ロボットのための環境と作業構造のユニバーサルデザイン
新井教授,上田助教
家庭においてロボットが家事に従事することに潜在的な需要があることは間違いない.しかし,家庭環境内で実際にロボットを動かすためには数多くの技術的課題があり,現在は移動ロボット型の掃除機などが一部で普及しているのみである.その原因はハードウェア,ソフトウェア両面において数多く存在するが,主要な問題として,様々なタイプのロボットが様々なタスクをこなすような状況を想定すると,作業とロボットの組み合わせでいちいちプログラムの開発が必要になり,その設計指針がばらばらで統一できないことが挙げられる.
本研究では,そのような問題に対し,環境の側のハード的,ソフト的な仕様を定めるというアプローチで解決することを目指している.すなわち,環境の側にセンサを配置してロボットに精度を保証した計測情報提供を行ったり,その環境で作業を行う場合における行動計画のために必要な情報を提供したりすることで,新たなロボットの導入やタスクの実行を容易に行える仕組みを提案することが本研究の目的である.
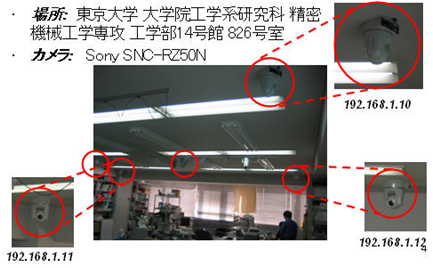
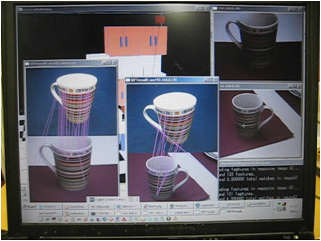
当研究室では,複数のセンサ情報を統合し,室内環境中に存在する様々な物体の位置・姿勢,およびロボット位置情報を提供するルームマネージメントシステムの開発を行っている.また,ロボットに作業をさせるためのプログラム構造の検討を(独)産業総合研究所,(株)東芝と共に行っている.また,開発したソフトウェアをRTミドルウェア1)でモジュール化し,汎用化を試みている.

Keywords: home robotics, universal design, RT-Middleware, room management system
References
1) P. Kamol, S. Nikolaidis, R. Ueda, and T. Arai. “RFID Based Object Localization System using Ceiling Cameras with Particle Filter,” In Proceedings of Future Generation Communication and Networking,Vol.2 , pp., 2007.
2) 文部科学省ウェブサイト http://www.mext.go.jp/b_menu/houdou/18/05/06051814/001/001.htm