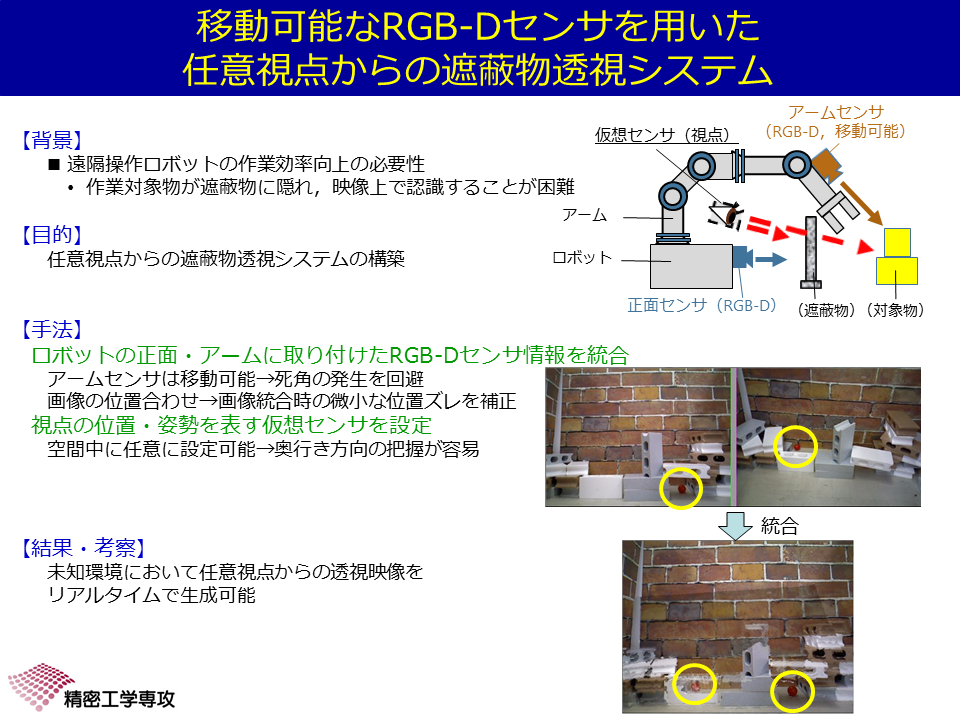
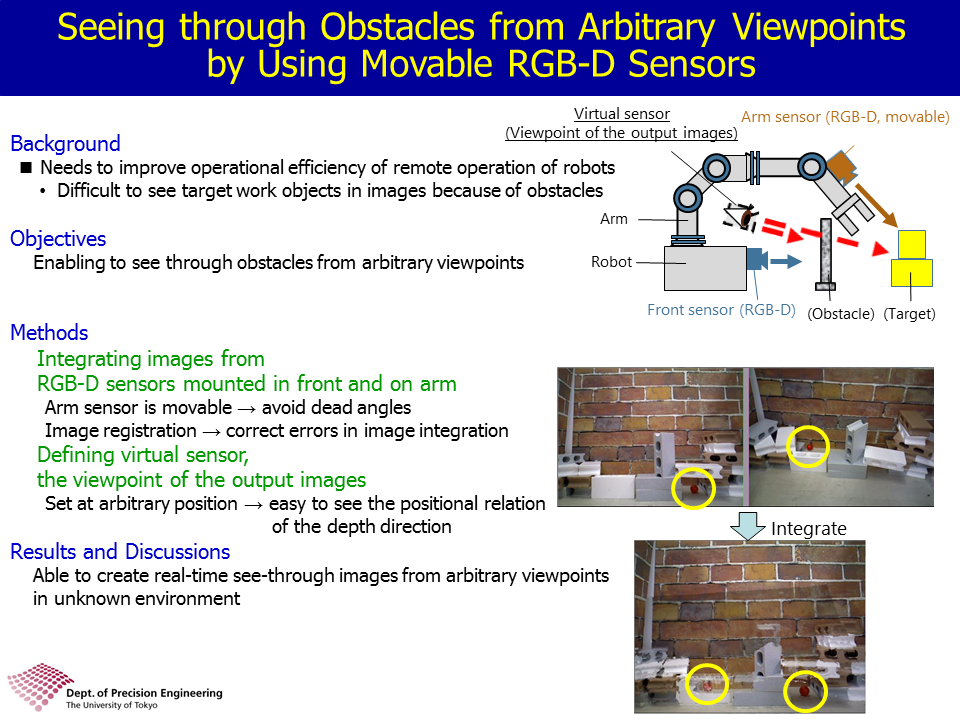
移動可能なRGB-Dセンサを用いた任意視点からの遮蔽物透視システム
Seeing through Obstacles from Arbitrary Viewpoints by Using Movable RGB-D Sensors
 |
山下研究室
橘髙 達也
Tatsuya Kittaka |
 |
 |
| 日本語版 |
English Version |
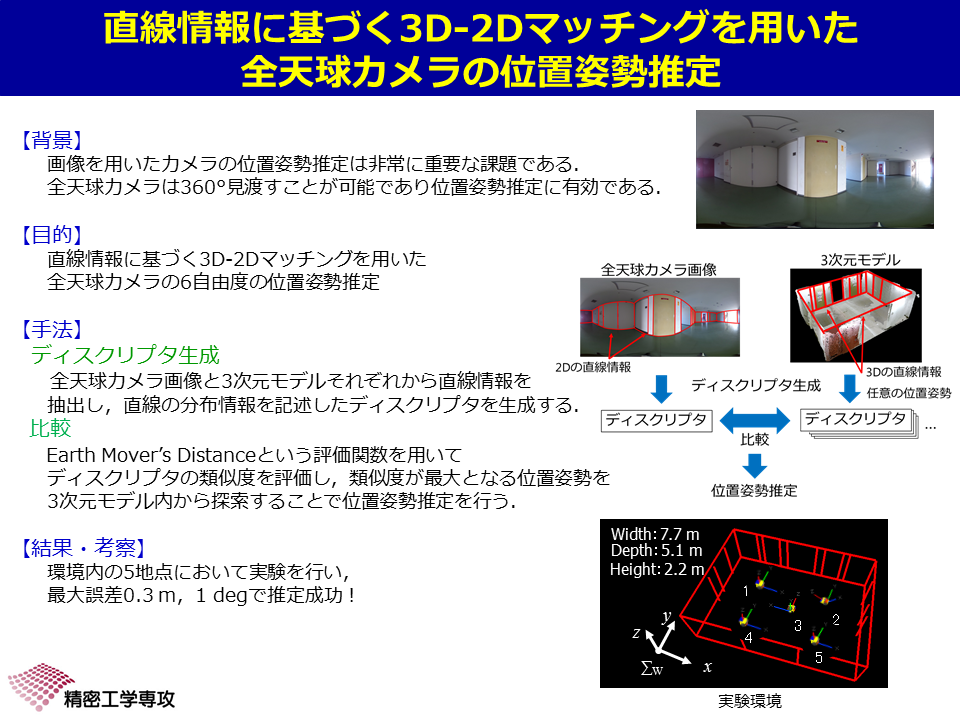
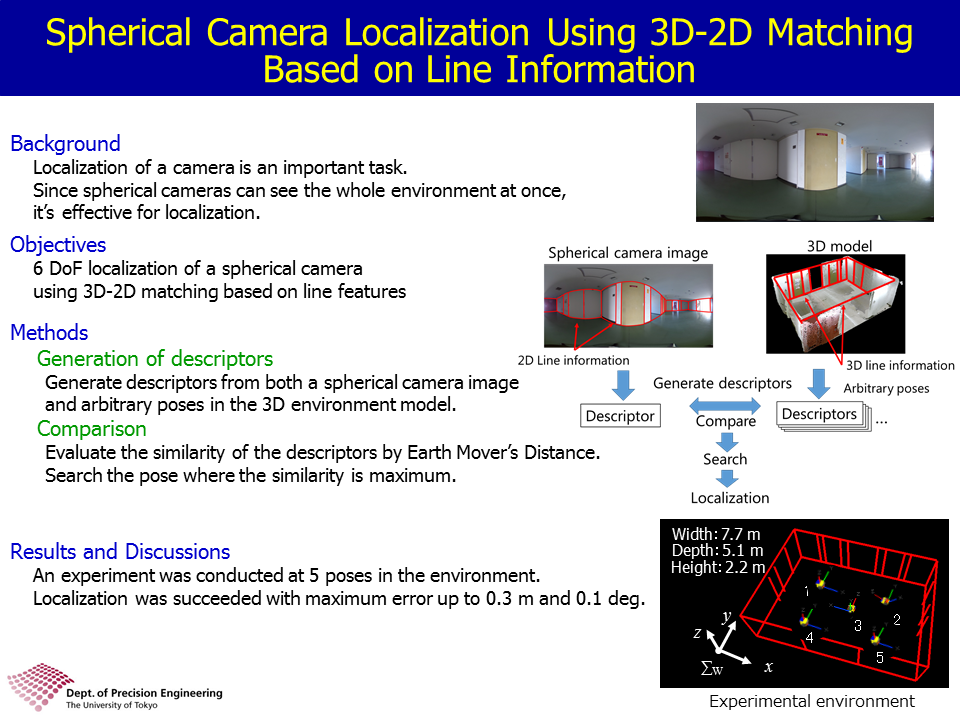
Spherical Camera Localization Using 3D-2D Matching Based on Line Information
 |
山下研究室
後藤 翼
Tsubasa Goto |
 |
 |
| 日本語版 |
English Version |
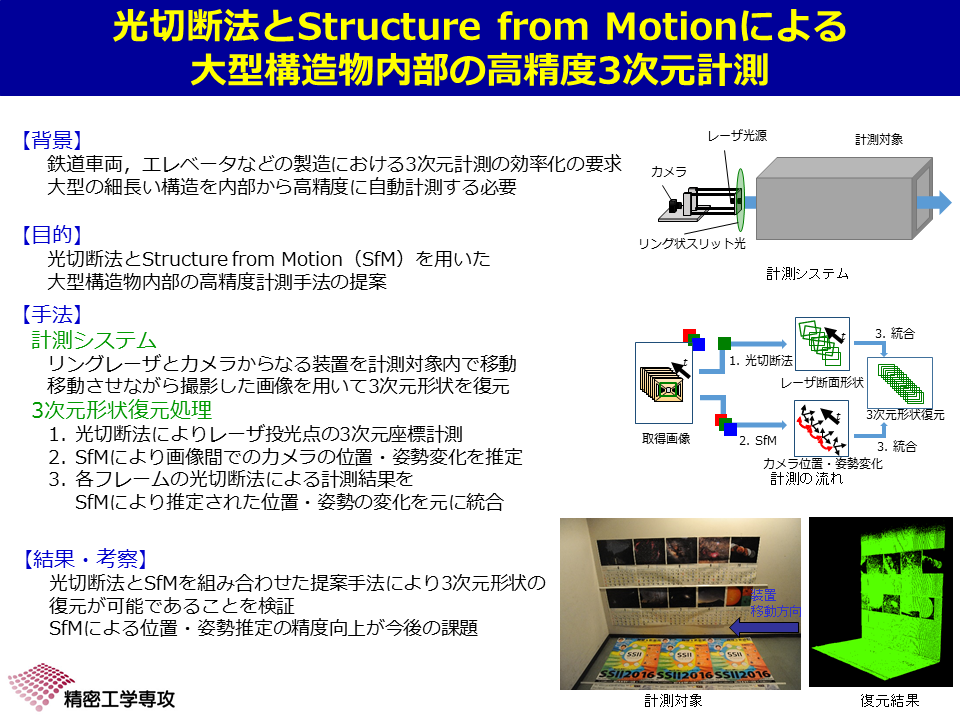
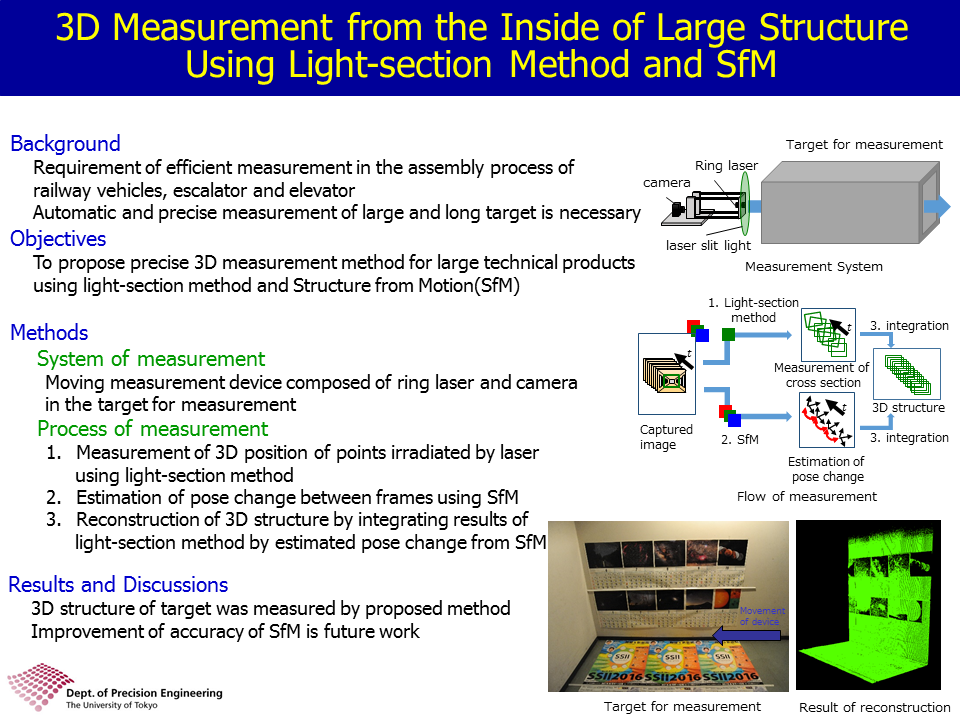
3D Measurement from the Inside of Large Structure Using Light-section Method and SfM
 |
淺間研究室
樋口 寛
Hiroshi Higuchi |
 |
 |
| 日本語版 |
English Version |
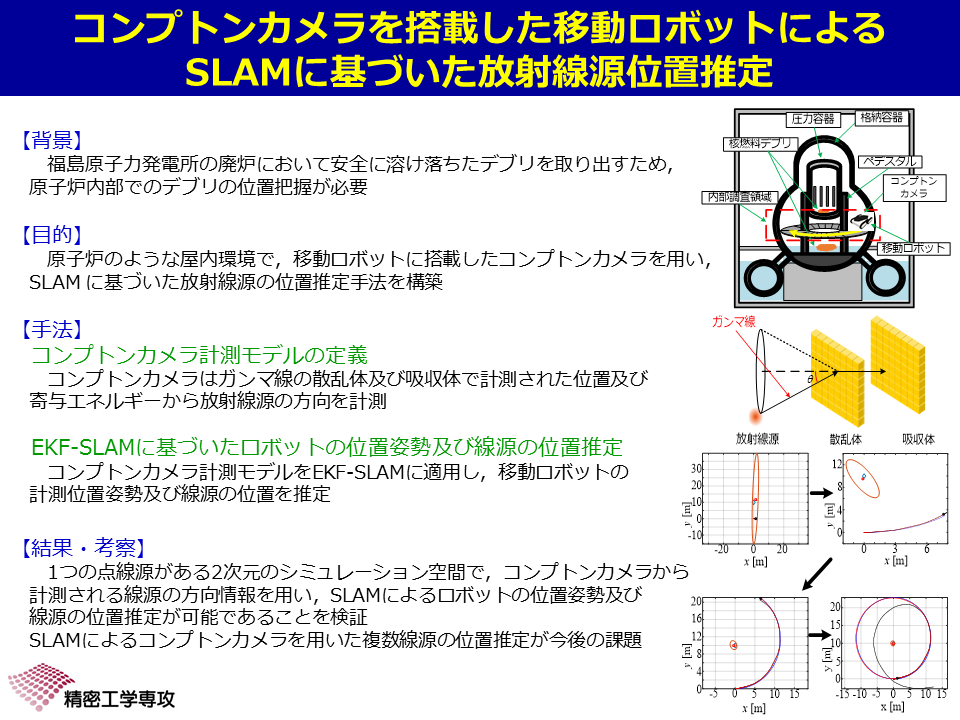
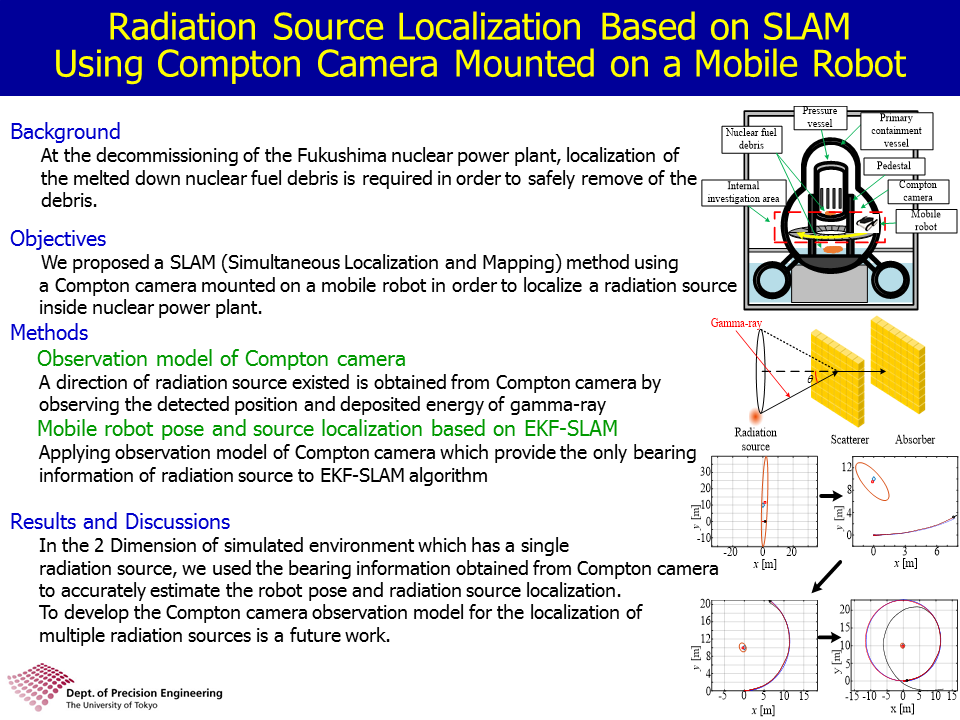
Radiation Source Localization Based on SLAM Using Compton Camera Mounted on a Mobile Robot
 |
山下研究室
金 度演
Doyeon Kim |
 |
 |
| 日本語版 |
English Version |
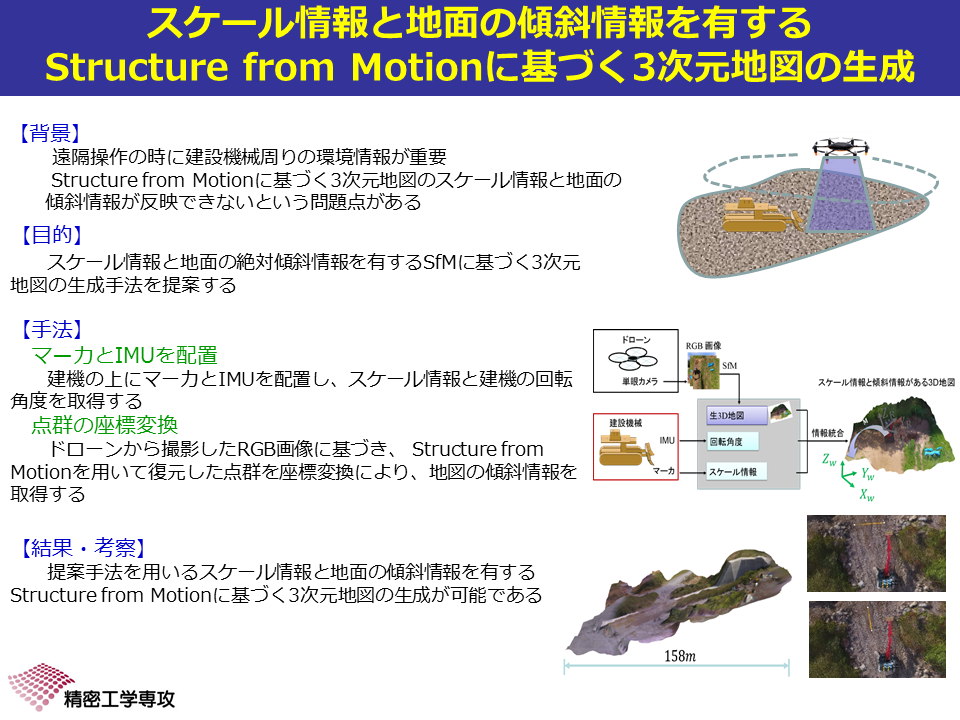
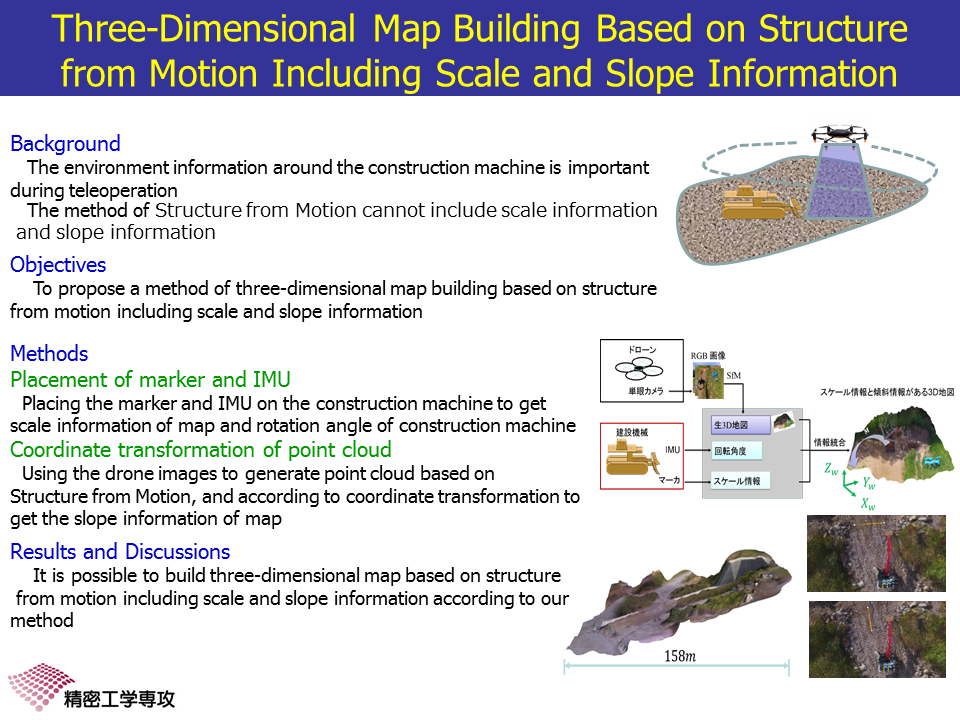
Three-Dimensional Map Building Based On Structure from Motion Including Scale and Slope Information
 |
山下研究室
邵 宇陽
Yuyang Shao |
 |
 |
| 日本語版 |
English Version |
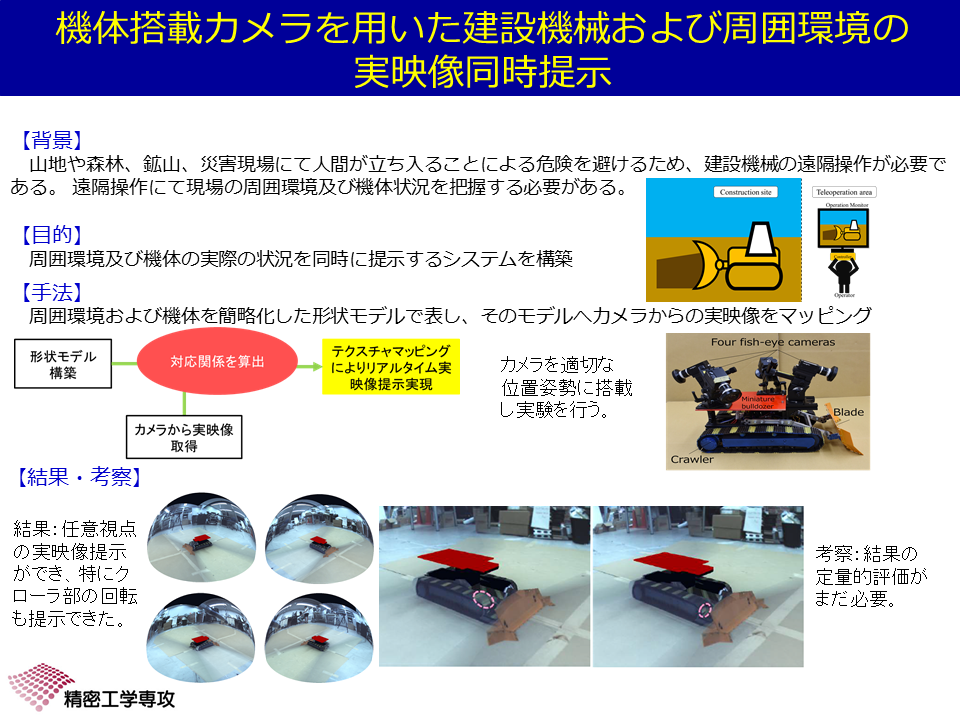
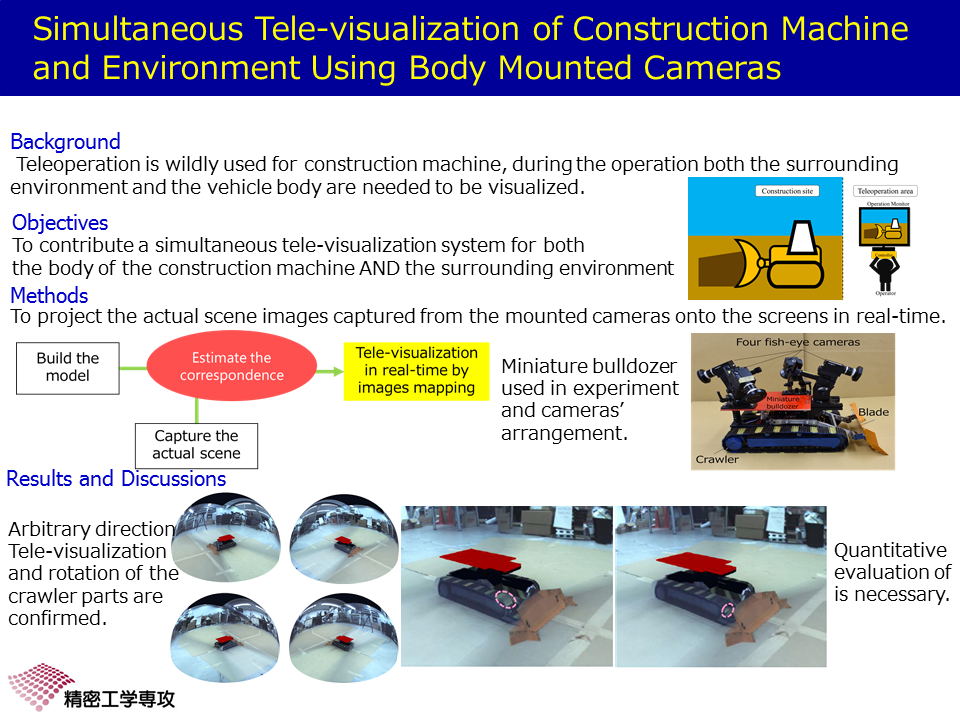
Simultaneous Tele-visualization of Construction Machine and Environment Using Body Mounted Cameras
 |
淺間研究室
孫 蔚
Wei Sun |
 |
 |
| 日本語版 |
English Version |
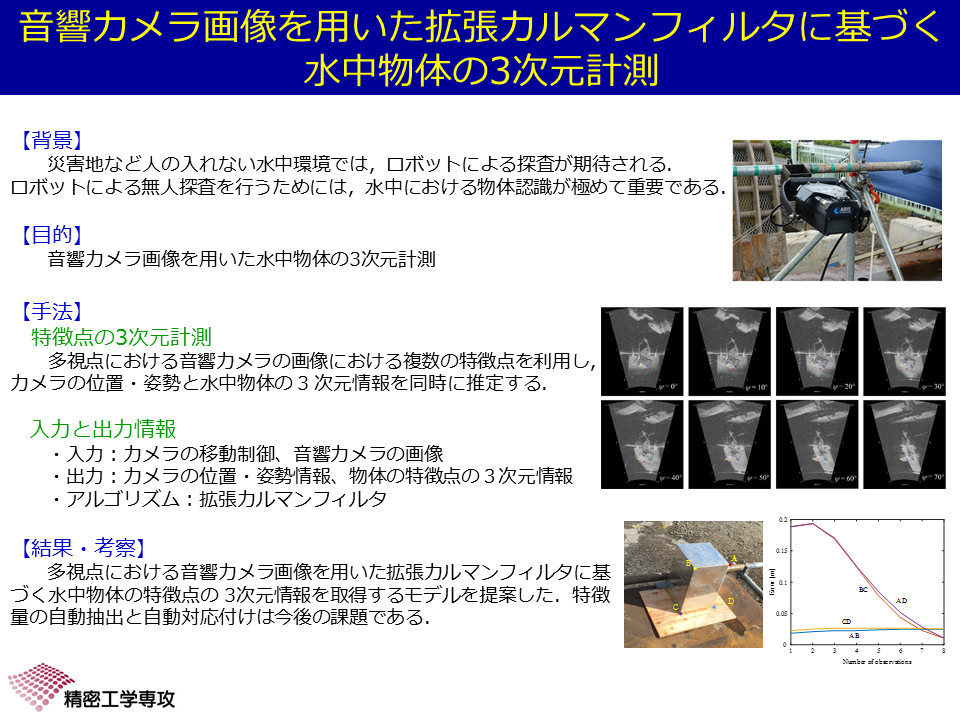
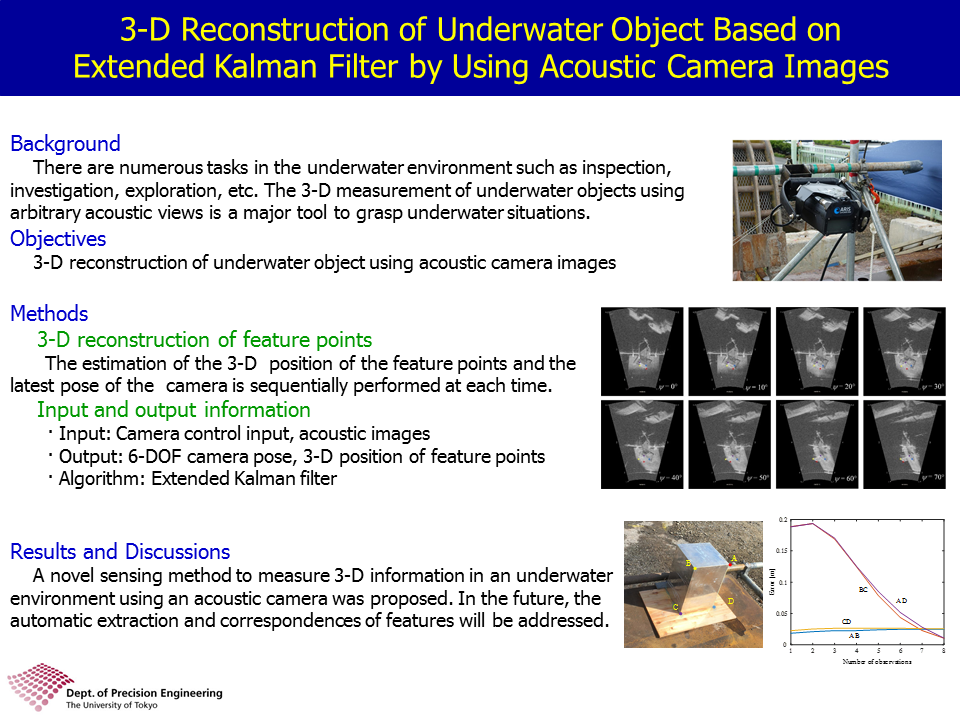
3-D Reconstruction of Underwater Object Based on Extended Kalman Filter by Using Acoustic Camera Images
 |
淺間研究室
マイ ゴク チュン
Ngoc Trung Mai |
 |
 |
| 日本語版 |
English Version |
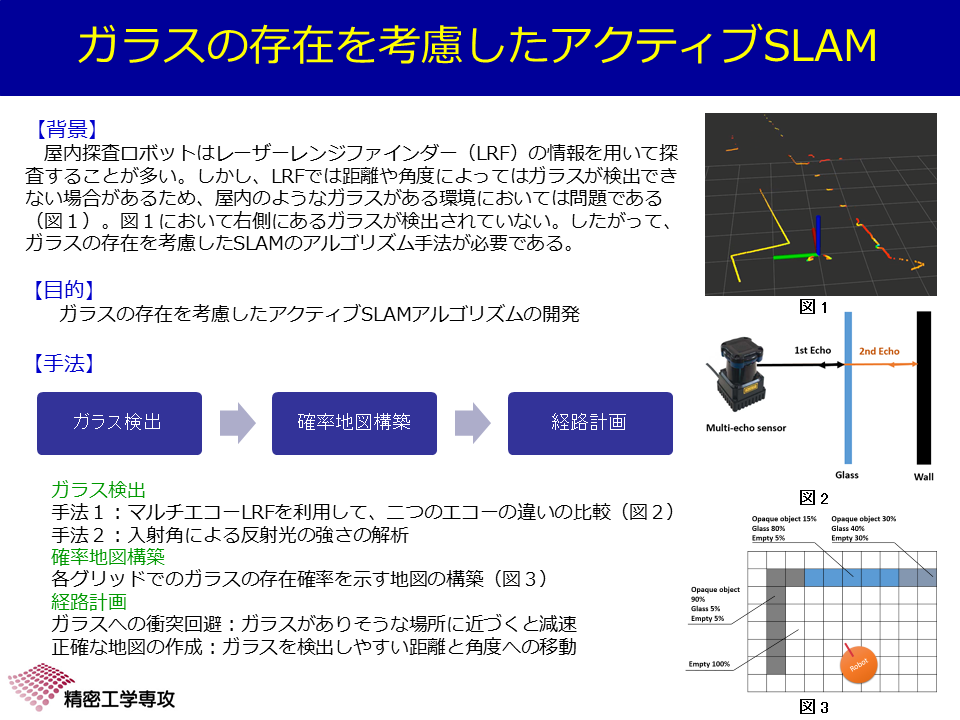
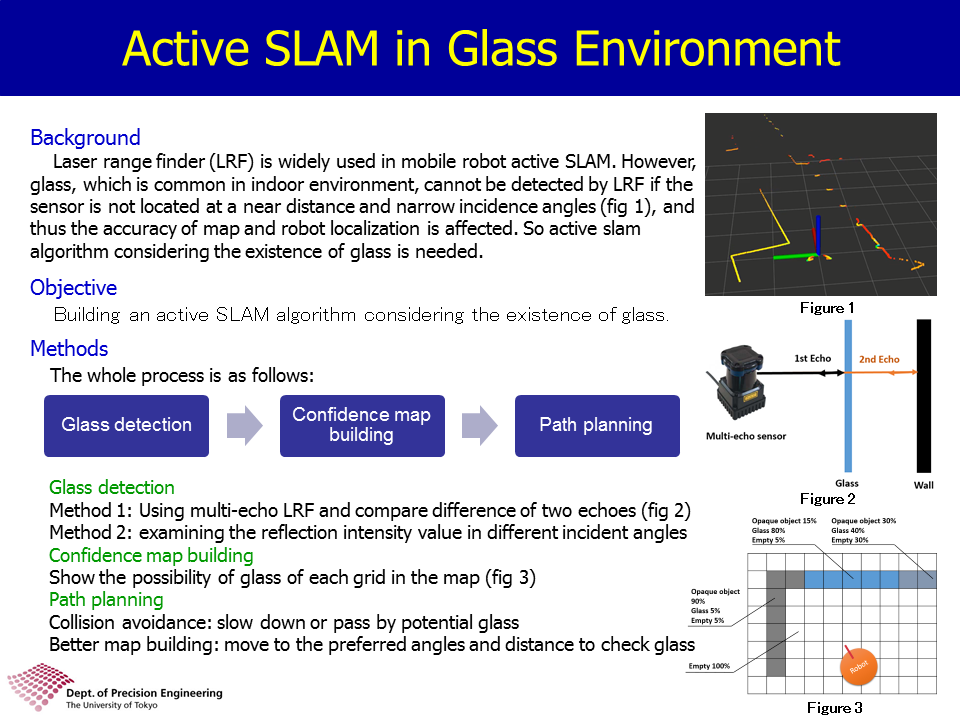
Active SLAM in Glass Environment
 |
山下研究室
江 君
Jun Jiang |
 |
 |
| 日本語版 |
English Version |
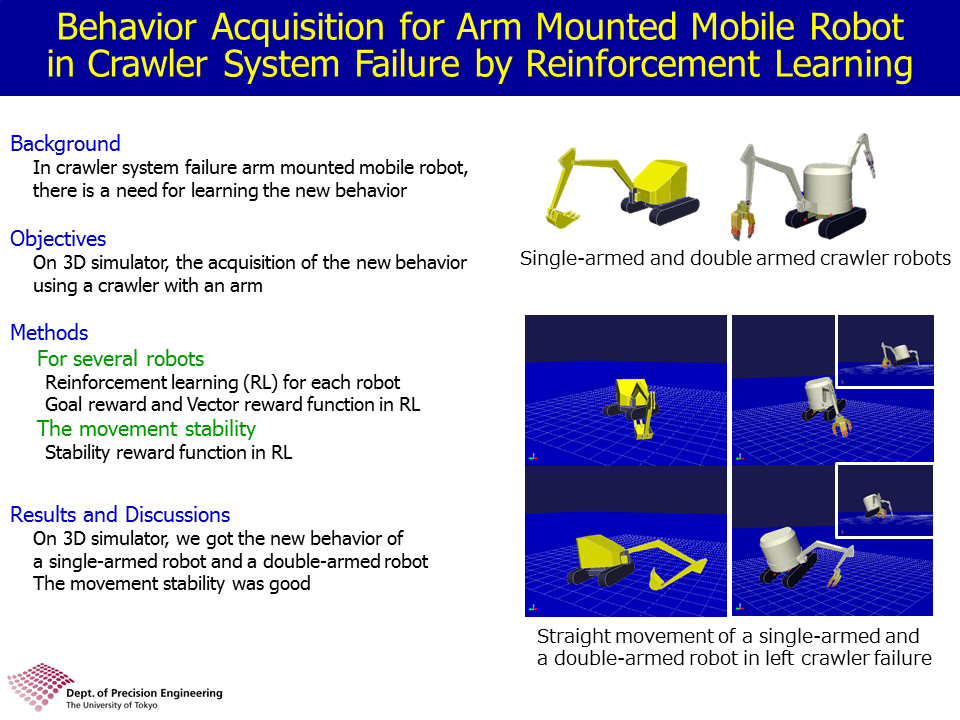
Behavior Acquisition for Arm Mounted Mobile Robot in Crawler System Failure by Reinforcement Learning
 |
山下研究室
伊藤 翼
Tasuku Ito |
 |
 |
| 日本語版 |
English Version |
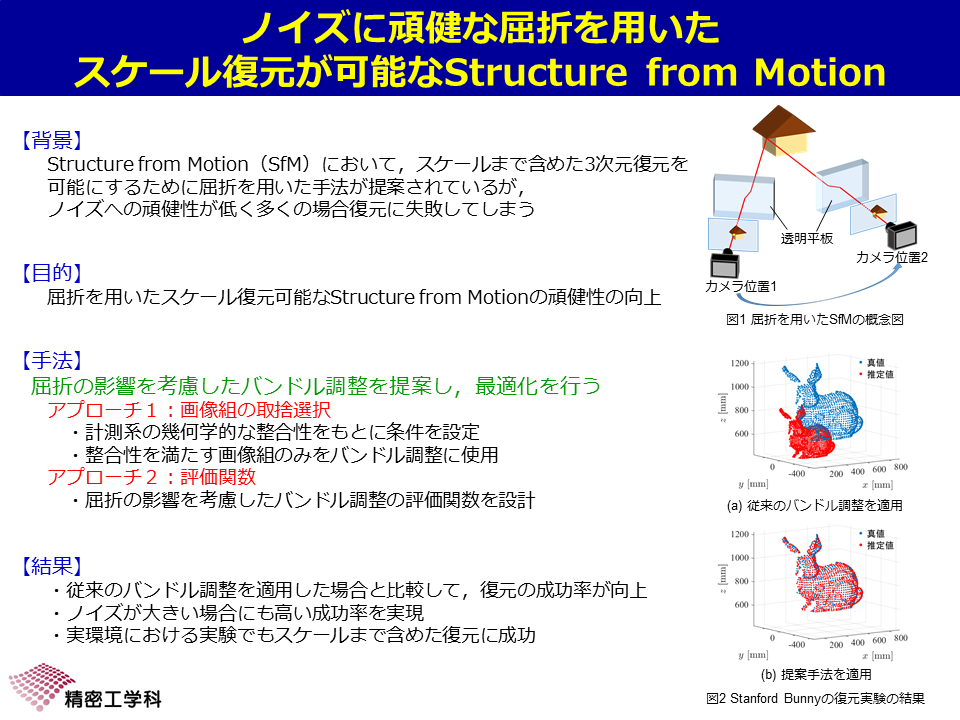
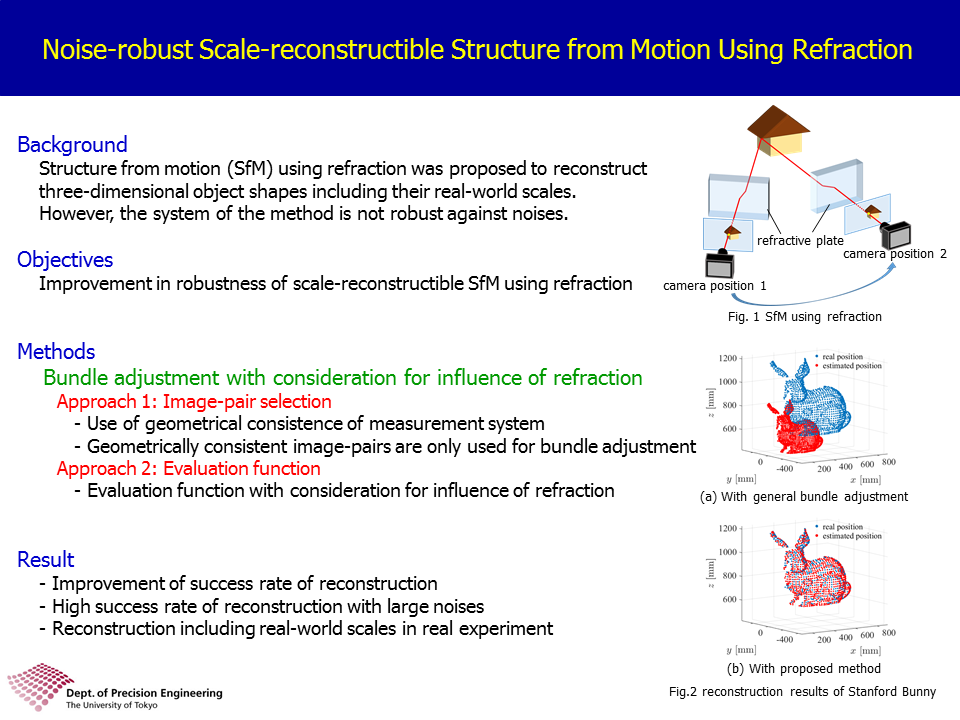
Noise-robust Scale-reconstructible Structure from Motion Using Refraction
 |
山下研究室
奥村 有加里
Yukari Okumura |
 |
 |
| 日本語版 |
English Version |
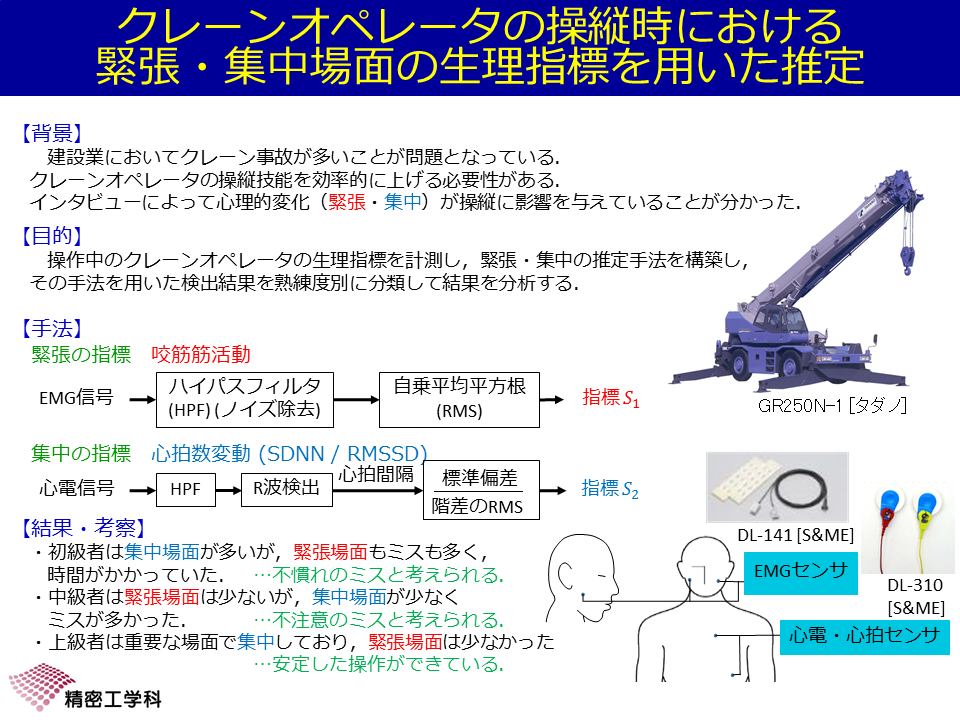
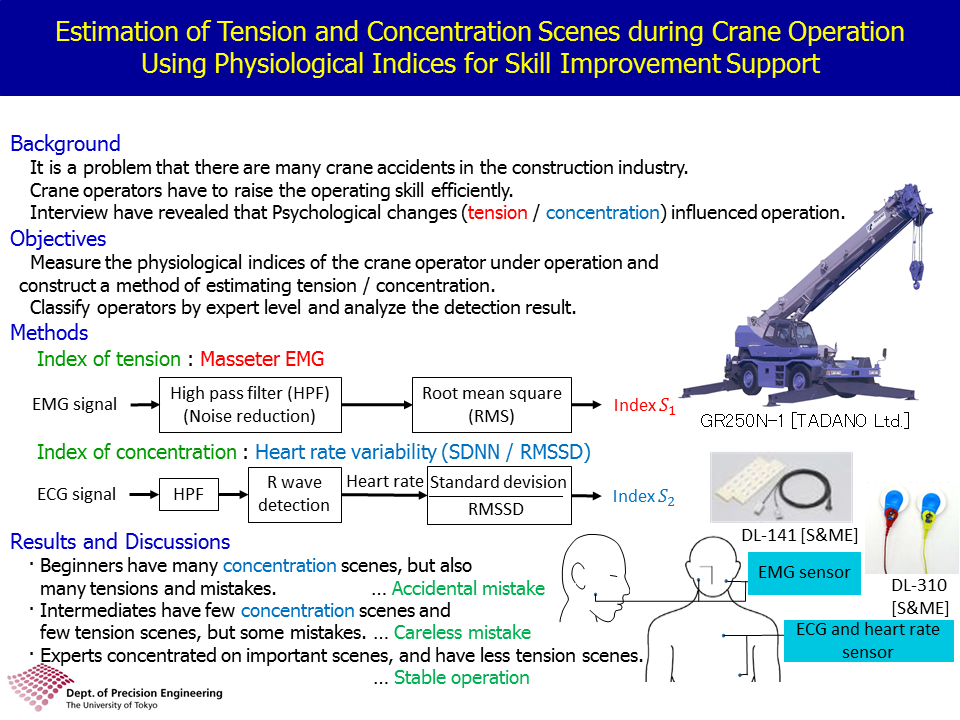
Estimation of Tension and Concentration Scenes during Crane Operation Using Physiological Indices for Skill Improvement Support
 |
淺間研究室
杉本 賢勇
Takao Sugimoto |
 |
 |
| 日本語版 |
English Version |
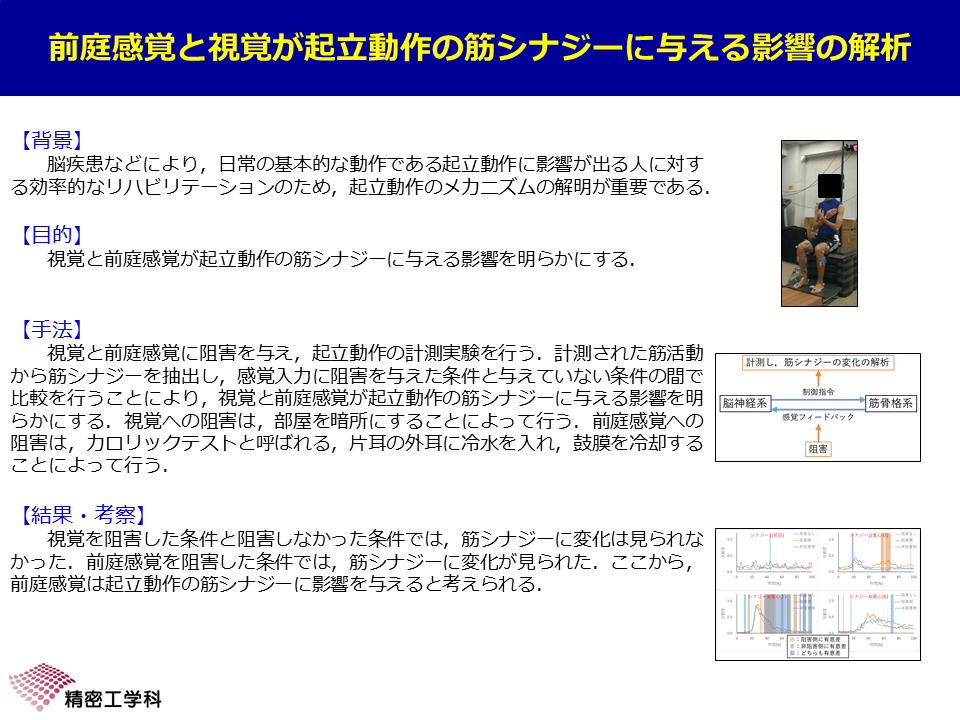
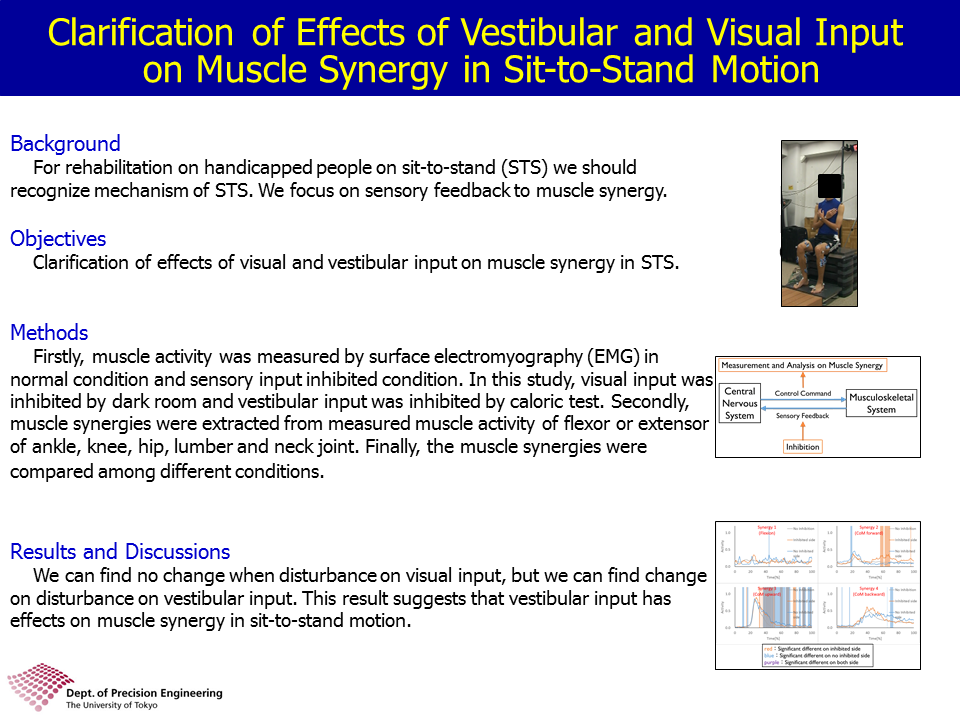
Clarification of Effects of Vestibular and Visual Input on Muscle Synergy in Sit-to-Stand Motion
 |
淺間研究室
吉田 和憲
Kazunori Yoshida |
 |
 |
| 日本語版 |
English Version |
 サービスロボティクス分野
淺間研
山下研
田村研
社会連携講座インテリジェント施工システム
人工物工学研究センター
太田研
原研
サービスロボティクス分野
淺間研
山下研
田村研
社会連携講座インテリジェント施工システム
人工物工学研究センター
太田研
原研
Copyright © 2012-2018 Service Robotics Division of the University of Tokyo All Rights Reserved.