| 2025 | 2024 | 2023 | 2022 | 2021 | |||||
| 2020 | 2019 | 2018 | 2017 | 2016 | 2015 | 2014 | 2013 | 2012 | 2011 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 博士 | 樋口 寛 Hiroshi Higuchi |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2018年4月 ~ 2025年9月 |
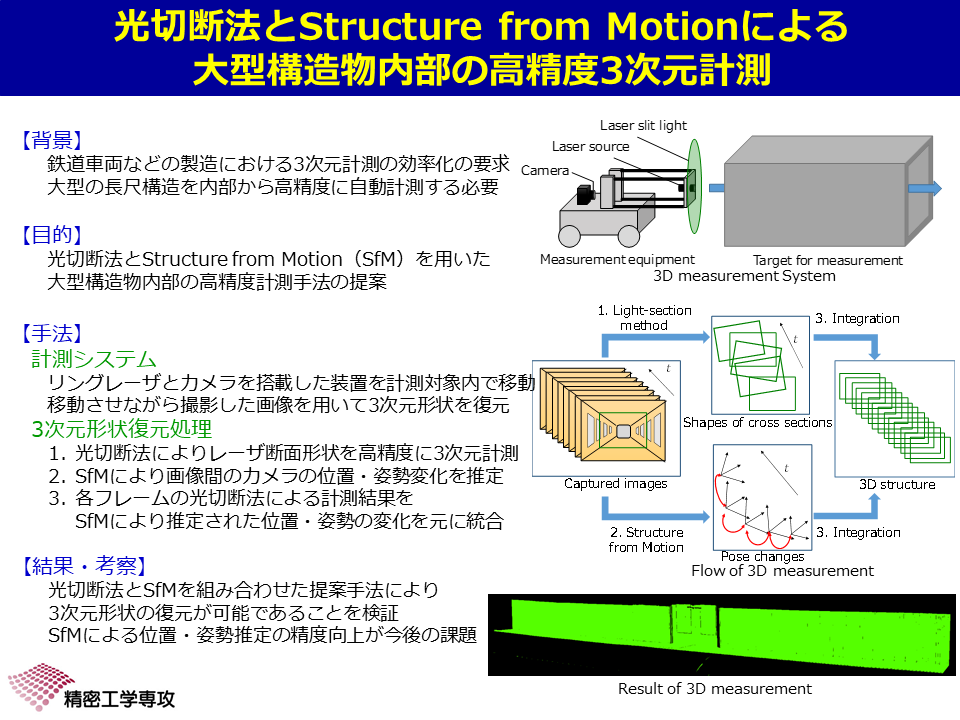
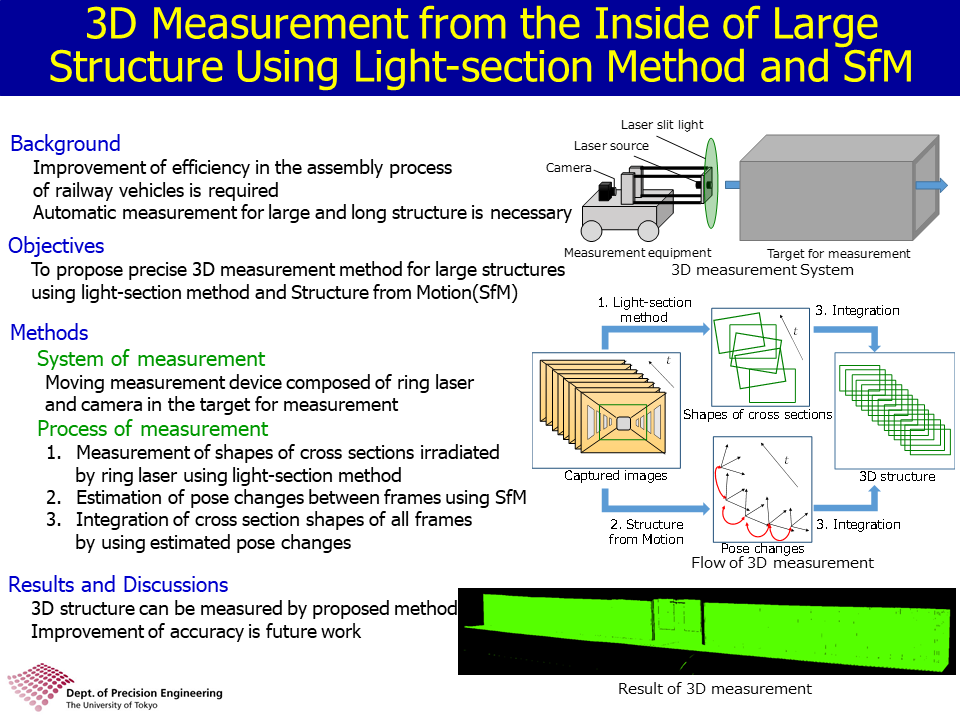
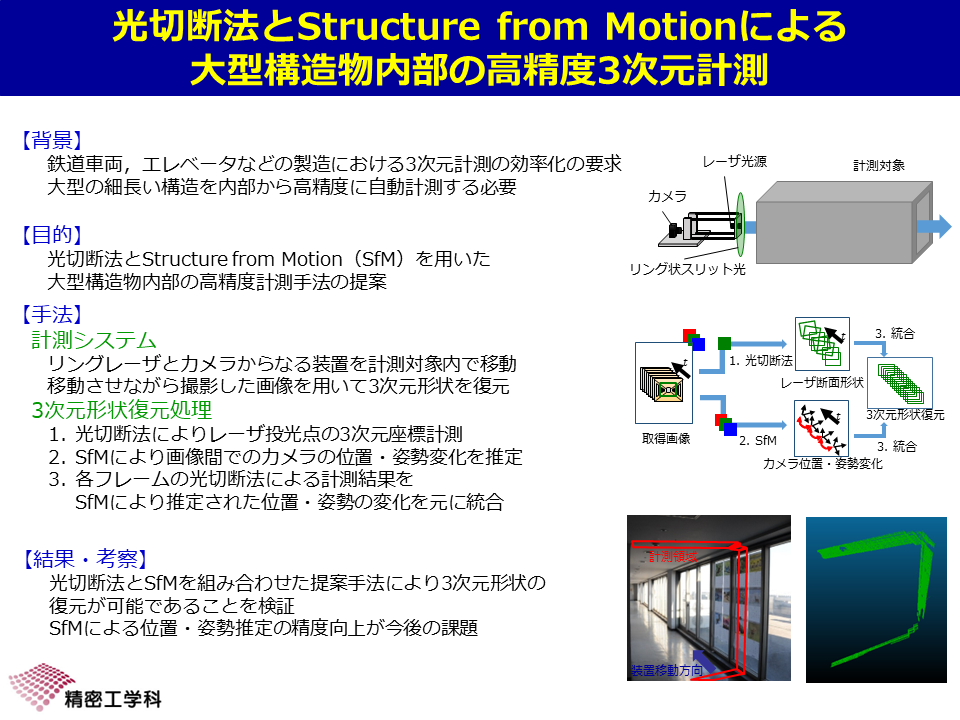
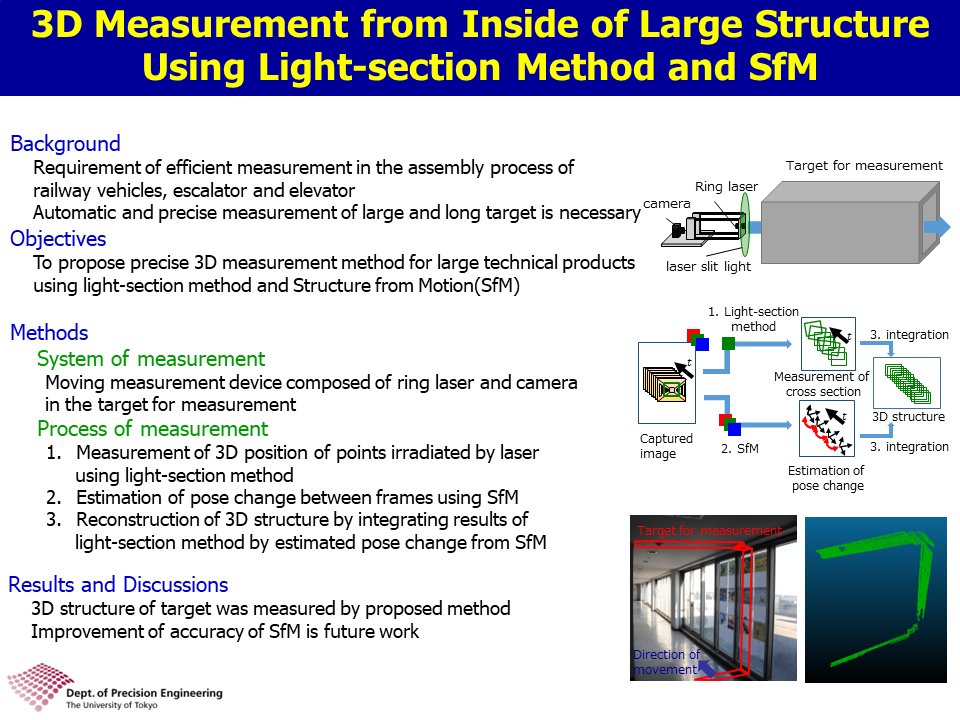
光切断法による長尺物の3次元計測 3D Measurement Using Light-section Method |
就職 |
| 博士 | 李 晙源 Junwoon Lee |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2025年4月 ~ 2025年9月 |
極限・劣化環境のためのマルチモーダル情報を用いた切替型SLAM Switching-based Multi-modal SLAM for Extreme and Degraded Environments |
博士進学 University of Michigan |
| 交 換 留 学 生 |
Young-woon Song |  |
Pohang University of Science and Technology Korea |
山下 淳 | 2025年9月 ~ 2025年10月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Raynaldio Limarga |  |
The University of Manchester UK |
松日楽 信人 | 2025年9月 ~ 2025年10月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Mehdi Hellou |  |
The University of Manchester UK |
松日楽 信人 | 2025年9月 ~ 2025年12月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Joshua Raymond Bettles |  |
The University of Manchester UK |
山下 淳 | 2025年9月 ~ 2025年12月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Aisulu Tileukulova |  |
Nazarbayev University Kazakhstan |
山下 淳 | 2025年9月 ~ 2025年12月 |
- | - |
| 交 換 留 学 生 |
Haochuan Zhang |  |
Oregon State University USA |
山下 淳 | 2025年10月 ~ 2025年12月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Nancy Bellingan |  |
Createc UK |
松日楽 信人 | 2025年11月 ~ 2025年12月 |
NEST Fellow | - |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 特任 研究 員 |
井倉 幹大 Mikihiro Ikura |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2023年10月 ~ 2024年5月 |
高速カメラとイベントカメラを用いた高速かつ悪環境に対して頑健なセンシングシステム Robust Visual Sensing Systems against Fast and Adverse Environments Using High-speed and Event-based Cameras |
ポスドク IIT |
| 博士 13 |
呉 家旭 Jiaxu Wu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2025年3月 |
深層強化学習を用いた人間共存環境におけるロバストなロボットナビゲーション Robust Robot Navigation in Human Populated Environment Using Deep Reinforcement Learning |
特任助教 |
| 博士 14 |
伊賀上 卓也 Takuya Igaue |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2025年3月 |
複数カメラの協調的位置姿勢推定に基づくテクスチャの乏しい大型構造物の3次元計測 Three-dimensional Measurement of Texture-limited Large-scale Structures via Cooperative Pose Estimation of Multiple Cameras |
特任助教 |
| 修士 45 |
寺尾 颯登 Hayato Terao |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
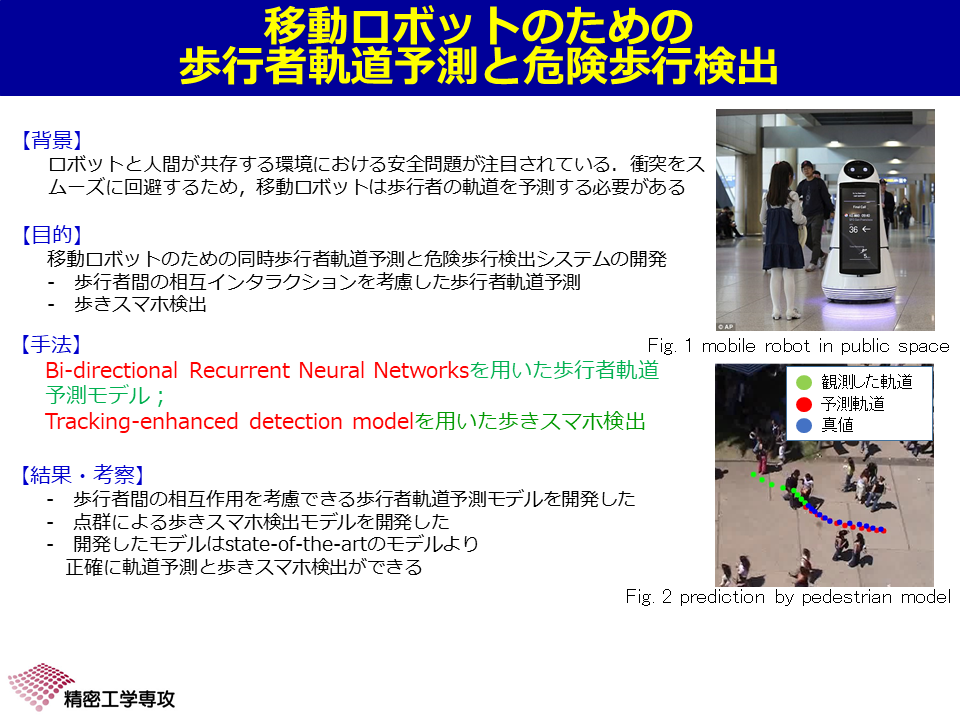
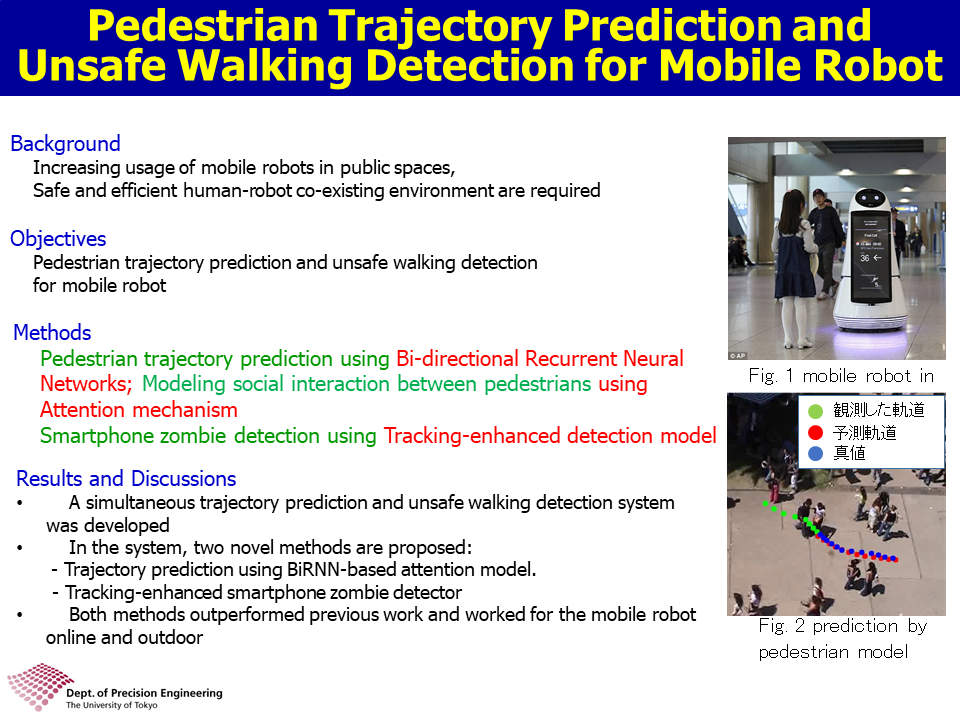
山下 淳 | 2022年10月 ~ 2024年9月 |
移動ロボットの安全なナビゲーションのための変分オートエンコーダを用いたオクルージョンに頑健な歩きスマホの識別 Detection of Texting While Walking in Occluded Engironment Using Variational Autoencoder for Safe Mobile Robot Navigation |
就職 |
| 修士 46 |
劉 子萱 Zixuan Liu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年10月 ~ 2024年9月 |
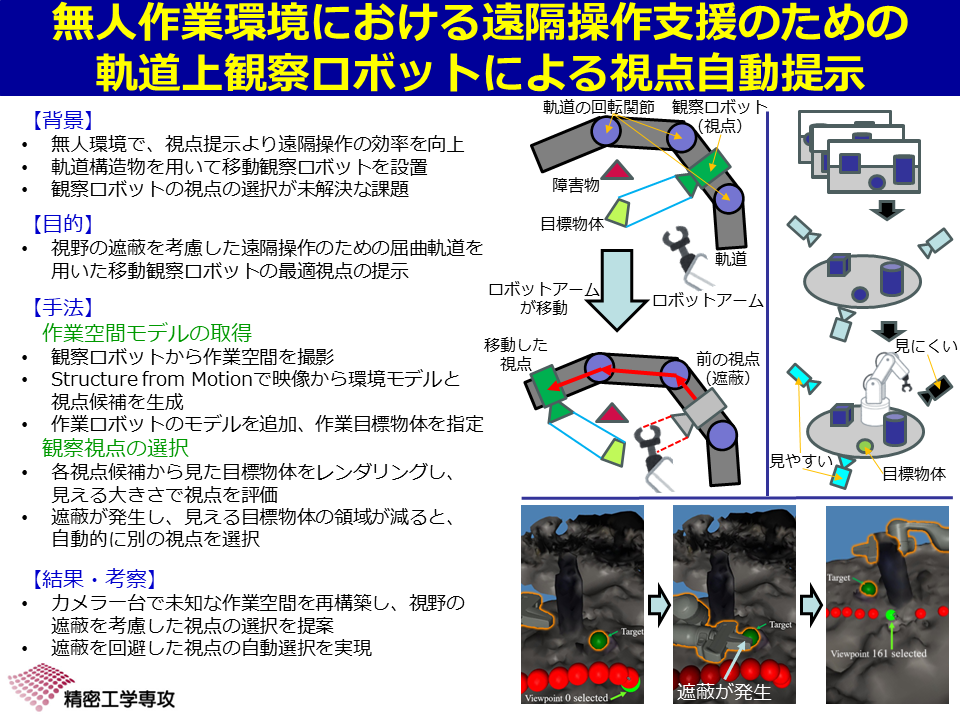
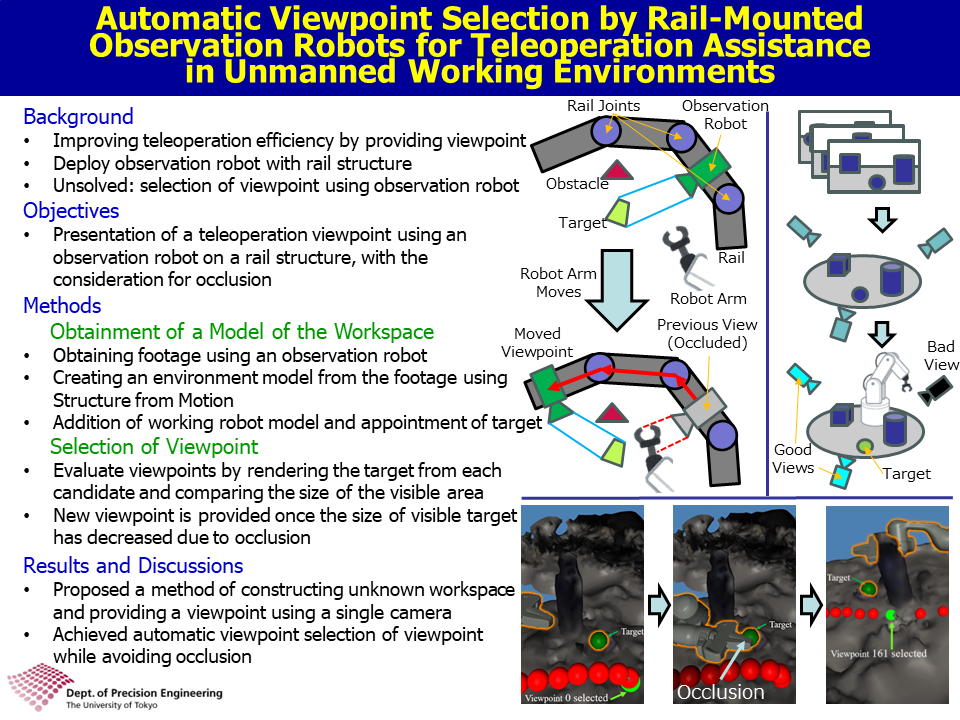
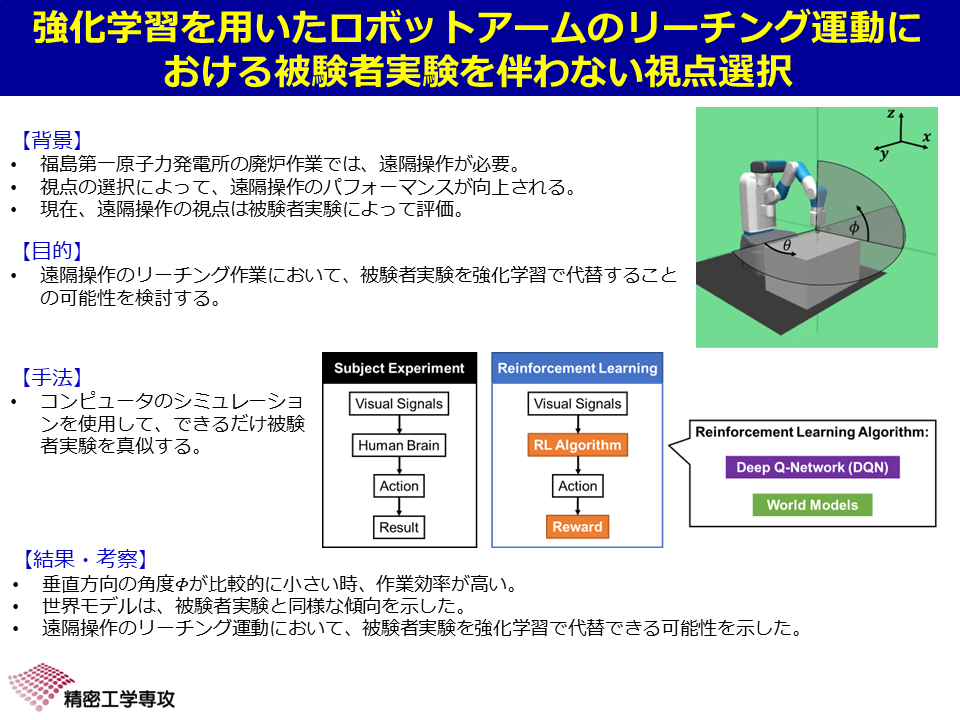
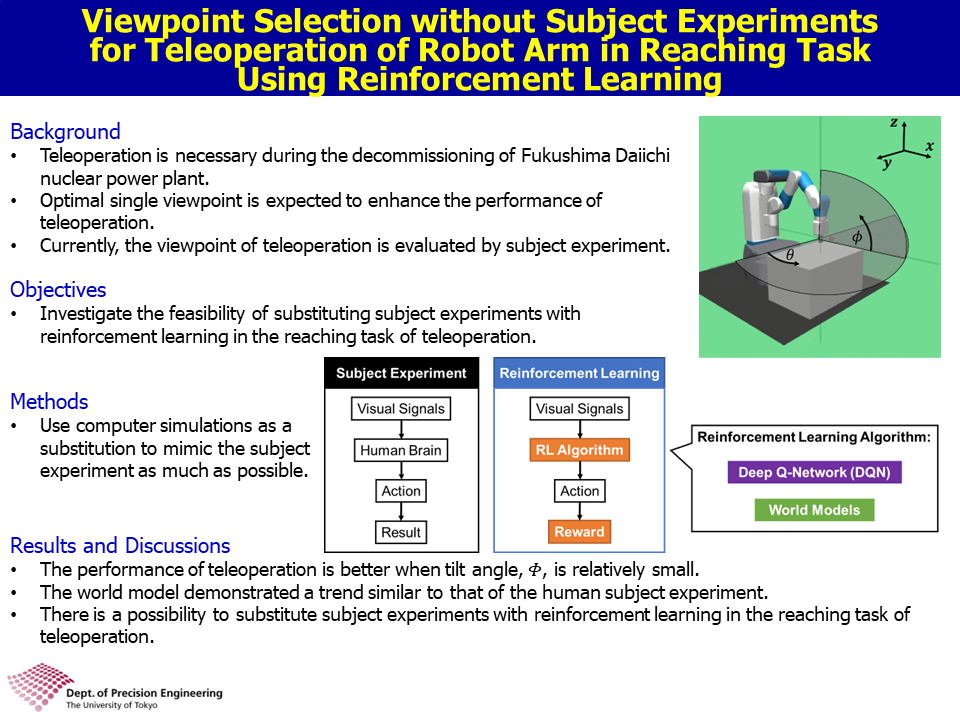
無人作業環境における遠隔操作支援のための軌道上観察ロボットによ視点自動提示 Automatic Viewpoint Selection by Rail-mounted Observation Robots for Teleoperation Assistance in Unmanned Working Environments |
就職 |
| 修士 47 |
朝倉 友和 Tomokazu Asakura |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
2対の全天球カメラとクロスラインレーザによる相対位置姿勢推定に基づく光切断法を用いた3次元計測 Cross Line Structured via Mutual Pose Estimation of Two Sets of Spherical Camera and Cross Line Laser |
就職 |
| 修士 48 |
荻原 佑介 Yusuke Ogihara |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
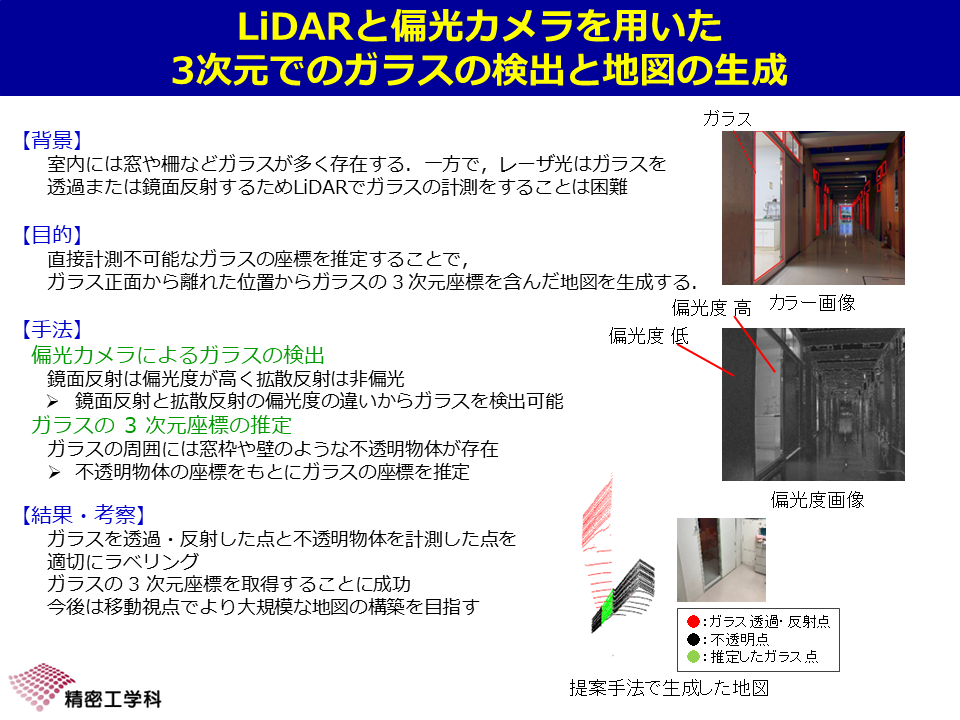
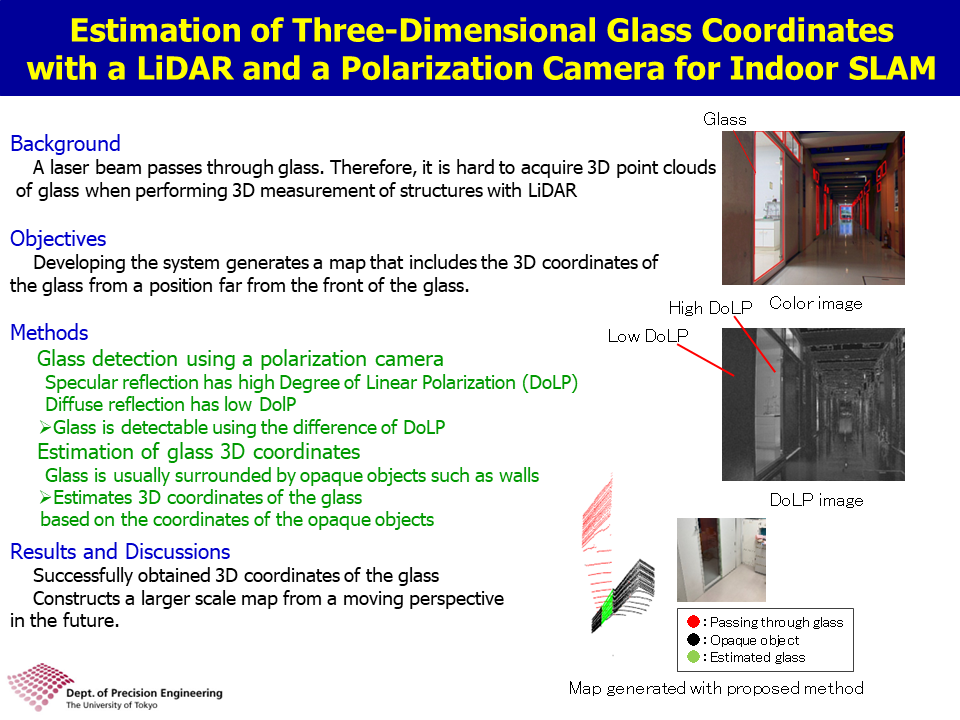
ステレオ偏光カメラとプロジェクタを用いた屋内ガラス環境での地図生成 Mapping of Indoor Environment with Glass Using Stereo Polarization Camera and Projector |
就職 |
| 修士 49 |
田倉 竜也 Tatsuya Takura |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
イベントカメラを用いた相対速度に依存しない物体検出 Event-based Robust Object Detection Invariant to Relative Velocity |
就職 |
| 修士 50 |
田中 健太郎 Kentaro Tanaka |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
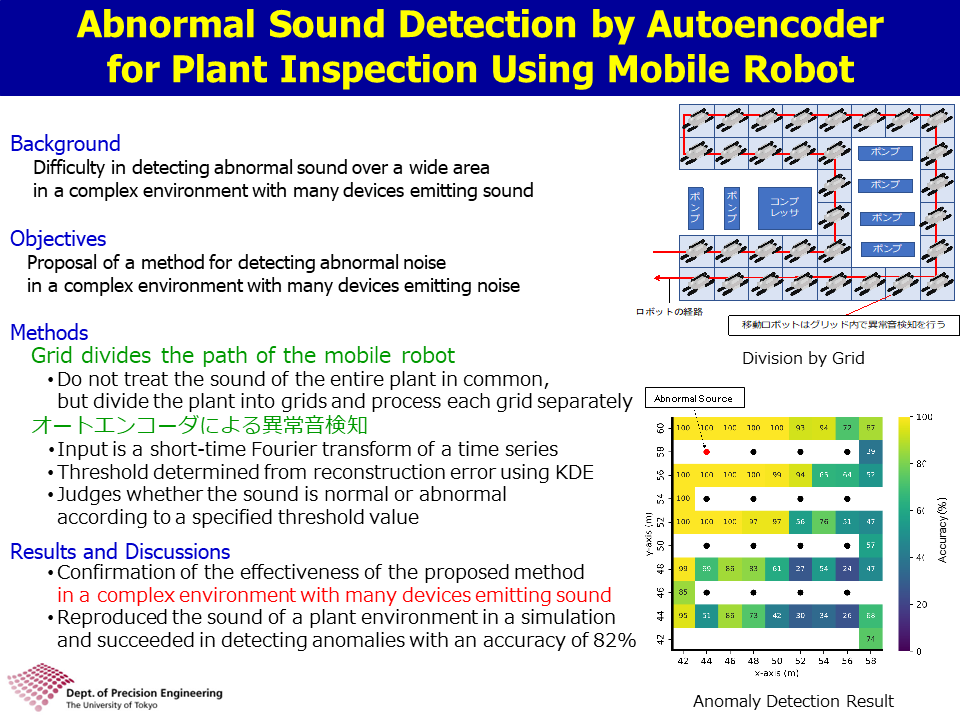
正常音の空間マッピングに基づく石油精製プラント内の異常の検出と位置特定 Detection and Localization of Abnormalities in Oil Refinery Plants Based on Spatial Mapping of Normal Sounds |
就職 |
| 修士 51 |
松田 恭岳 Yasutake Matsuta |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
積込待機時間中の準備作業を考慮した油圧ショベルの掘削動作計画 Digging Motion Planning for Excavators Considering Preparation Work during Loading Waiting Time |
就職 |
| 修士 52 |
山口 勇希 Yuki Yamaguchi |
 |
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
シミュレーション学習とドメイン適応を用いたフラットケーブル挿入のためのリーチング動作の生成 Generation of Reaching Motions for Flat Cable Insertion Task Using Simulation Learning and Domain Adaptation |
就職 |
| 修士 53 |
金 容民 Yongmin Kim |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2025年3月 |
Vision-Language ModelsとVision Expertsを用いた複数の異常を説明可能な工業製品における異常検知 Explainable Detection of Multiple Anomalies in Industrial Products Using Vision-Language Models and Vision Experts |
博士進学 松尾研 |
| 修士 54 |
李 晙源 Junwoon Lee |
|
東京大学大学院 新領域創成科学研究科 人間環境学専攻 |
山下 淳 | 2023年4月 ~ 2025年3月 |
極限・劣化環境のためのマルチモーダル情報を用いた切替型SLAM Switching-based Multi-modal SLAM for Extreme and Degraded Environments |
博士進学 山下研 |
| 学部 25 |
髙村 映 Aki Takamura |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2024年4月 ~ 2025年3月 |
パーキンソン病患者における重心移動の認識とバランス能力の関係性の分析 Analysis of Relationship between Awareness of Center of Gravity Shift and Balance Ability in Patients with Parkinson’s Disease |
修士進学 山下研 |
| 学部 26 |
若松 宥太 Yuta Wakamatsu |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2024年4月 ~ 2025年3月 |
起立動作中に手すりにかかる力データを用いた高齢者の下肢機能評価 Assesment of Lower Extremities Function Using Forces Applied to Handrail during Sit-to-Stand Motion of the Elderly |
修士進学 安研 |
| 学部 | 髙村 悠真 Yuma Takamura |
 |
東京大学 工学部 精密工学科 |
安 琪 | 2024年4月 ~ 2025年3月 |
協働ロボットのための全方位マルチカメラシステムを用いた人検出 Human Detection for Collaborative Robot Using Omnidirectional Multi-camera System |
修士進学 山下研 |
| 学部 | 星井 智仁 Tomohito Hoshii |
 |
東京大学 工学部 精密工学科 |
安 琪 | 2024年4月 ~ 2025年3月 |
移動ロボットによる視覚点検のための3次元形状推定を用いた変化検知 Change Detection for Visual Inspection by Mobile Robot Using Three-Dimensional Shape Estimation |
修士進学 山下研 |
| 交 換 留 学 生 |
Genghang Zhuang |  |
Technical University of Munich Germany |
山下 淳 | 2024年5月 ~ 2024年6月 |
Biologically-inspired SLAM and Perception | - |
| 交 換 留 学 生 |
Louis Le Lay |  |
Sorbonne University France |
山下 淳 | 2024年6月 ~ 2024年8月 |
- | - |
| 交 換 留 学 生 |
岡田 翼 Tsubasa Okada |
 |
University of Michigan USA |
山下 淳 | 2024年7月 ~ 2024年8月 |
- | - |
| 交 換 留 学 生 |
Dylan Robles |  |
University of Michigan USA |
山下 淳 | 2024年7月 ~ 2024年8月 |
- | - |
| 交 換 留 学 生 |
Young-woon Song |  |
Pohang University of Science and Technology Korea |
松日楽 信人 | 2024年8月 ~ 2024年9月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Kanzhong Yao |  |
The University of Manchester UK |
松日楽 信人 | 2024年9月 ~ 2024年10月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Dorian Hans |  |
FH Aachen - University of Applied Sciences Germany |
山下 淳 | 2024年9月 ~ 2024年12月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Christopher Bishop |  |
The University of Manchester UK |
松日楽 信人 | 2024年10月 ~ 2024年11月 |
NEST Fellow | - |
| 交 換 留 学 生 |
Selina Tau |  |
FH Aachen - University of Applied Sciences Germany |
松日楽 信人 | 2024年11月 ~ 2024年12月 |
NEST Fellow | - |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 博士 12 |
井倉 幹大 Mikihiro Ikura |
|
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2020年4月 ~ 2023年9月 |
高速カメラとイベントカメラを用いた高速かつ悪環境に対して頑健なセンシングシステム Robust Visual Sensing Systems against Fast and Adverse Environments Using High-speed and Event-based Cameras |
特任研究員 |
| 修士 40 |
呉 初婕 Chujie Wu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2021年10月 ~ 2023年9月 |
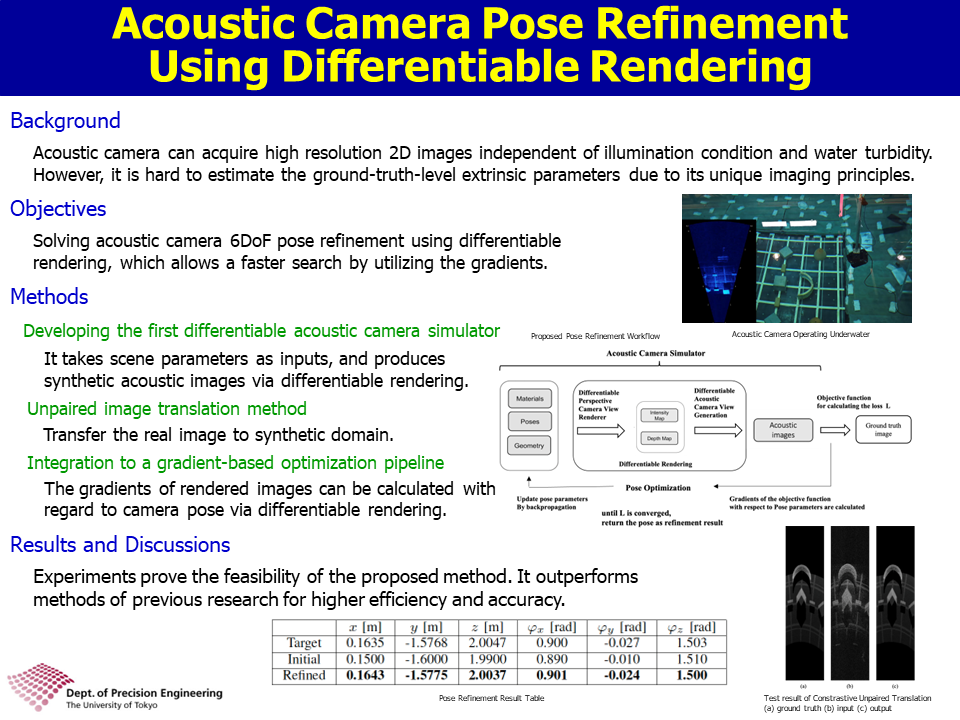
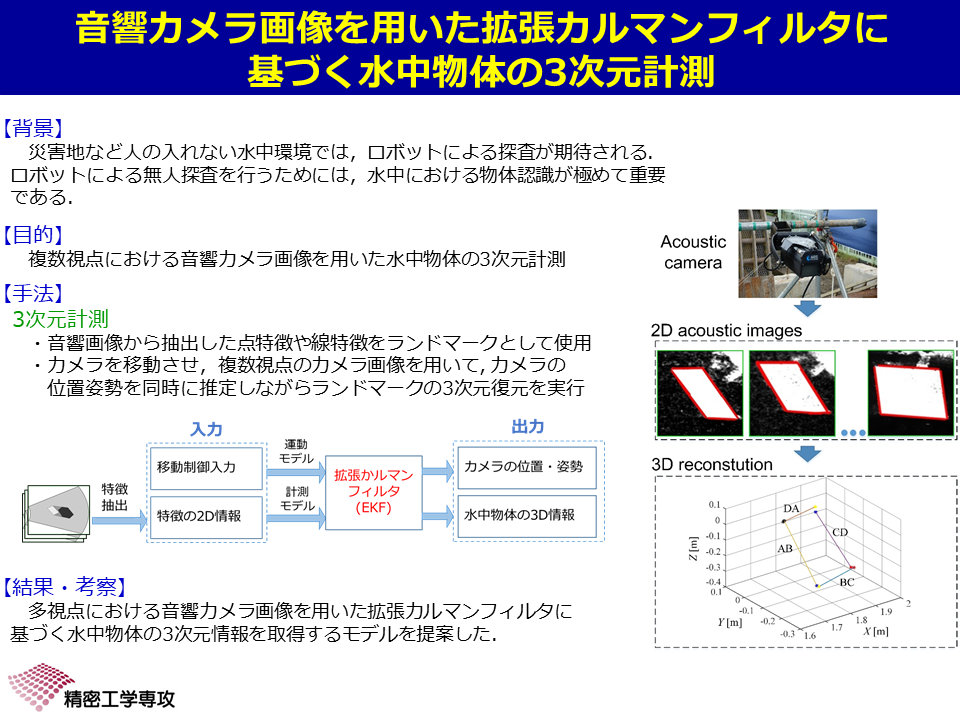
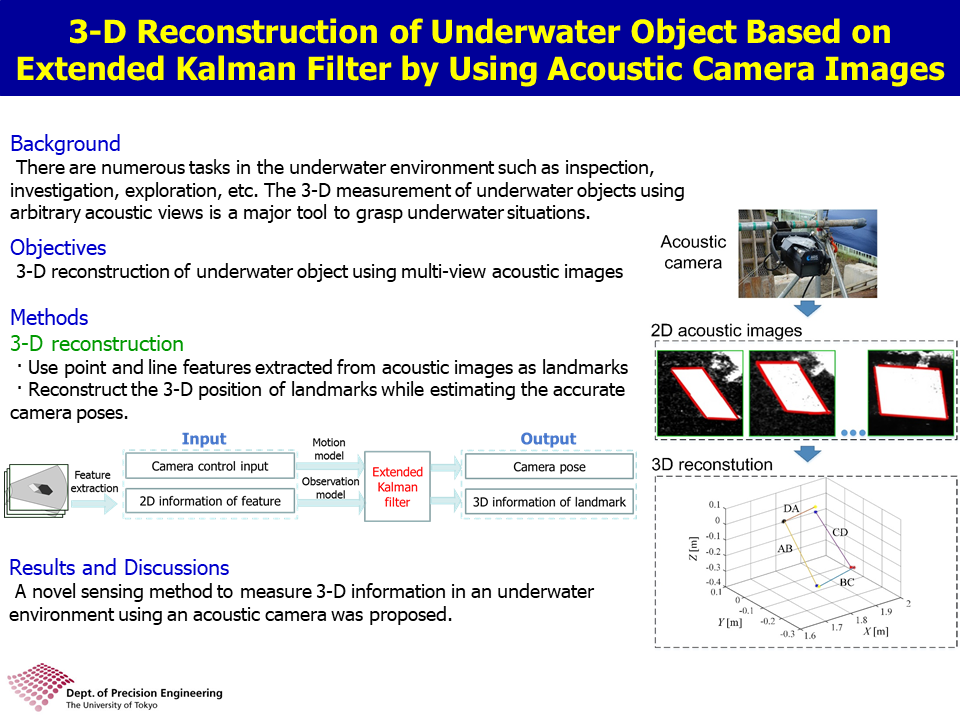
微分可能な音響カメラシミュレーションによるカメラ位置姿勢と物体反射率の推定 Camera Pose and Object Reflectance Estimation Using Differentiable Acoustic Camera Simulation |
就職 |
| 修士 41 |
清水 進 Susumu Shimizu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2024年3月 |
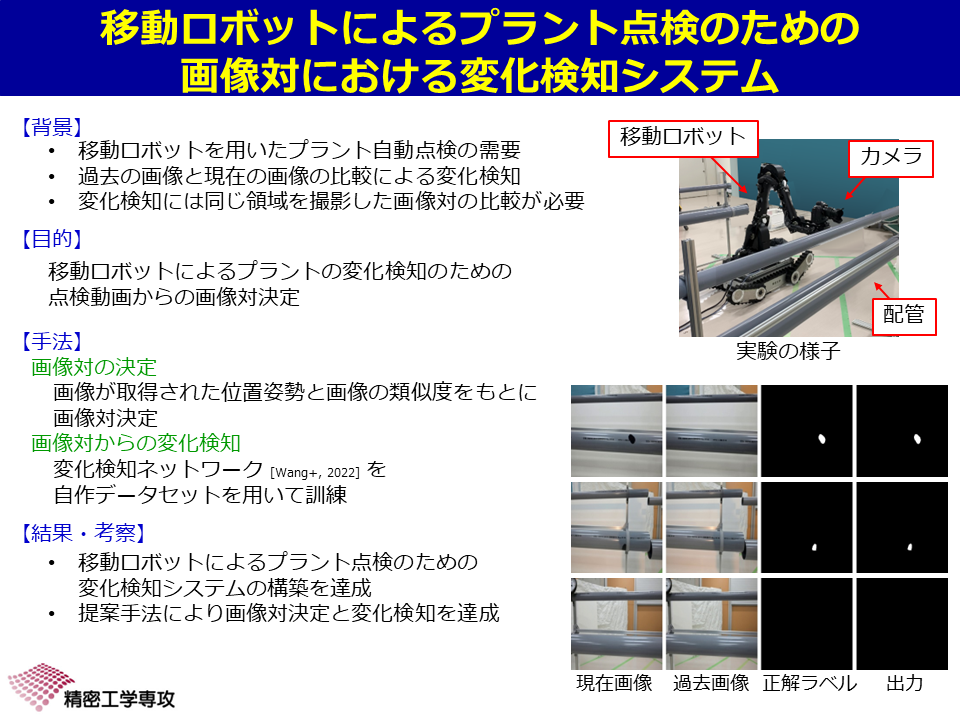
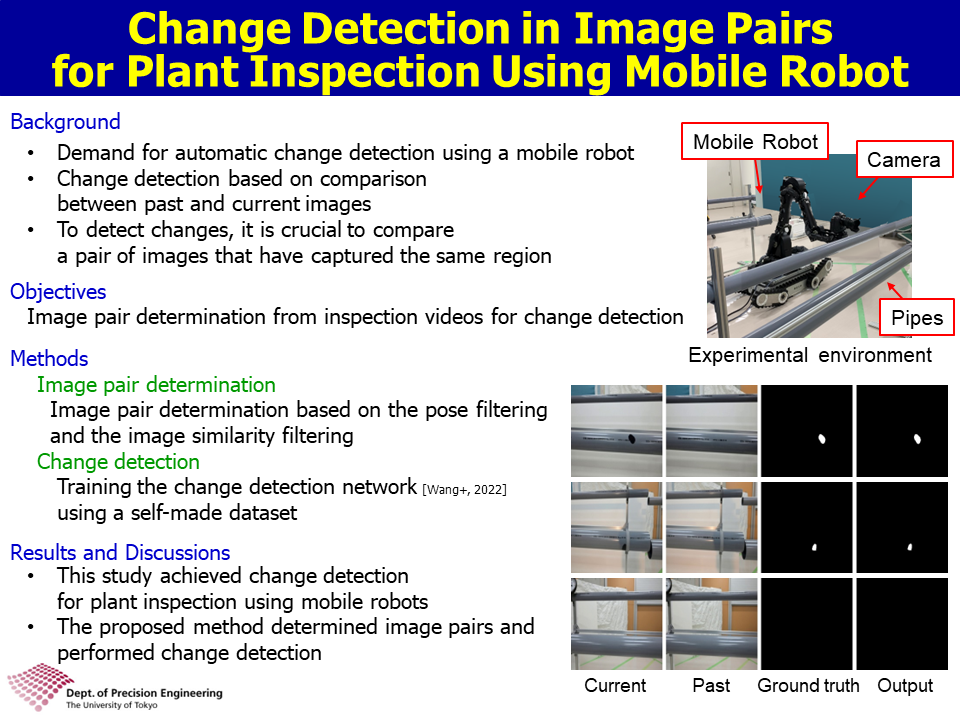
移動ロボットによるプラント点検のための画像対における変化検知システム Change Detection System in Image Pairs for Plant Inspection Using Mobile Robot |
就職 |
| 修士 42 |
山下 佳威 Kai Yamashita |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2024年3月 |
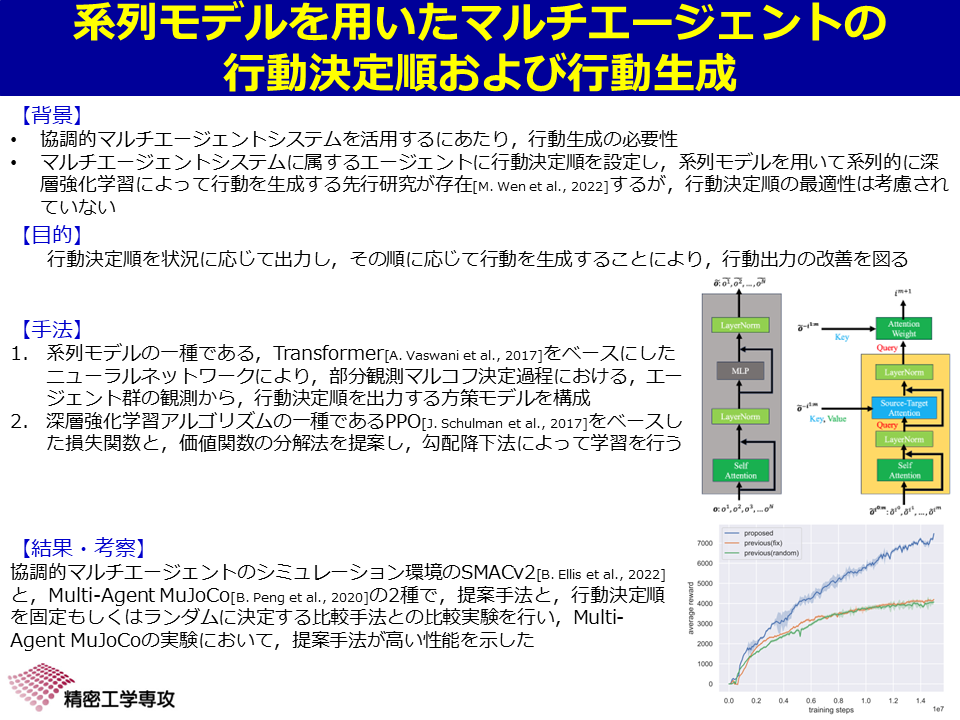
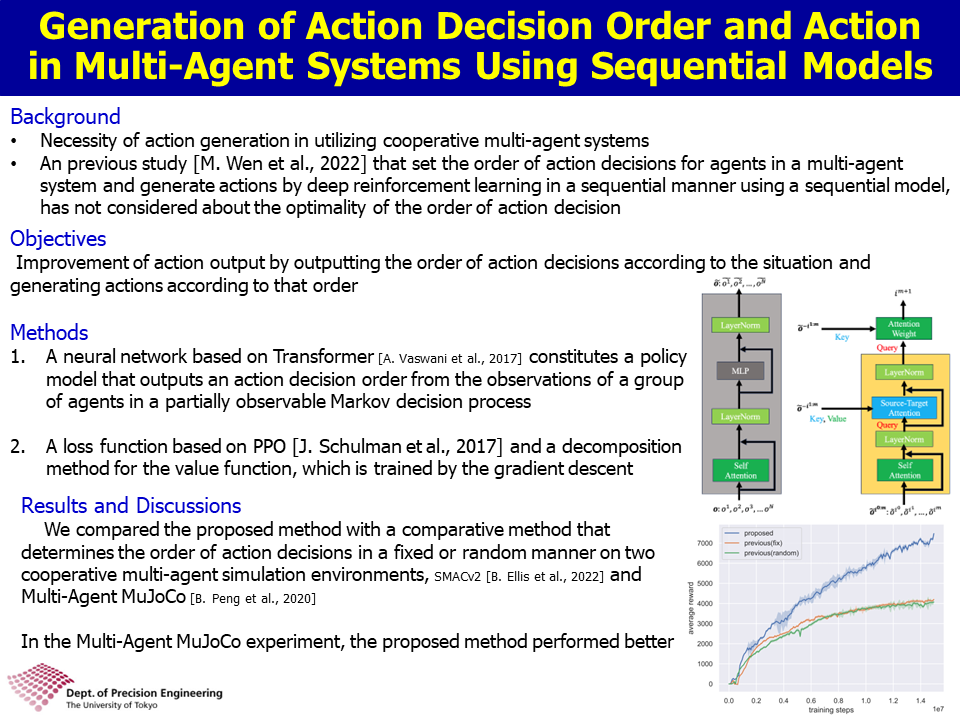
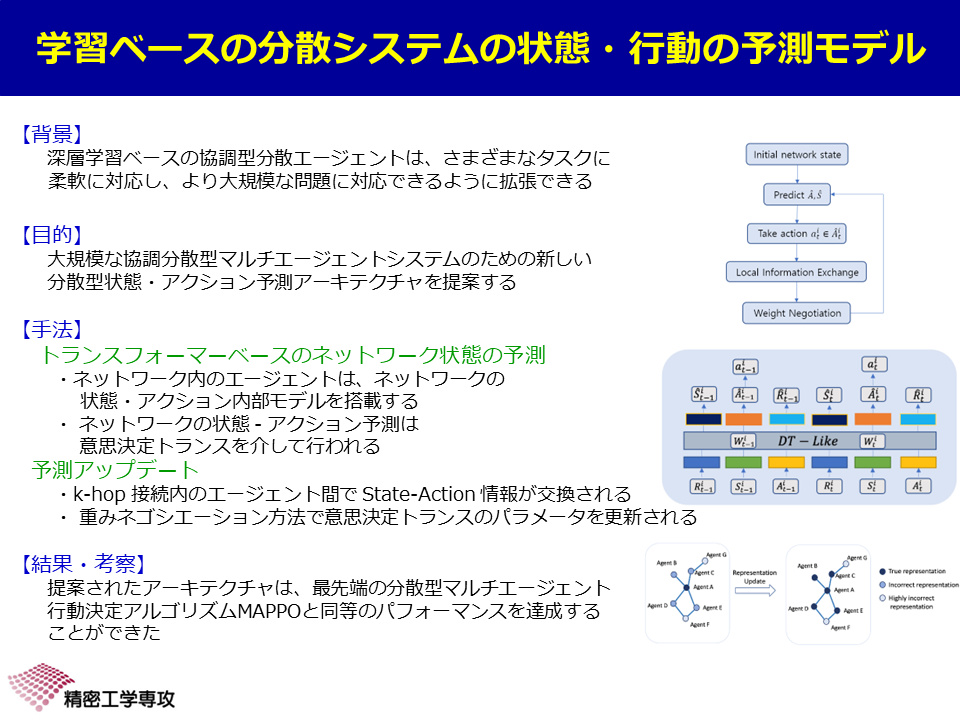
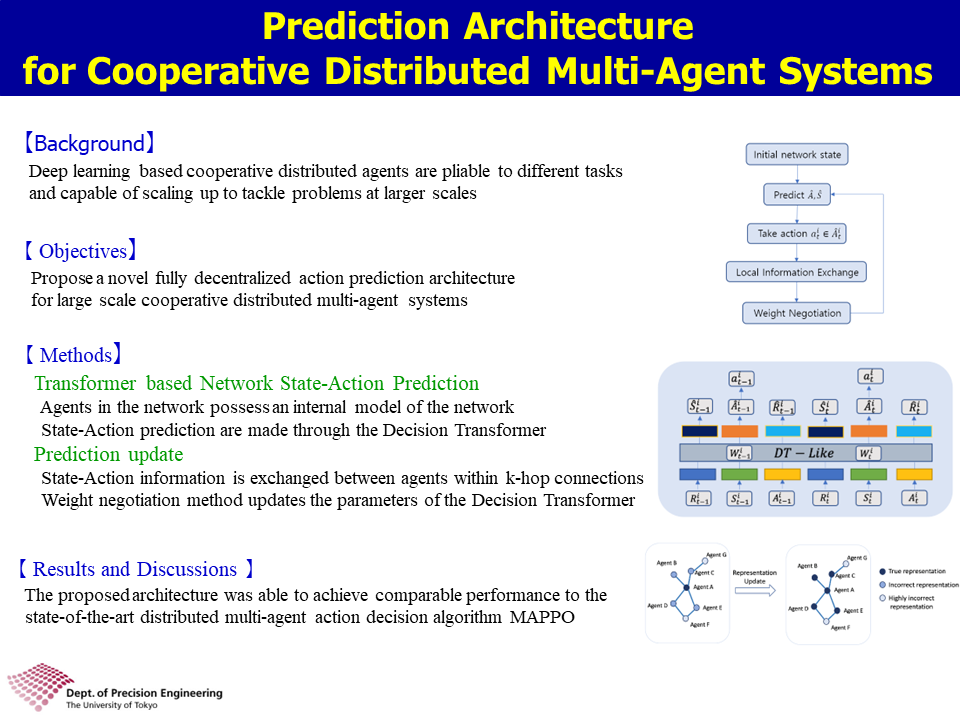
系列モデルを用いたマルチエージェントの行動決定順および行動生成 Generation of Action Decision Order and Action in Multi-Agent Systems Using Sequential Models |
博士進学 松尾研 |
| 修士 43 |
陳 童 Tong Chen |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2024年3月 |
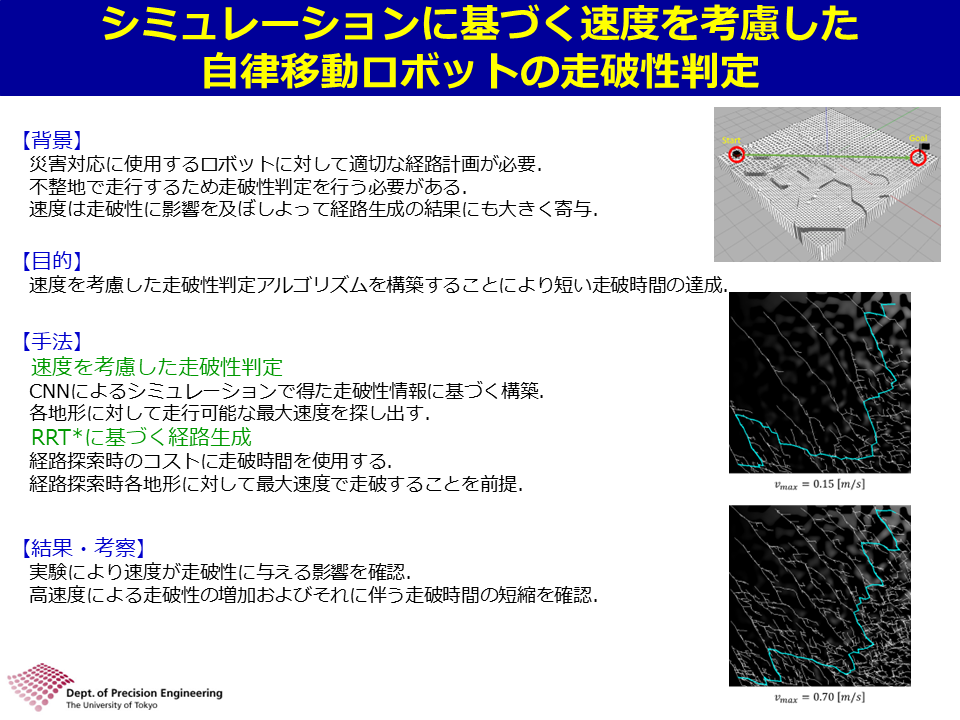
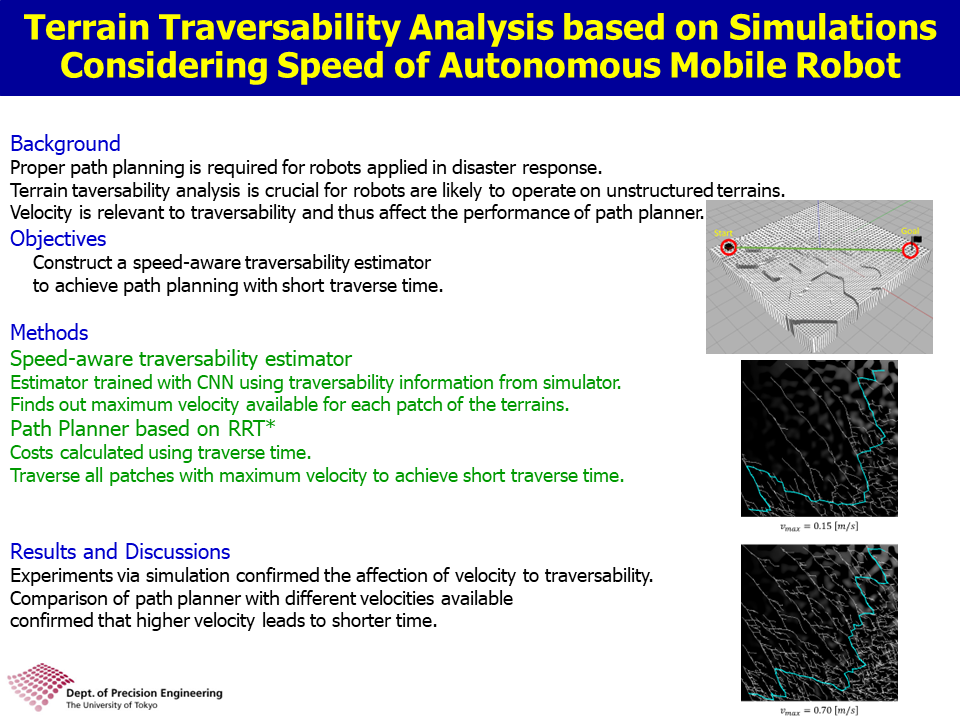
シミュレーションに基づく速度を考慮した自律移動ロボットの走破性判定 Terrain Traversability Analysis based on Simulations Considering Speed of Autonomous Mobile Robot |
博士進学 山下研 |
| 修士 44 |
羅 爾翔 Erxiang Luo |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2022年4月 ~ 2024年3月 |
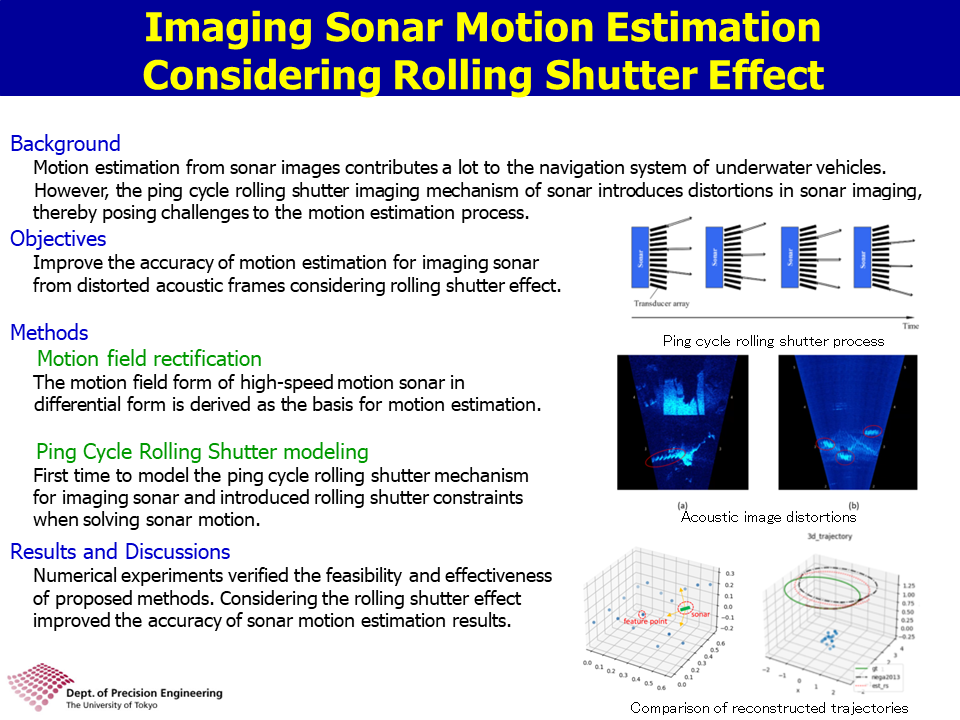
ローリングシャッター効果を考慮したイメージングソナーの運動推定 Imaging Sonar Motion Estimation Considering Rolling Shutter Effect |
博士進学 大竹研 |
| 学部 23 |
内山 裕稀 Yuki Uchiyama |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2023年4月 ~ 2024年3月 |
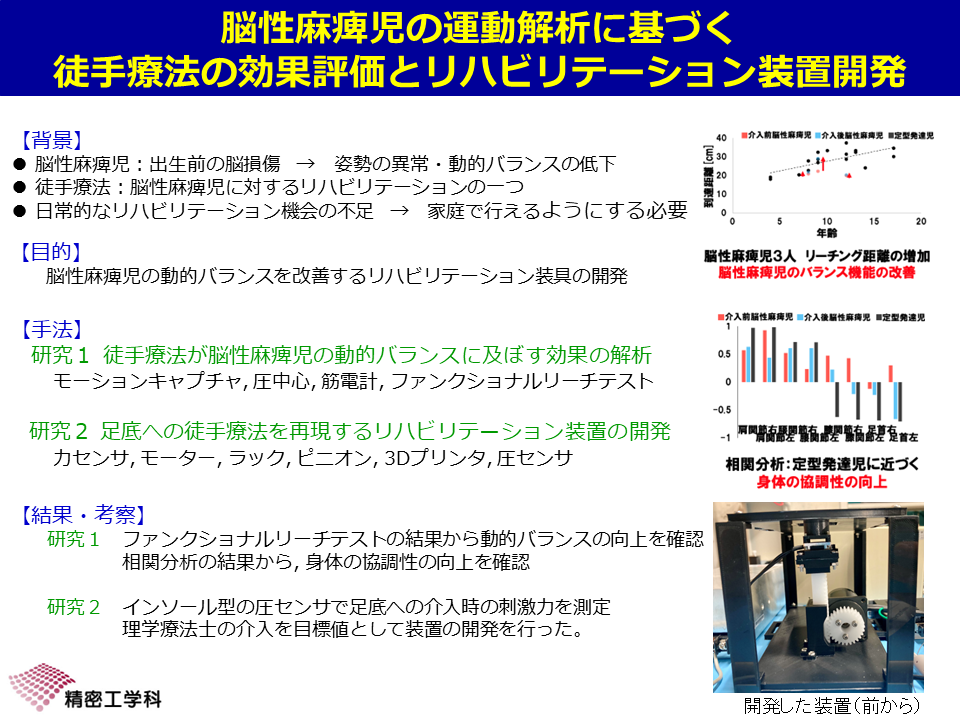
脳性麻痺児の運動解析に基づく徒手療法の効果評価とリハビリテーション装置開発 Evaluation of Manual Therapy Based on the Kinematic Analysis of Children with Cerebral Palsy and Development of Rehabilitation Devices |
修士進学 安研 |
| 学部 24 |
正田 晃己 Koki Shoda |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2023年4月 ~ 2024年3月 |
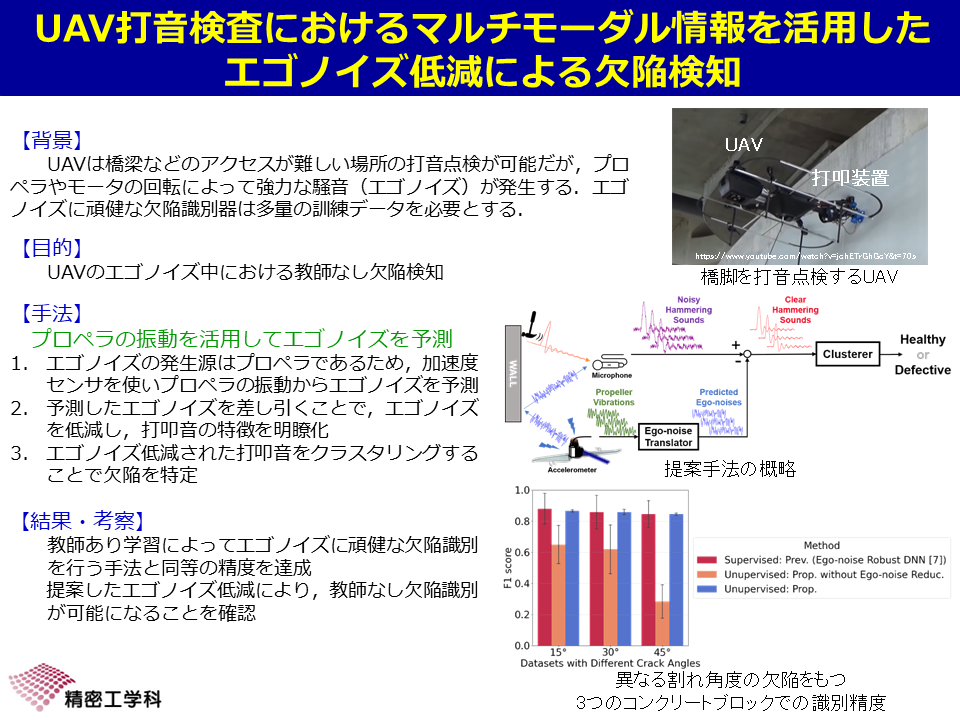
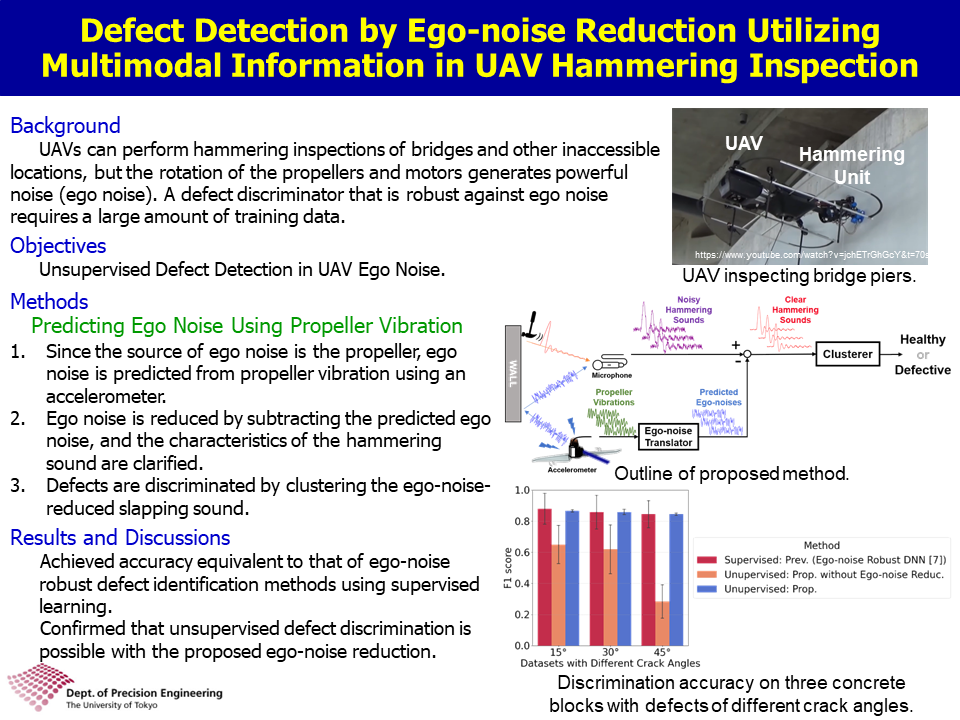
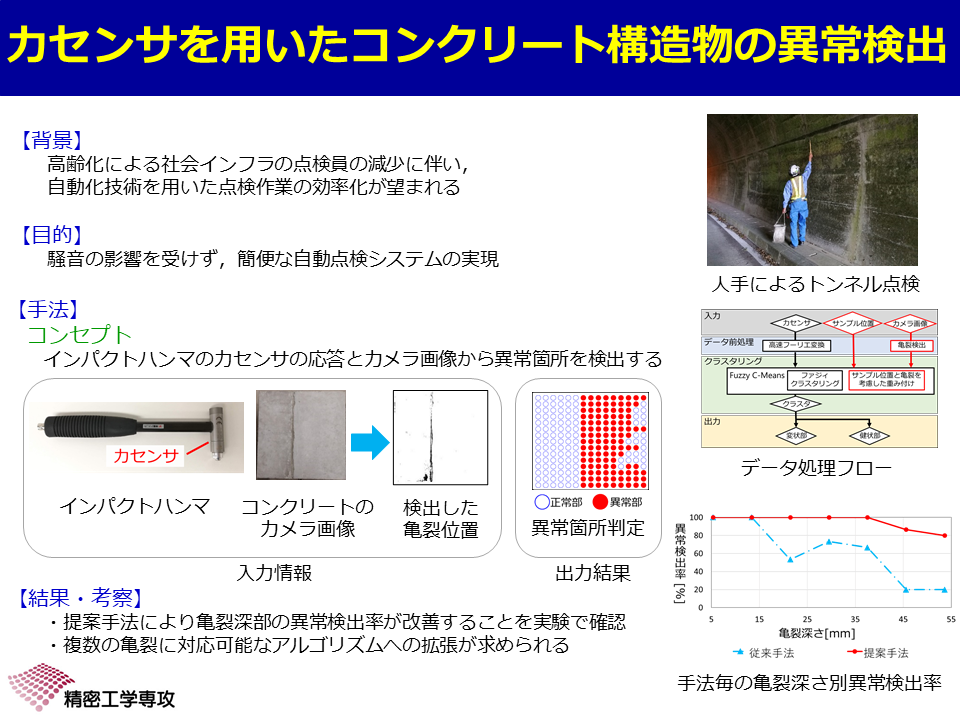
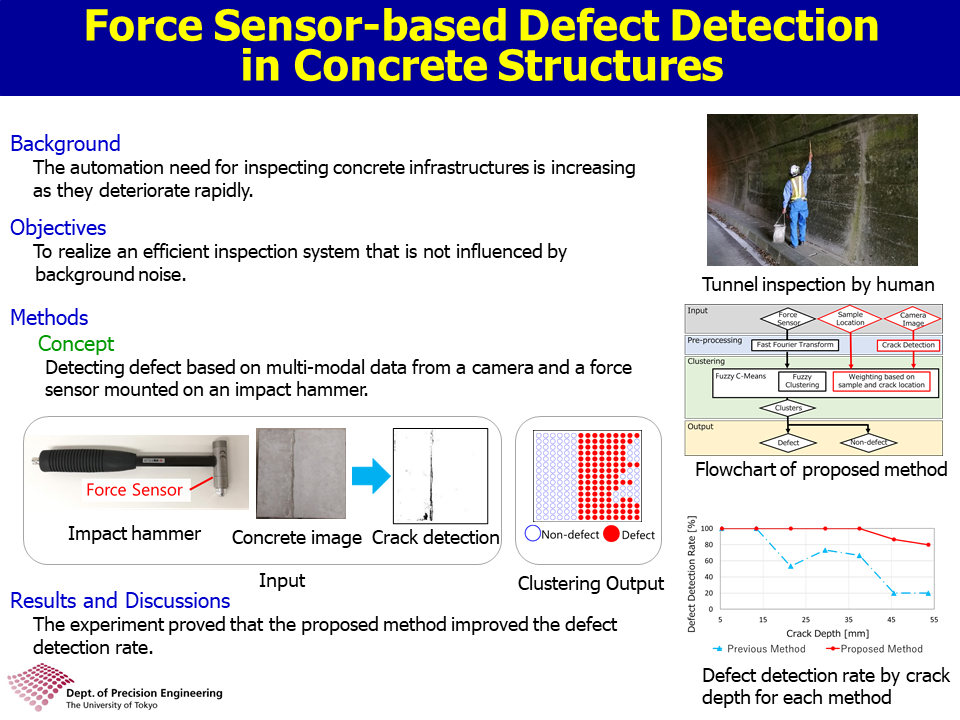
UAV打音検査におけるマルチモーダル情報を活用したエゴノイズ低減による欠陥検知 Defect Detection by Ego-noise Reduction Utilizing Multimodal Information in UAV Hammering Inspection |
修士進学 山下研 |
| 交 換 留 学 生 |
Philipp Knestel |  |
Technical University of Munich Germany |
山下 淳 | 2023年10月 ~ 2024年3月 |
Completion of 3D Point Clouds Derived from 2D Sonar Images Using PCTMA-Net | - |
| 修士 | 圓道 和奏 Wakana Endo |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2021年4月 ~ 2024年3月 |
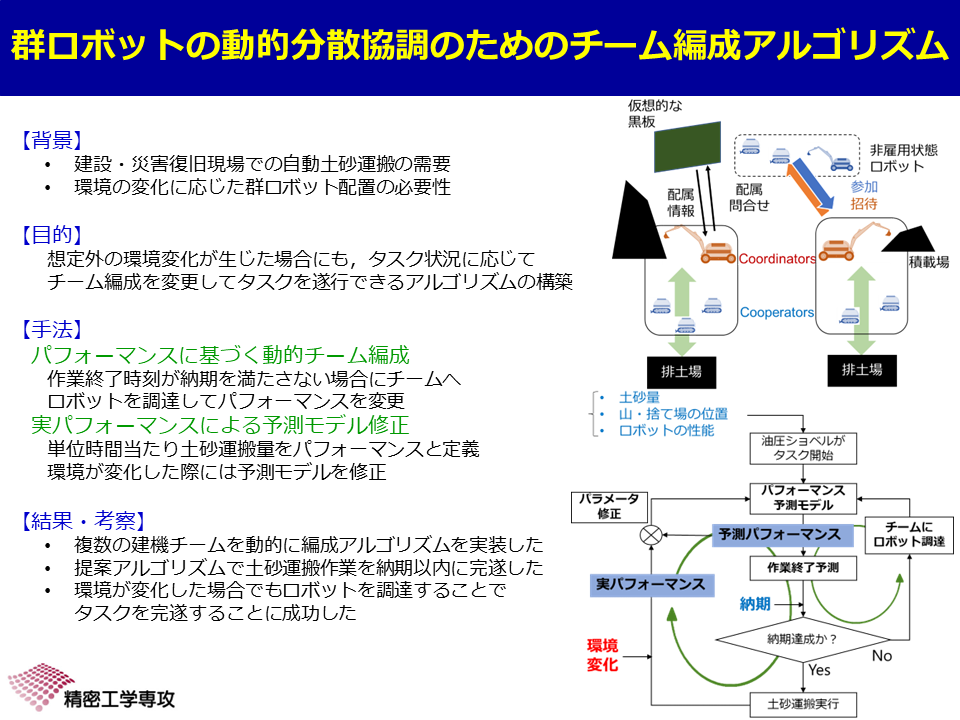
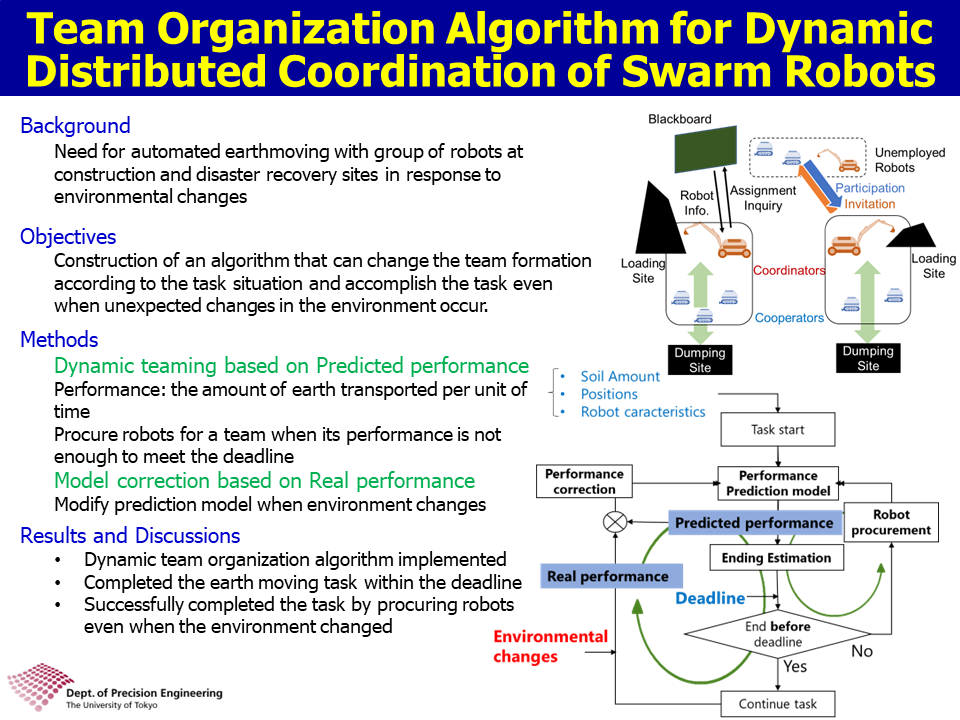
群ロボットの動的分散協調のためのチーム編成アルゴリズム Team Organization Algorithm for Dynamic Distributed Coordination of Swarm Robots |
就職 |
| 修士 | 桂 知弘 Tomohiro Katsura |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2022年4月 ~ 2024年3月 |
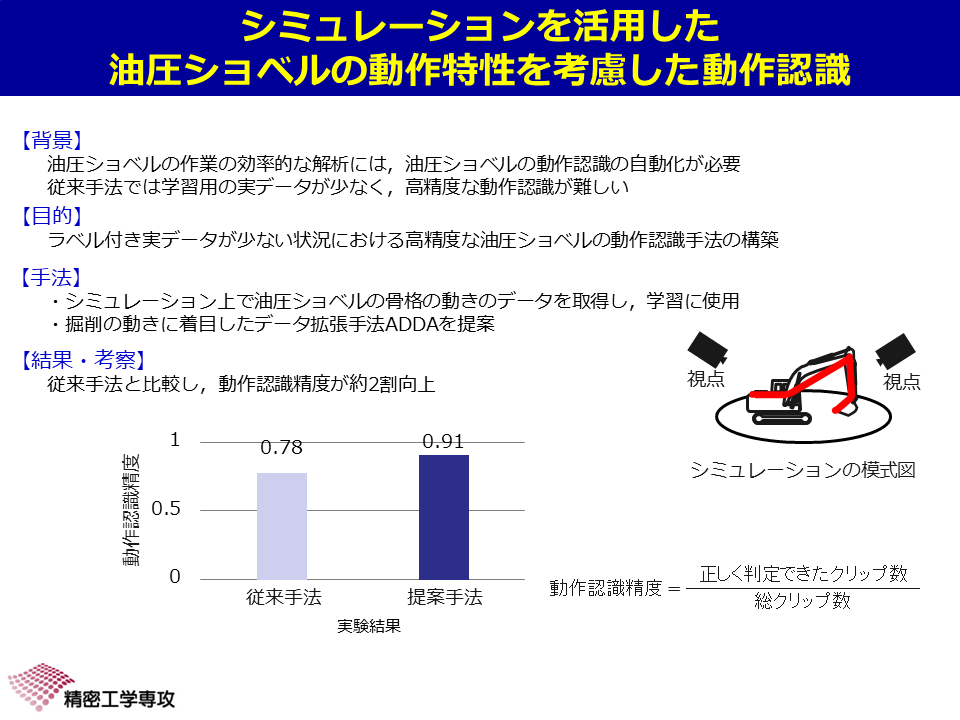
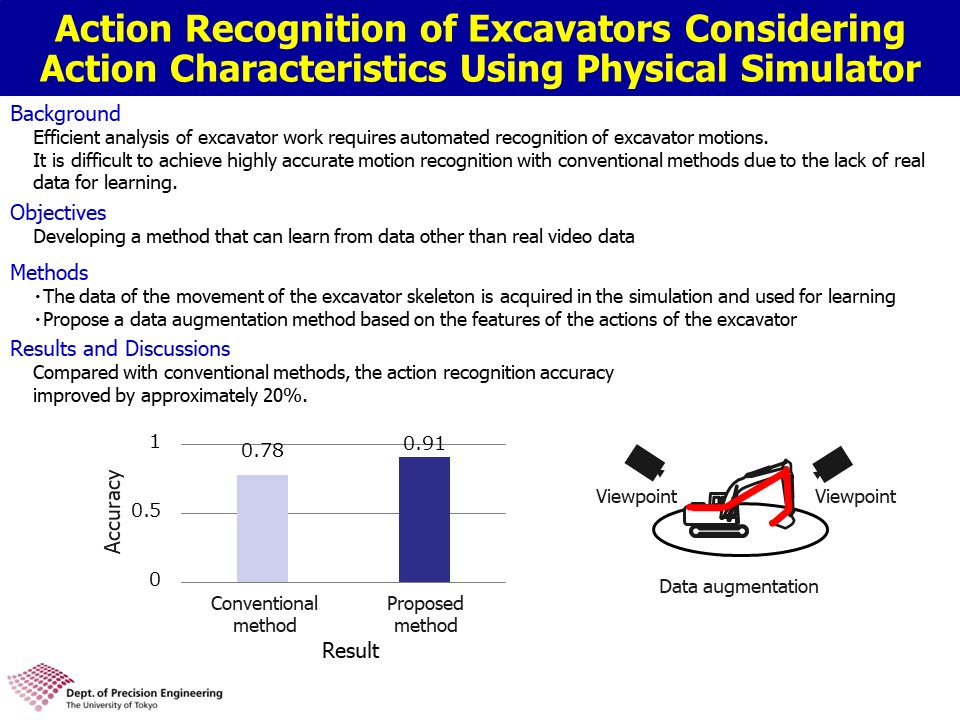
シミュレーションを活用した油圧ショベルの動作特性を考慮した動作認識 Action Recognition of Excavators Considering Action Characteristics Using Physical Simulator |
就職 |
| 修士 | 成川 文堂 Ayato Narikawa |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2022年4月 ~ 2024年3月 |
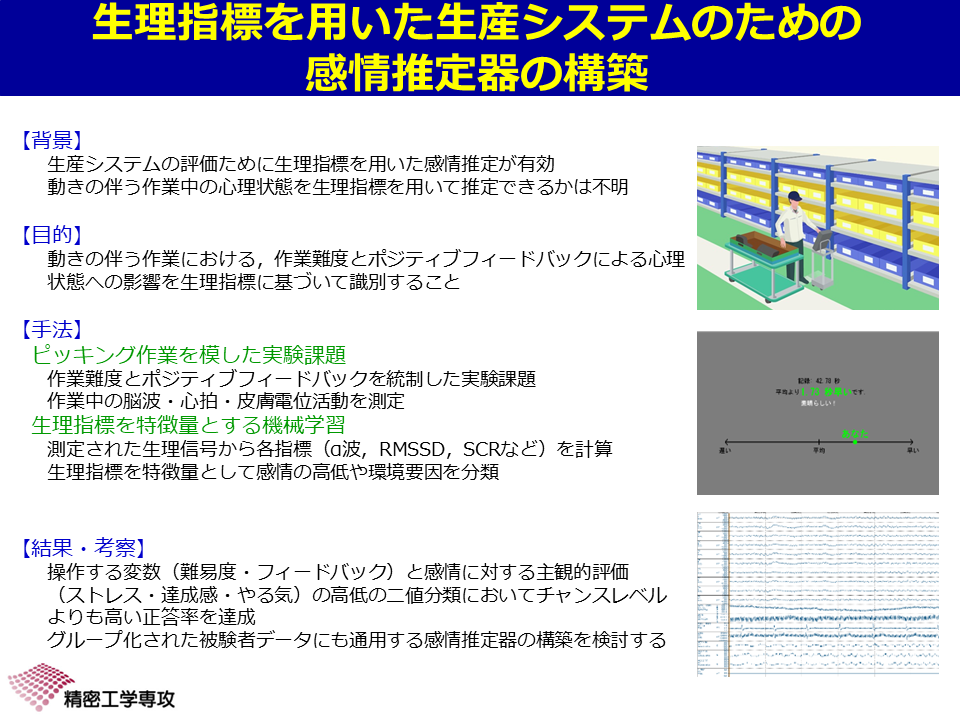
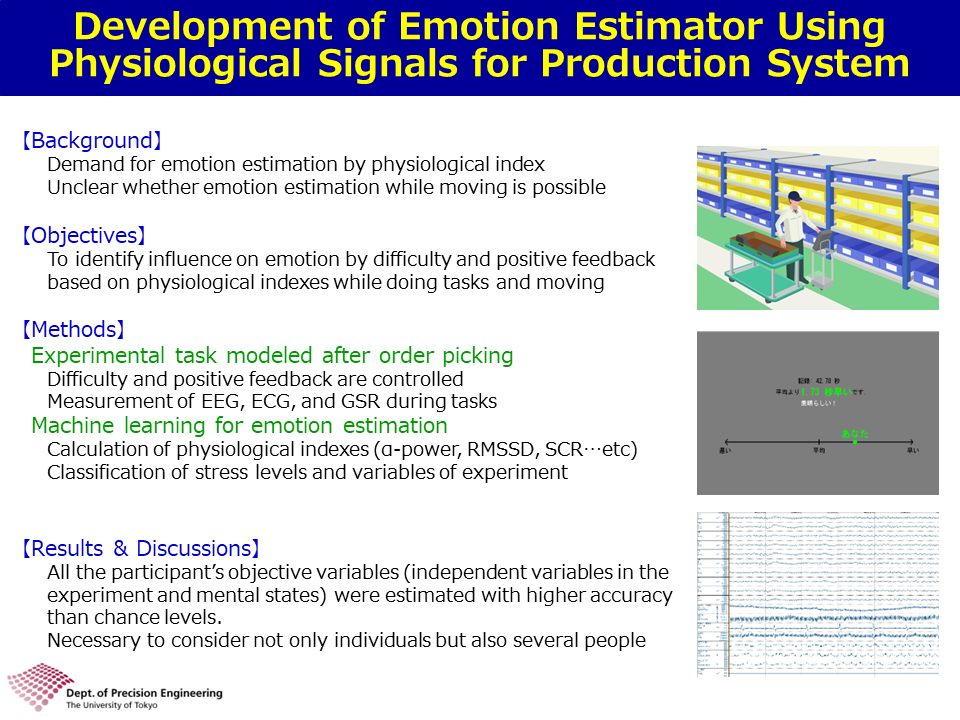
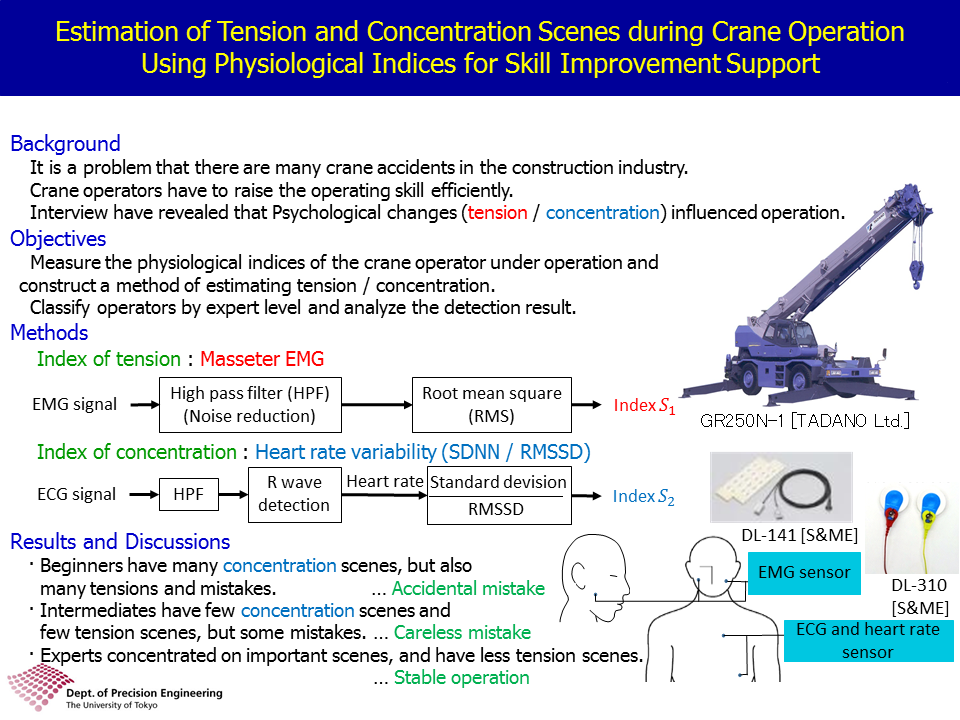
生産システムのための生理指標に基づく感情推定器の構築 Development of Emotion Estimator Using Physiological Signals for Production System |
就職 |
| 学部 | 安藤 大生 Taise Ando |
 |
東京大学 工学部 精密工学科 |
安 琪 | 2023年4月 ~ 2024年3月 |
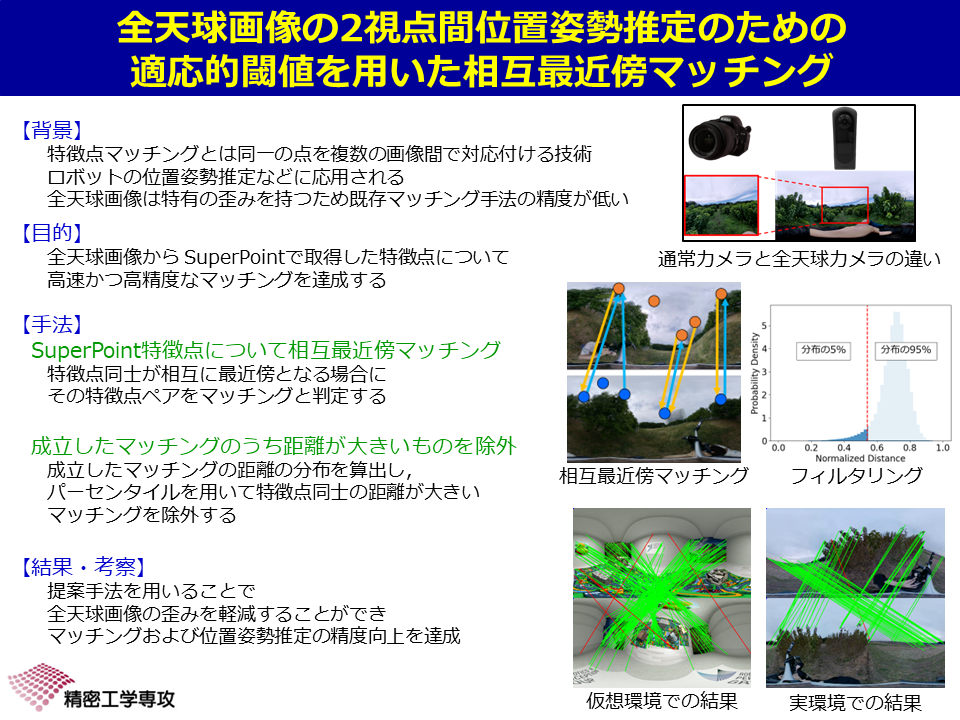
全天球画像の2視点間位置姿勢推定のための適応的閾値を用いた相互最近傍マッチング Mutual Nearest Neighbor Matching Using Adaptive Threshold for Two-View Pose Estimation with Spherical Images |
修士進学 山下研 |
| 学部 | 早瀬 瑞華 Mizuka Hayase |
 |
東京大学 工学部 精密工学科 |
安 琪 | 2023年4月 ~ 2024年3月 |
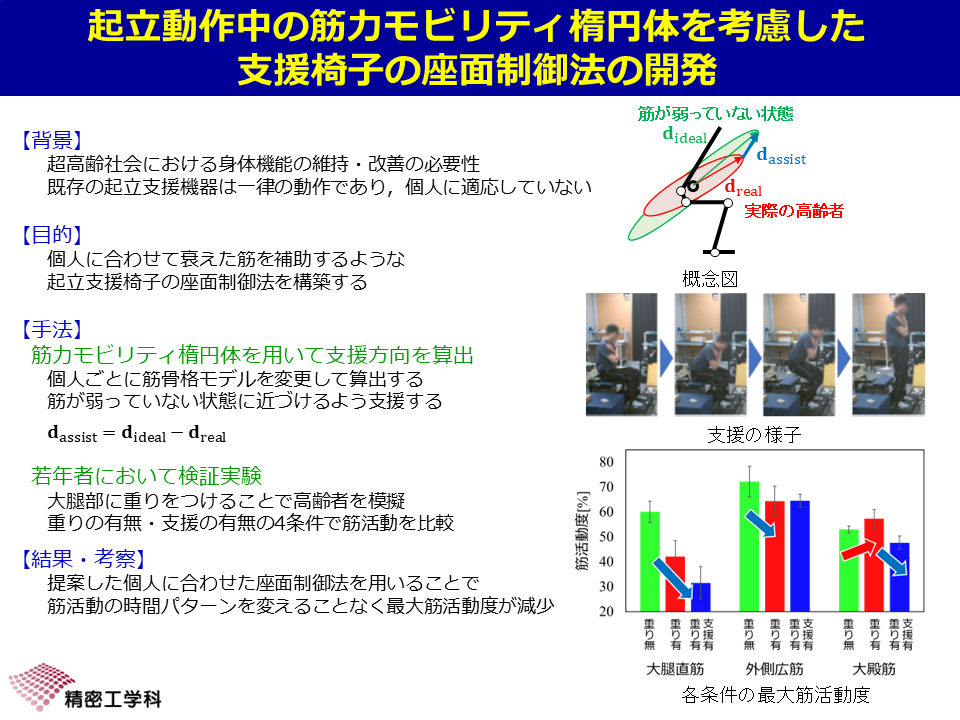
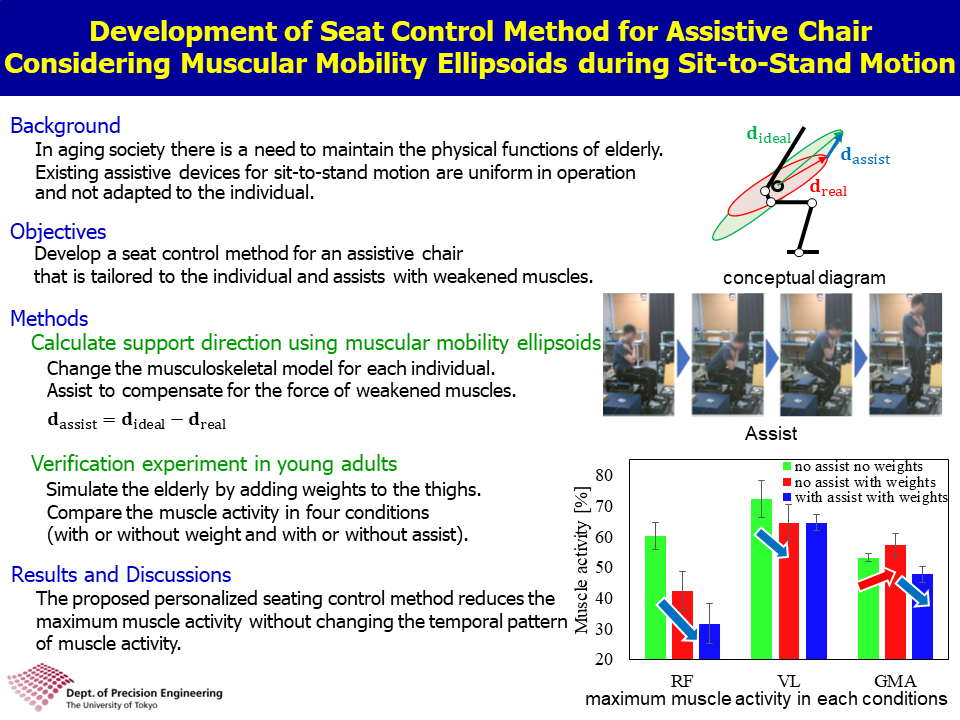
加齢が起立動作中の筋力モビリティ楕円体に与える影響の解析と支援椅子の座面制御法への応用 Analysis of the Effect of Aging on Muscular Mobility Ellipsoids during Sit-to-Stand Motion and Application to Seat Control Method for Assistive Chair |
修士進学 安研 |
| 学部 | 窪田 瞭 Ryo Kubota |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2023年4月 ~ 2024年3月 |
油圧ショベルによる土中岩石の自動掘削のための岩石パラメータ推定 Estimation of Rock Parameters for Automatic Excavation of Subsurface Rocks by Hydraulic Excavator |
修士進学 山下研 |
| 学部 | 森田 英嗣 Eiji Morita |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2023年4月 ~ 2024年3月 |
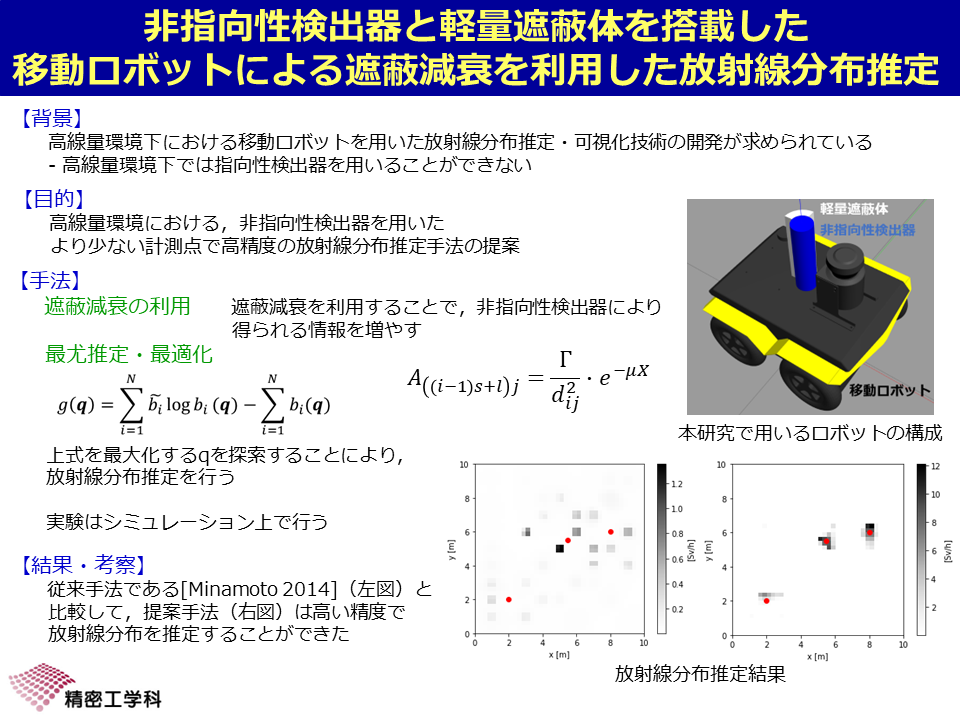
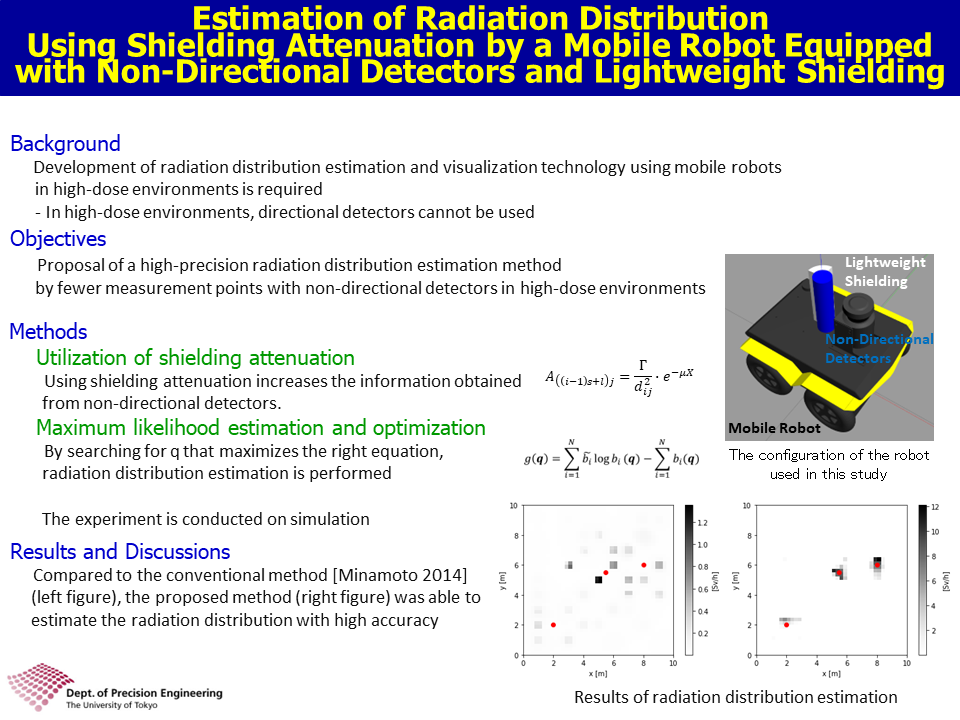
非指向性検出器と軽量遮蔽体を搭載した移動ロボットによる遮蔽減衰を利用した放射線分布推定 Estimation of Radiation Distribution Using Shielding Attenuation by a Mobile Robot Equipped With Non-Directional Detectors and Lightweight Shielding |
修士進学 山下研 |
| 交 換 留 学 生 |
Nassime Jamadi |  |
National Institute of Applied Sciences of Lyon (INSA) France |
安 琪 | 2023年4月 ~ 2023年7月 |
Foot Motion Project | - |
| 指導 委託 学生 |
安積 諒馬 Ryoma Azumi |
 |
九州大学大学院 システム情報科学府 情報理工学専攻 |
安 琪 | 2023年4月 ~ 2024年3月 |
座面の硬度変化における起立特徴の解明と座面硬度を変化させた支援椅子の効果の検証 | 就職 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 博士 8 |
ウィグル イレム İrem Uygur |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2017年9月 ~ 2021年9月 |
Indoor Localization in an Annotated Map Using Object Detection in 360-degree Images | 就職 |
| 博士 9 |
岩村 紀与彦 Kiyohiko Iwamura |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2018年9月 ~ 2021年9月 |
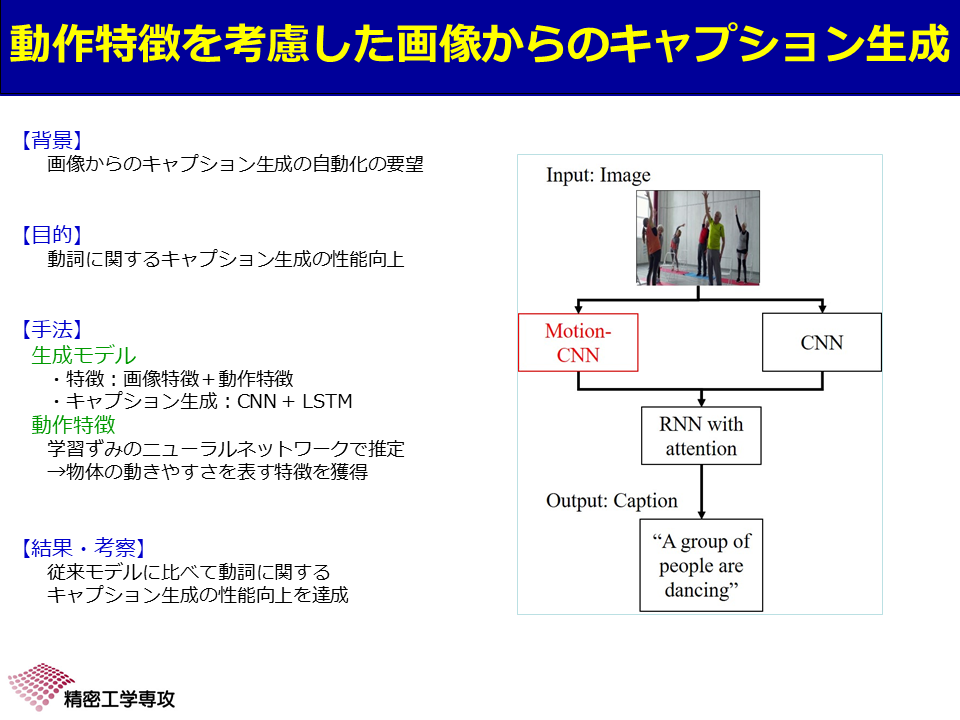
アテンション機構を用いたデータ拡張と動作特徴を考慮した生成モデルによる画像キャプション生成 Image Caption Generation with Attention Mechanism-Based Data Augmentation and Motion Features-Based Captioning Model |
就職 |
| 修士 28 |
陳 偉傑 Weijie Chen |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2019年4月 ~ 2021年9月 |
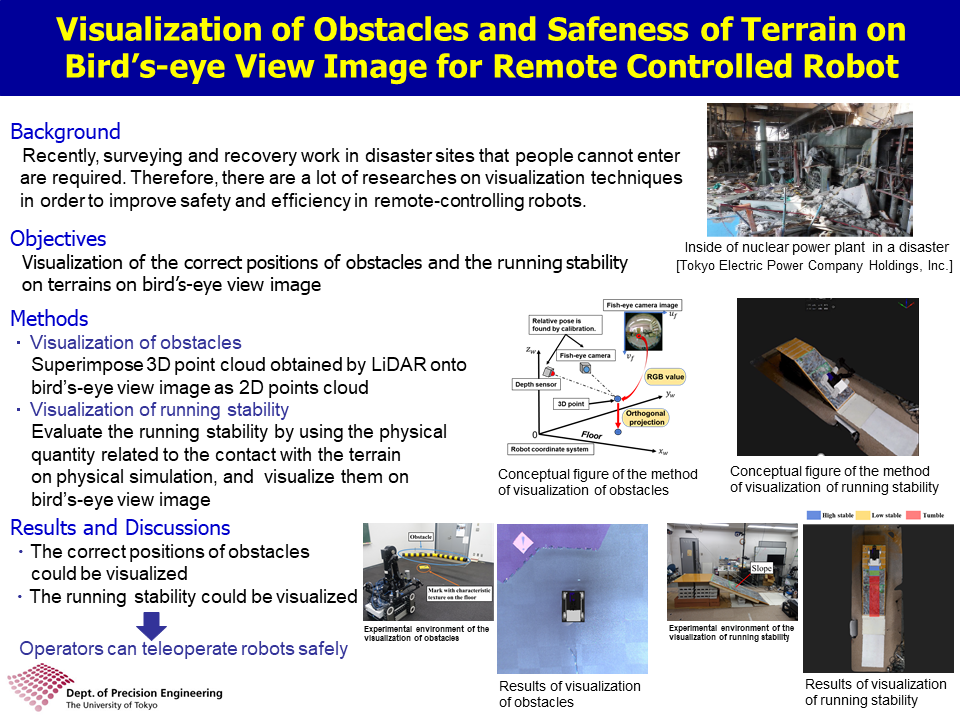
俯瞰映像生成のための消失点を用いた複数魚眼カメラの位置姿勢キャリブレーション Extrinsic Parameters Calibration of Multiple Fisheye Cameras Using Vanishing Points for Bird’s-eye View Generation |
就職 |
| 修士 29 |
劉 丁瑜 Dingyu Liu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2019年9月 ~ 2021年9月 |
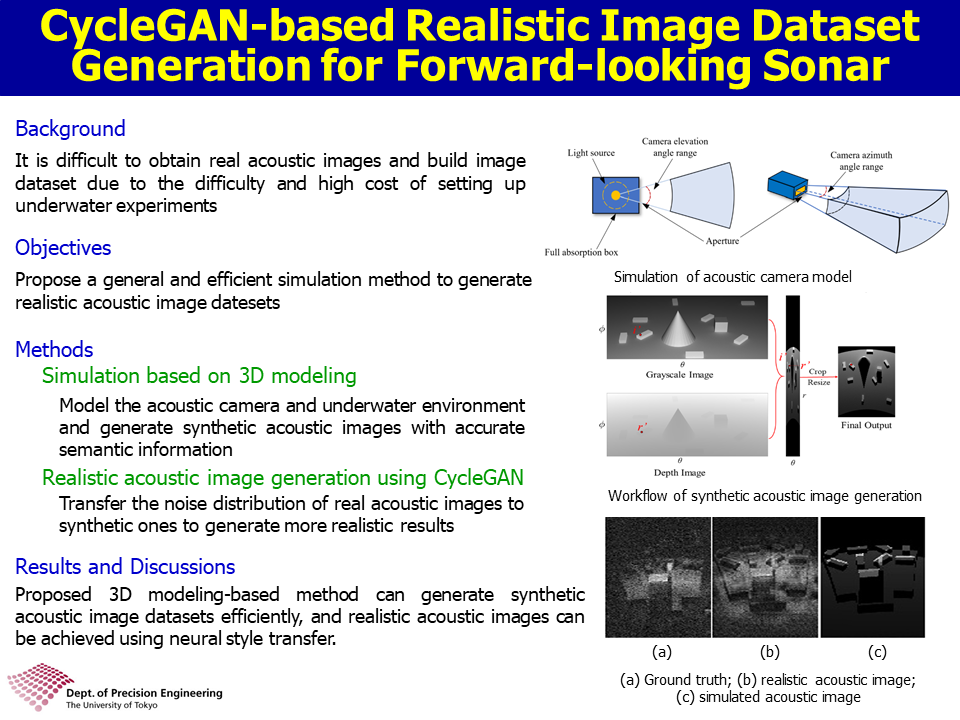
音響画像におけるドメイン適応とその応用 Domain Adaptation and Its Application in Acoustic Images |
就職 |
| 修士 30 |
菅沢 佑太 Yuta Sugasawa |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2020年4月 ~ 2022年3月 |
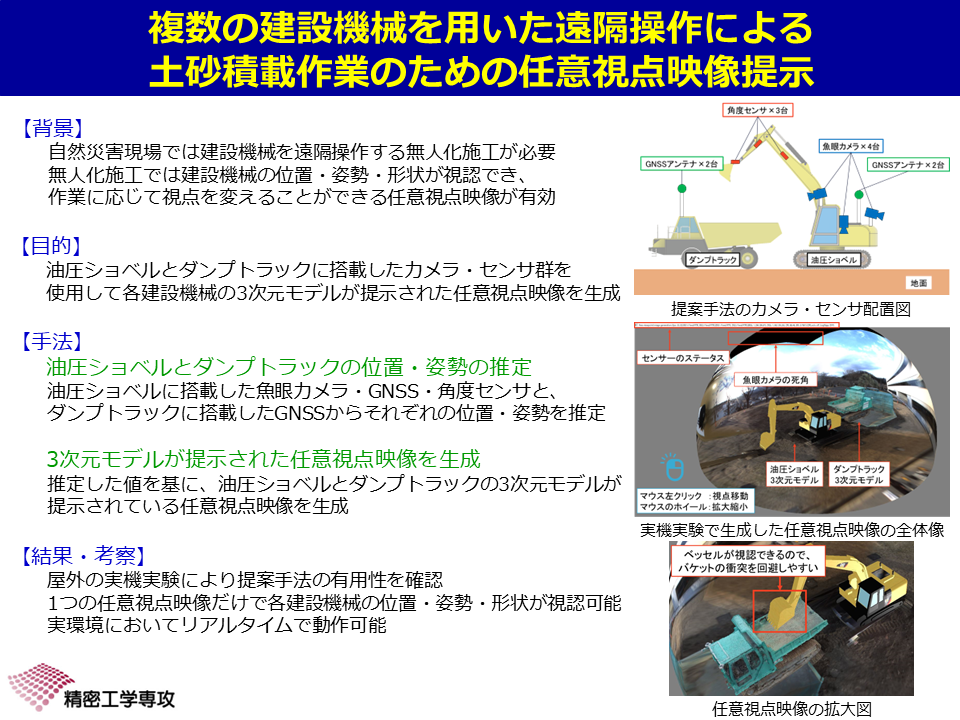
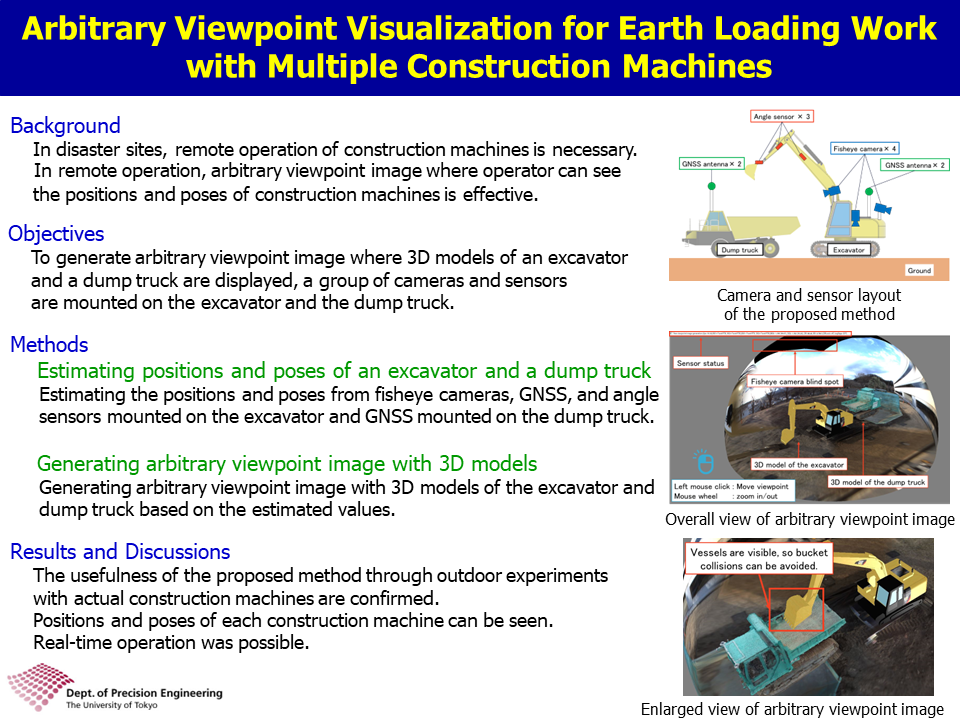
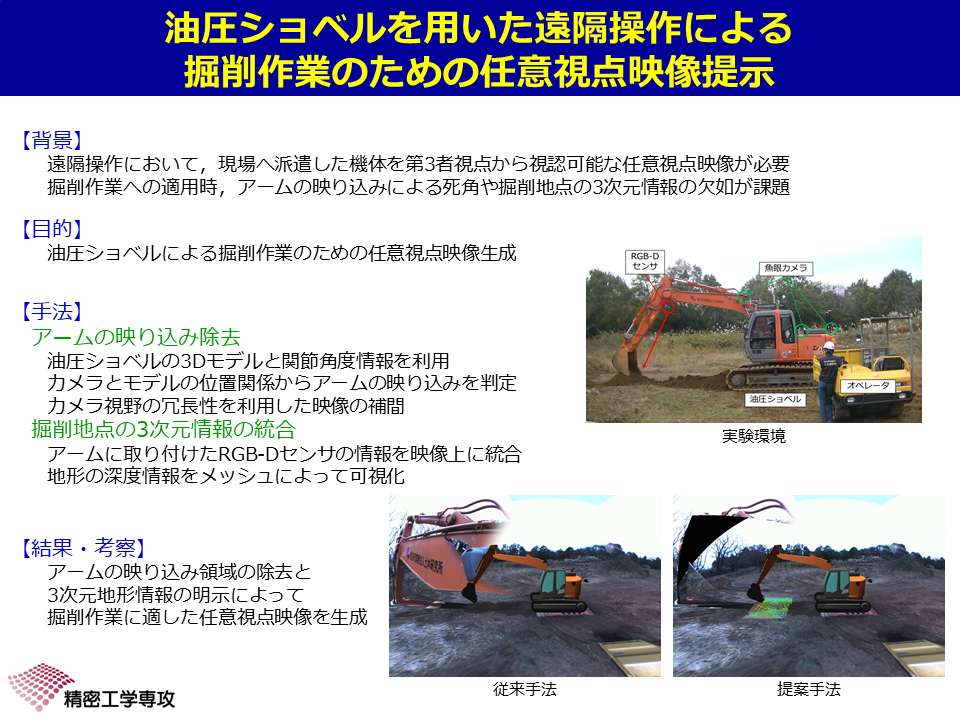
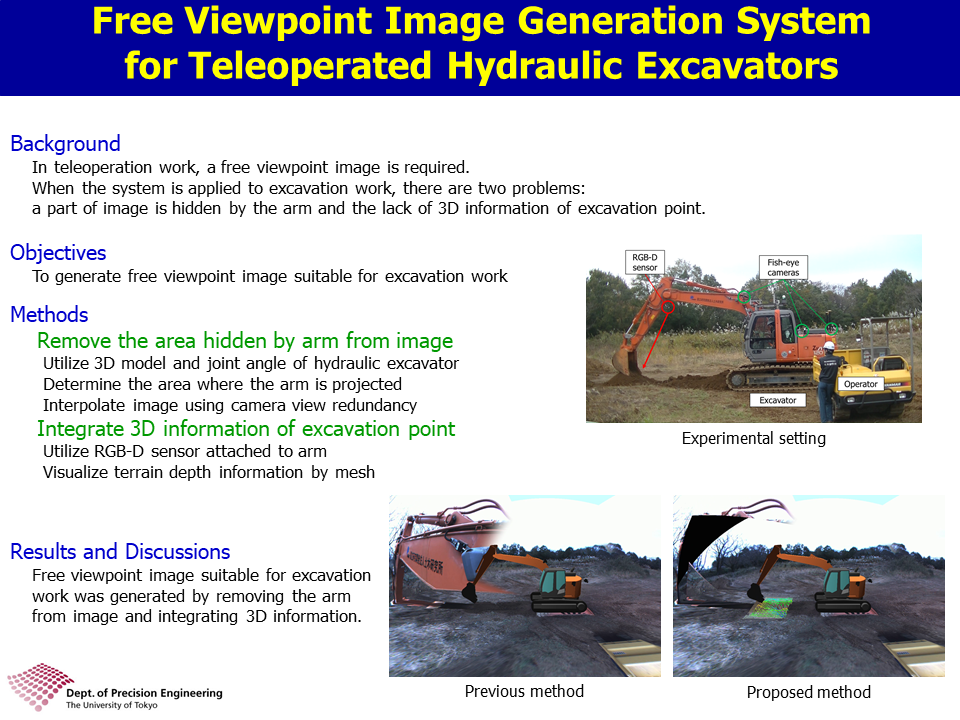
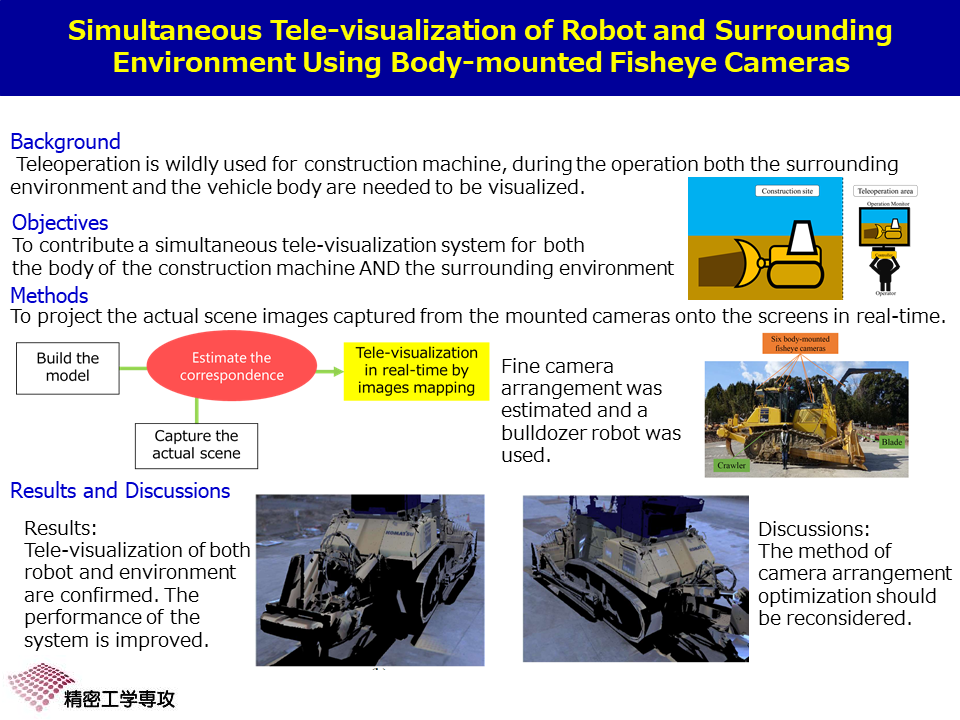
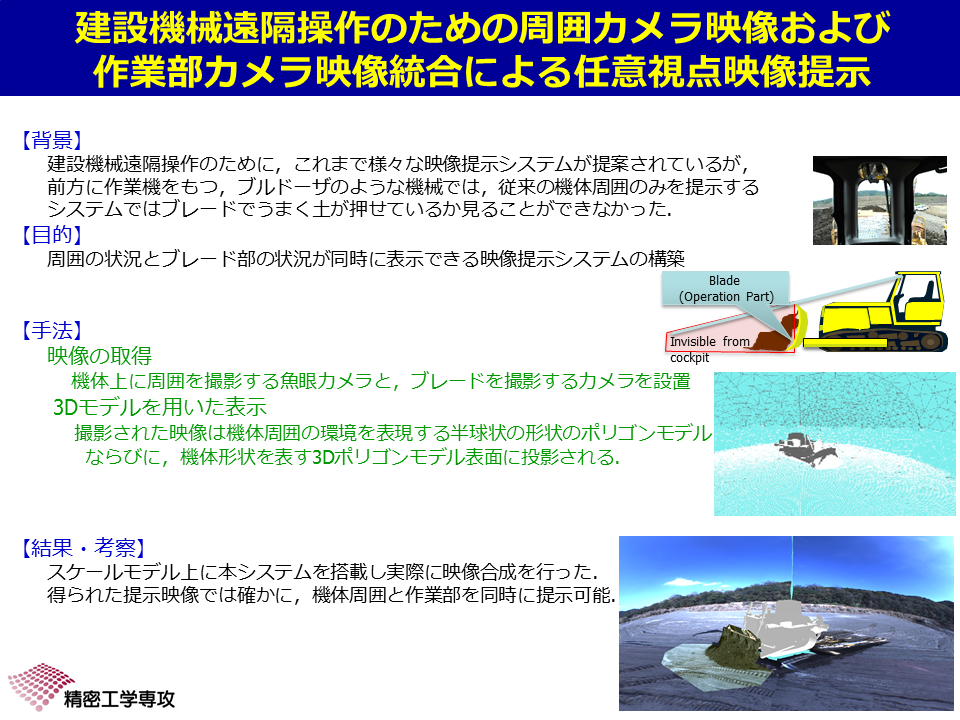
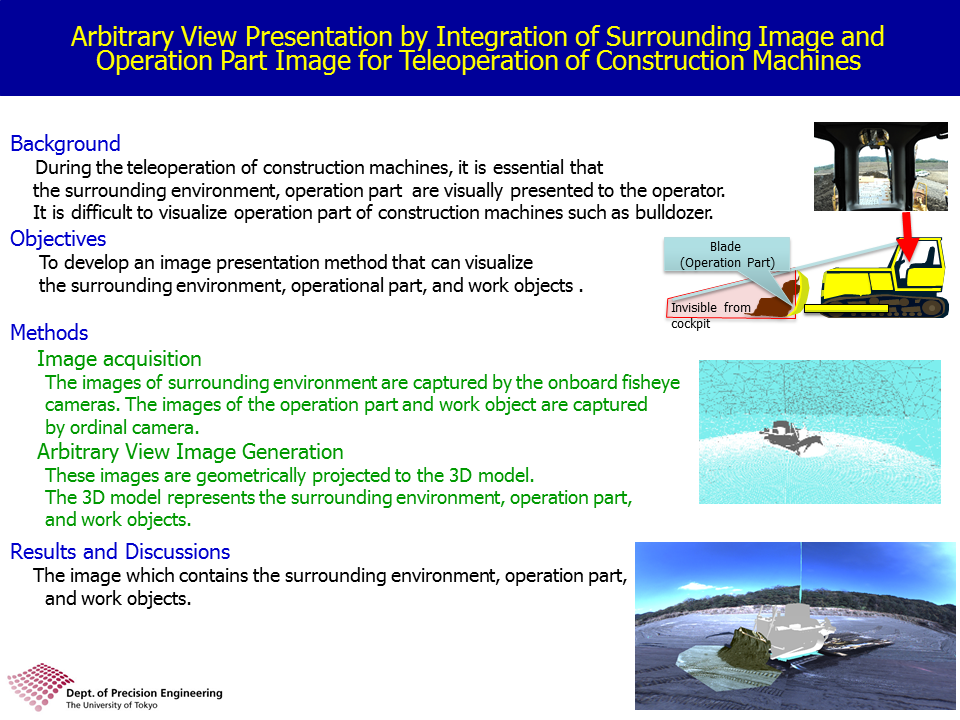
複数の建設機械を用いた遠隔操作による土砂積載作業のための任意視点映像提示 Arbitrary Viewpoint Visualization for Earth Loading Work with Multiple Construction Machines |
就職 |
| 修士 31 |
本間 拓真 Takuma Homma |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2020年4月 ~ 2022年3月 |
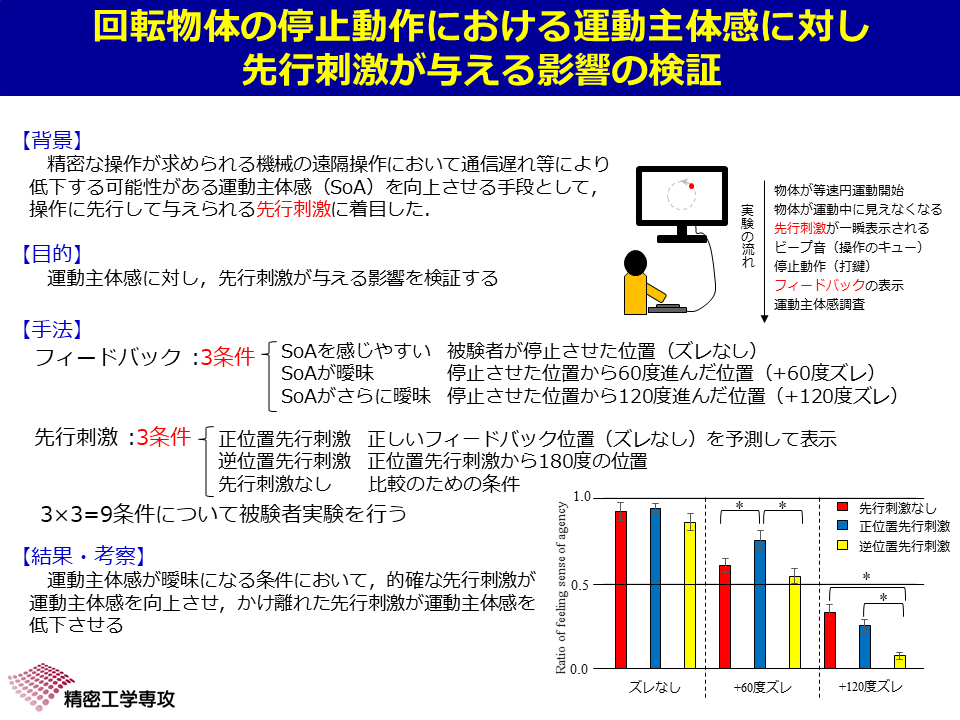
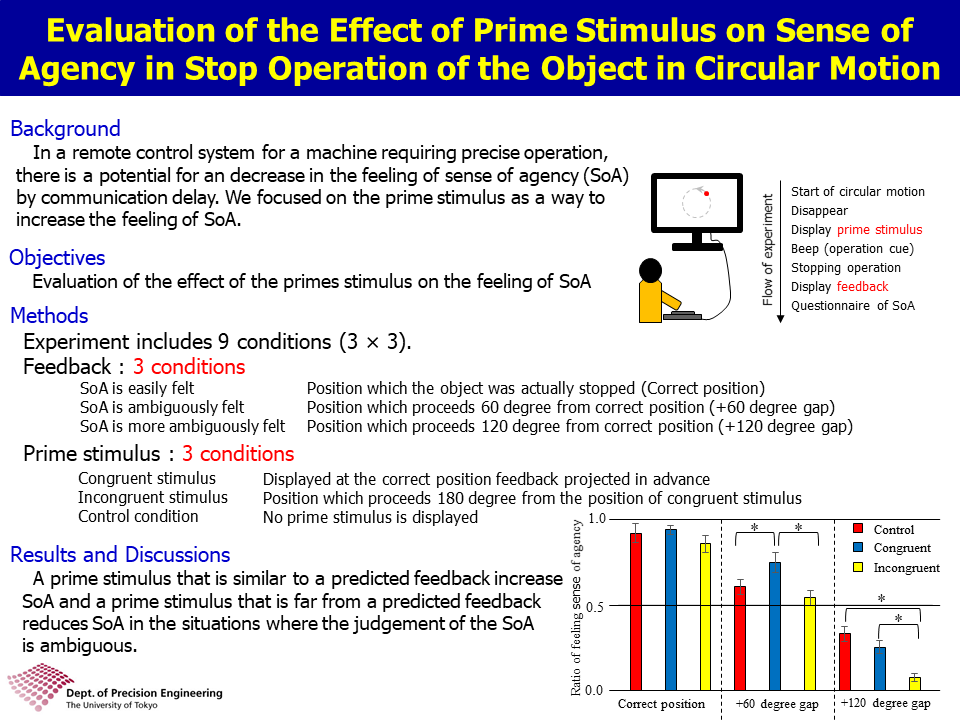
共同制御課題におけるパートナーの意図提示が運動主体感に与える影響 The Influence of Presenting System's Intention on Human Sense of Agency in Human-Machine Joint-Control |
就職 |
| 修士 32 |
山口 恵璃 Eri Yamaguchi |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2020年4月 ~ 2022年3月 |
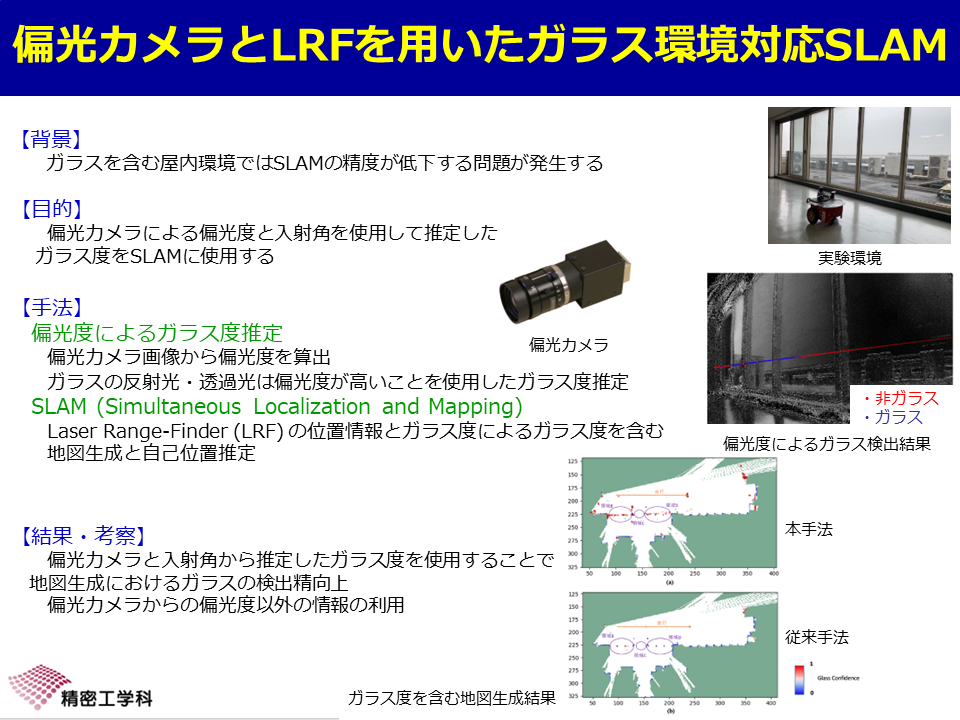
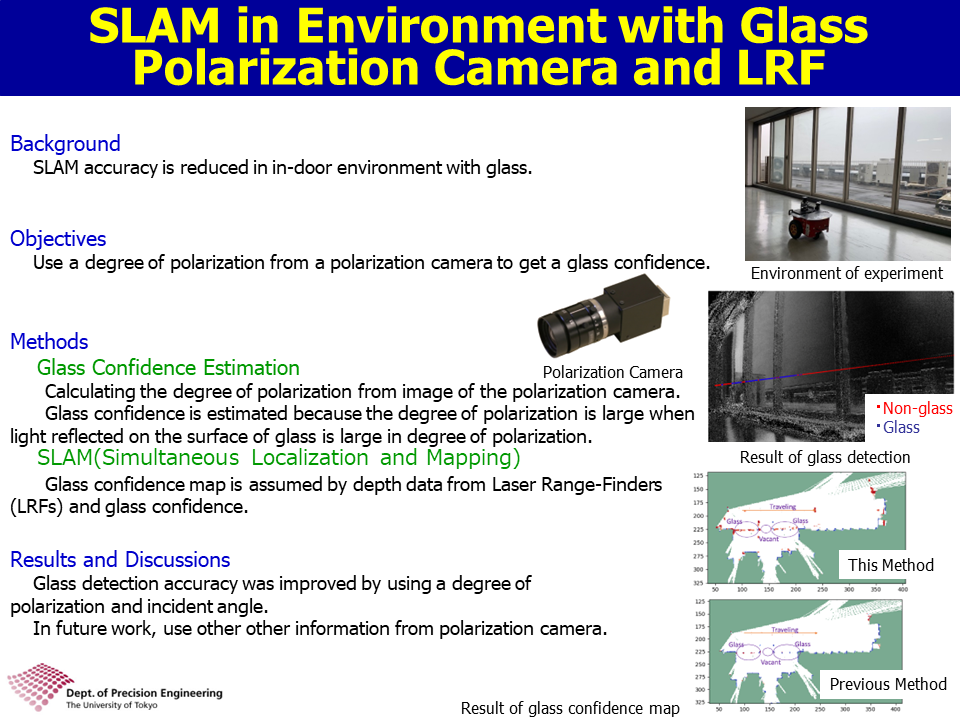
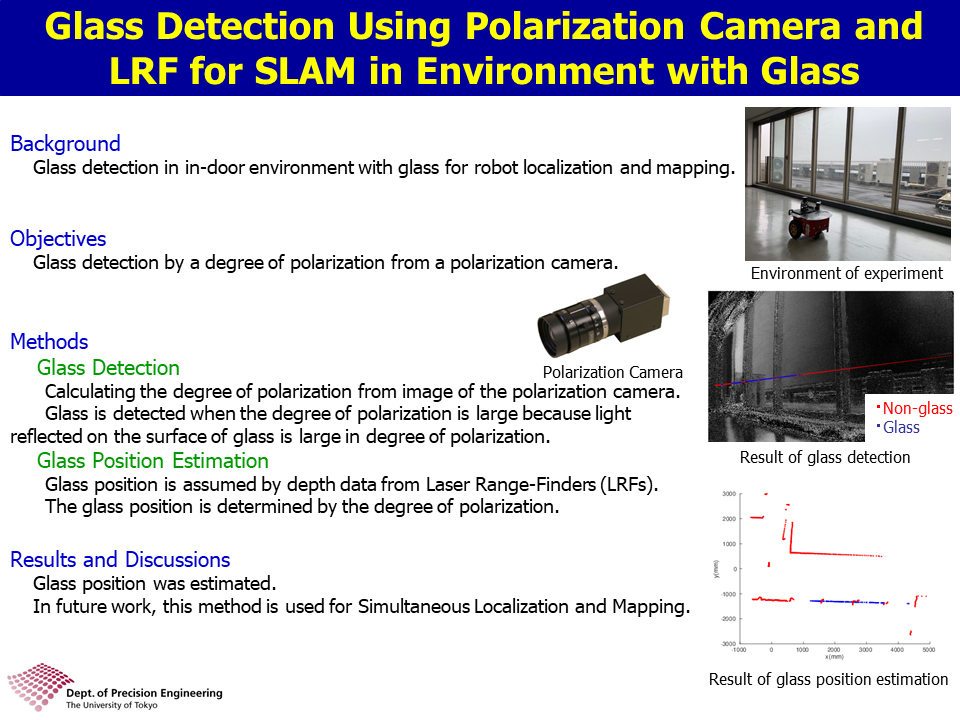
偏光カメラとLRFを用いたガラス環境対応SLAM SLAM in Environment with Glass Using Polarization Camera and LRF |
就職 |
| 修士 33 |
晁 子恒 Ziheng Chao |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2020年4月 ~ 2022年3月 |
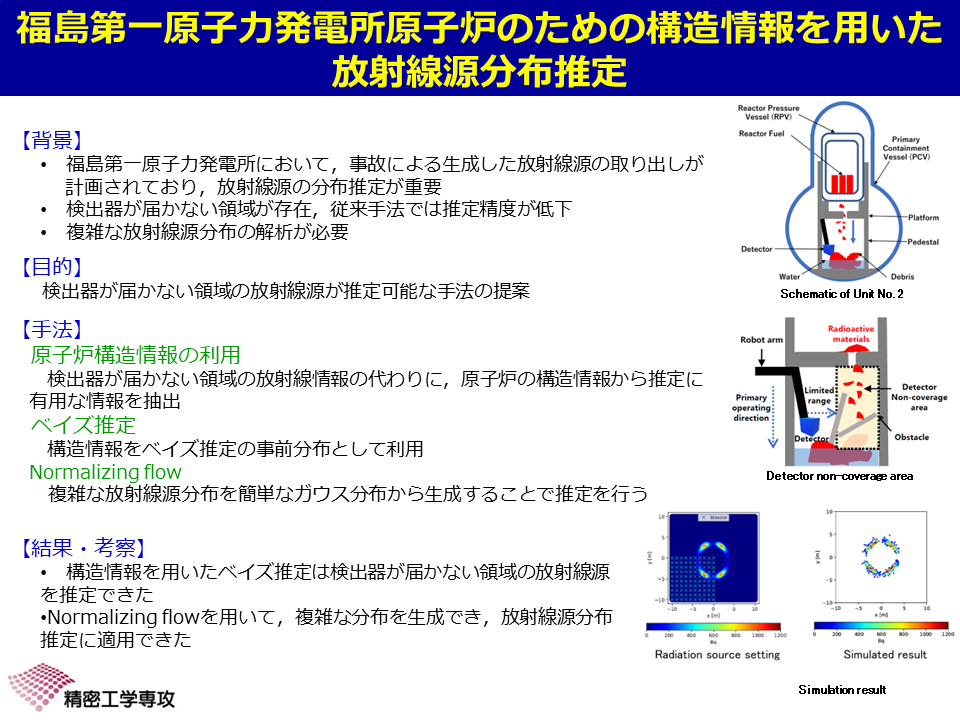
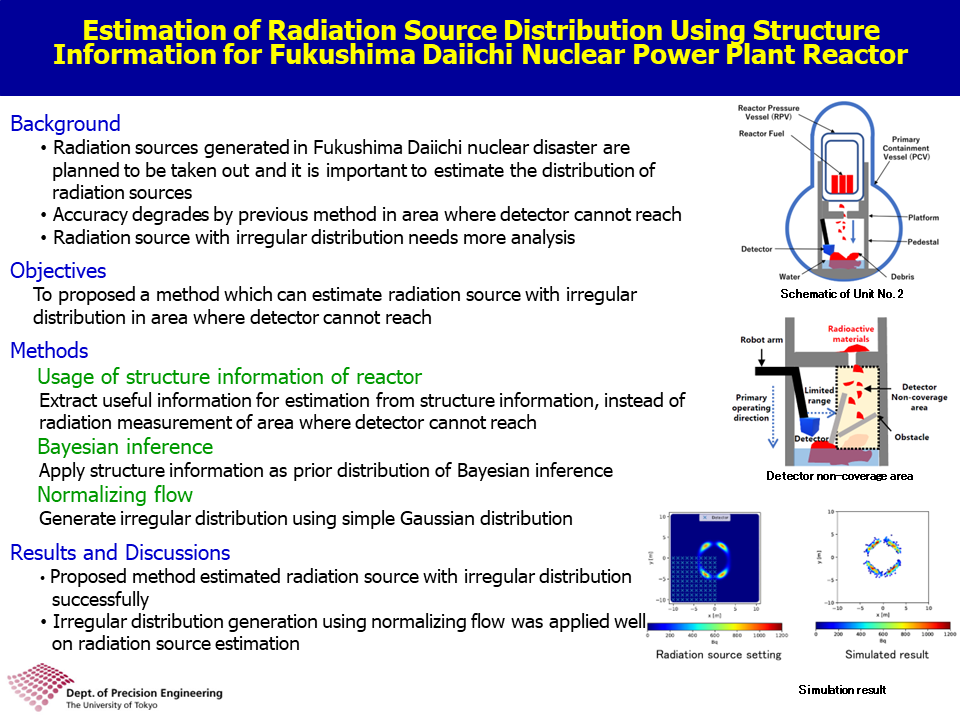
福島第一原子力発電所原子炉のための構造情報を用いた放射線源分布推定 Estimation of Radiation Source Distribution Using Structure Information for Fukushima Daiichi Nuclear Power Plant Reactor |
就職 |
| 学部 19 |
桂 知弘 Tomohiro Katsura |
|
東京大学 工学部 精密工学科 |
山下 淳 | 2021年4月 ~ 2022年3月 |
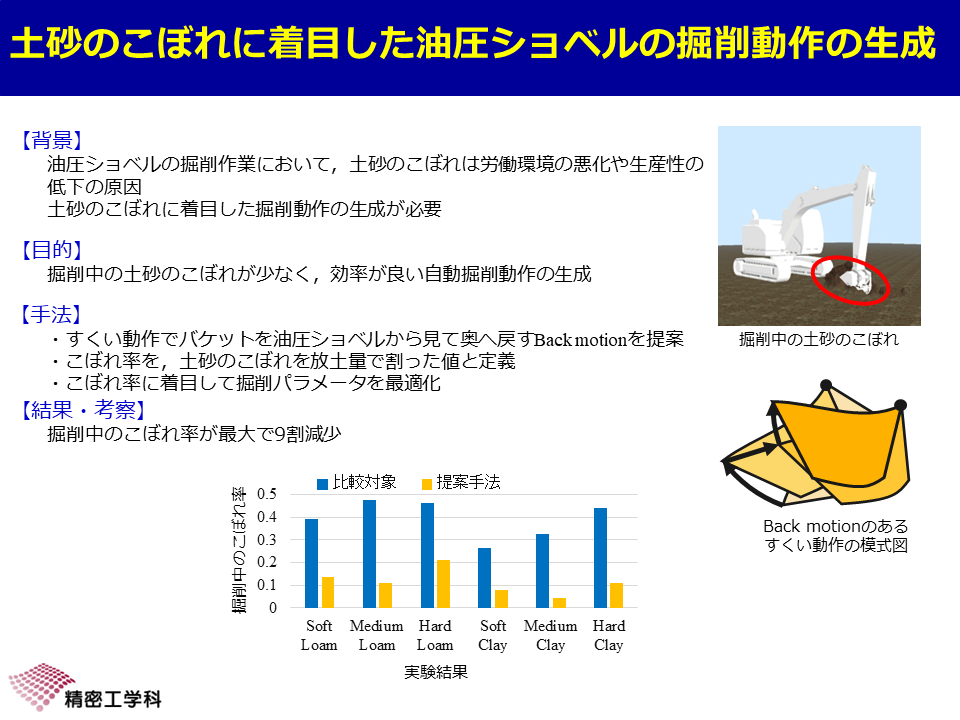
土砂のこぼれに着目した油圧ショベルの掘削軌道の生成 Excavation Trajectory Planning for Excavators Considering Soil Spilling |
修士進学 淺間研 |
| 学部 20 |
成川 文堂 Ayato Narikawa |
|
東京大学 工学部 精密工学科 |
山下 淳 | 2021年4月 ~ 2022年3月 |
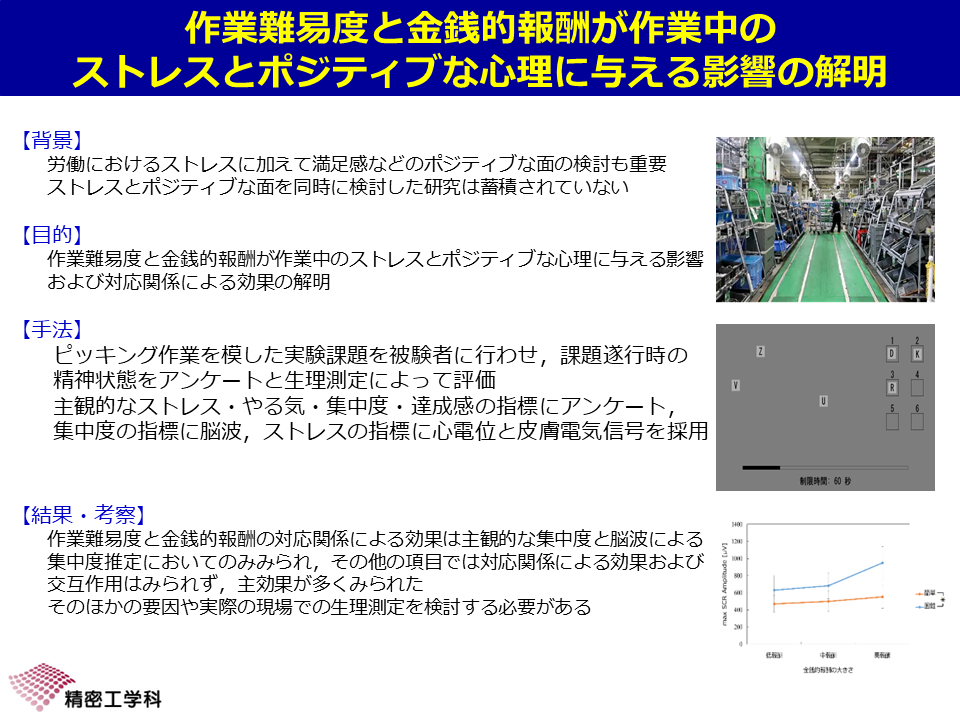
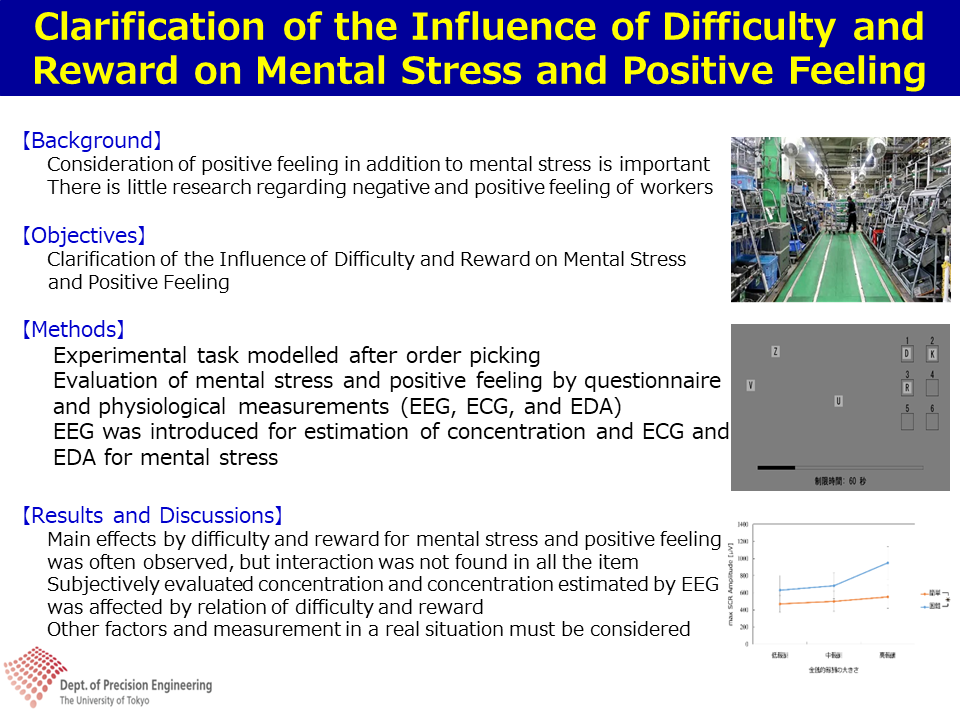
作業難易度と金銭的報酬が作業中のストレスとポジティブな心理に与える影響の解明 Investigation of the Influence on Mental Stress and Positive Feelings from Difficulty and Reward |
修士進学 淺間研 |
| 研 究 生 |
李 鍾学 Jonghak Lee |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2021年10月 ~ 2022年3月 |
- | 博士進学 山下研 |
| 交 換 留 学 生 |
西島 路武 Rom Parnichkun |
 |
Asian Institute of Technology Thailand |
山下 淳 | 2021年10月 ~ 2022年3月 |
MimeticSNAIL: A Deep Reinforcement Learning Framework for Imitation | 博士進学 山下研 |
| 博士 | 陸 小軍 Xiaojun Lu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2016年10月 ~ 2021年9月 (満期修了) |
深層強化学習を用いた人間が共存する環境における社会性を考慮したロボットのナビゲーション Socially Aware Robot Navigation in Human Coexisting Environments Using Deep Reinforcement Learning (2023年3月博士取得) |
大学院研究生 |
| 博士 | 湖上 碩樹 Hiroki Kogami |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2019年4月 ~ 2022年3月 |
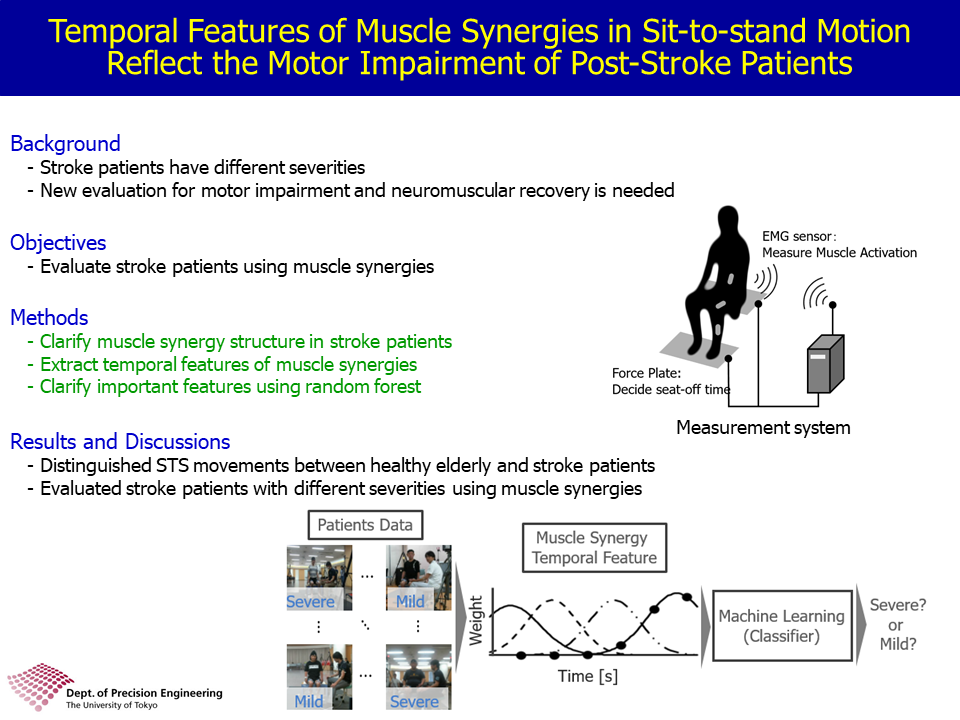
片麻痺患者の起立動作の解析とリハビテーションにおける理学療法士の介入技能の解明 Analysis of Post-Stroke Patient’s Sit-to-stand Motion and Clarification of Physical Therapist’s Skill |
就職 |
| 博士 | 吉田 和憲 Kazunori Yoshida |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
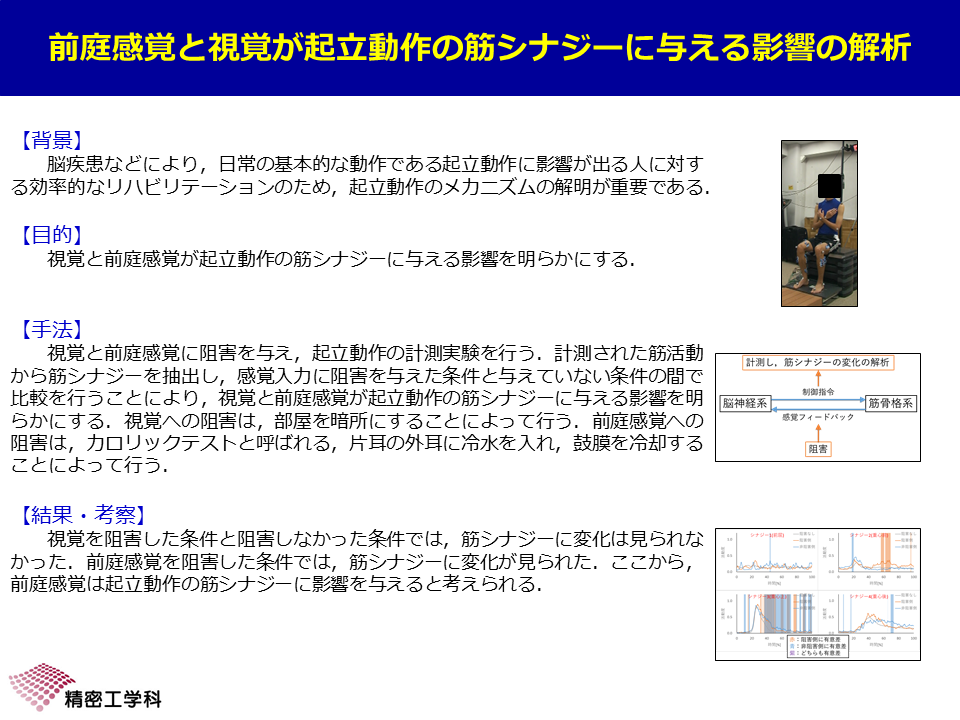
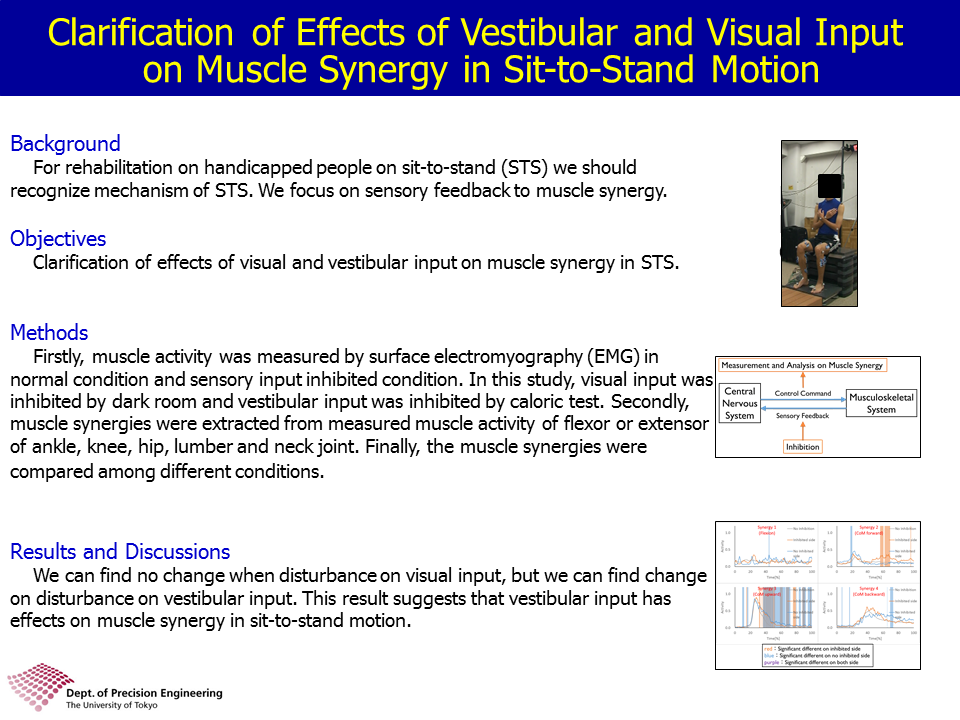
淺間 一 | 2019年4月 ~ 2022年3月 |
起立動作における視覚および前庭・体性感覚の寄与の解析 | 就職 |
| 博士 | Stefano Massaroli |  |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2019年10月 ~ 2022年3月 |
動的システムによる暗黙的学習:モデル,数値手法,および応用 Implicit Learning with Dynamical Systems: Models, Numerical Methods and Applications |
就職 |
| 修士 | 王 若曦 Ruoxi Wang |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2019年9月 ~ 2021年9月 |
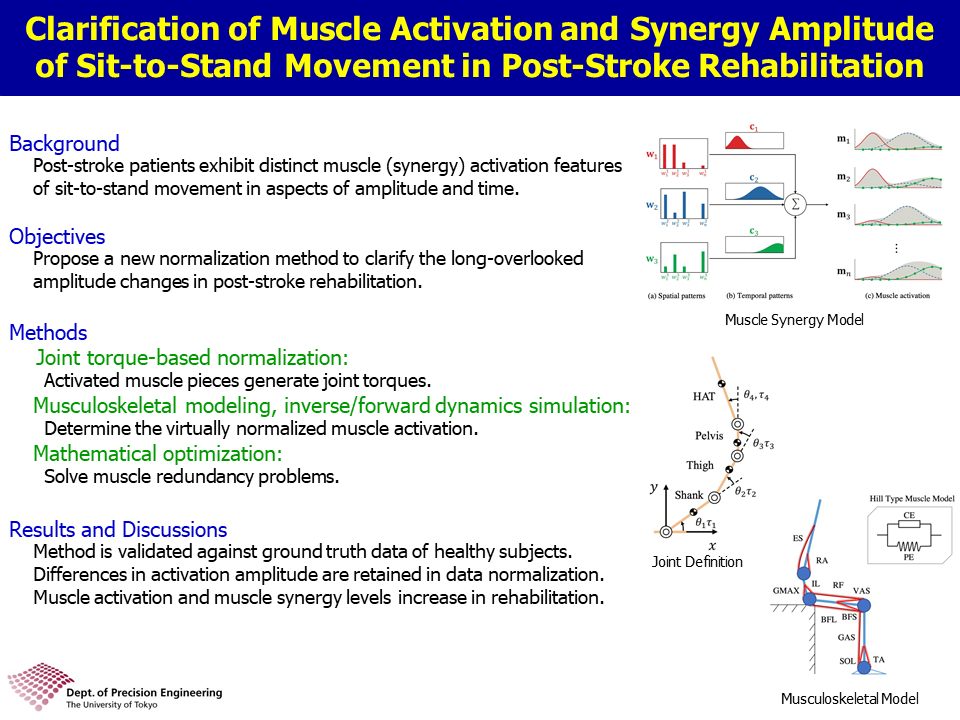
筋骨格モデルを用いた脳損傷後のリハビリテーションにおける筋シナジーの変化の解明 Changes in Muscle Synergy During Post-Stroke Rehabilitation Clarified by Musculoskeletal Modeling |
博士進学 Boston University |
| 修士 | 伊賀上 卓也 Takuya Igaue |
|
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2020年4月 ~ 2022年3月 |
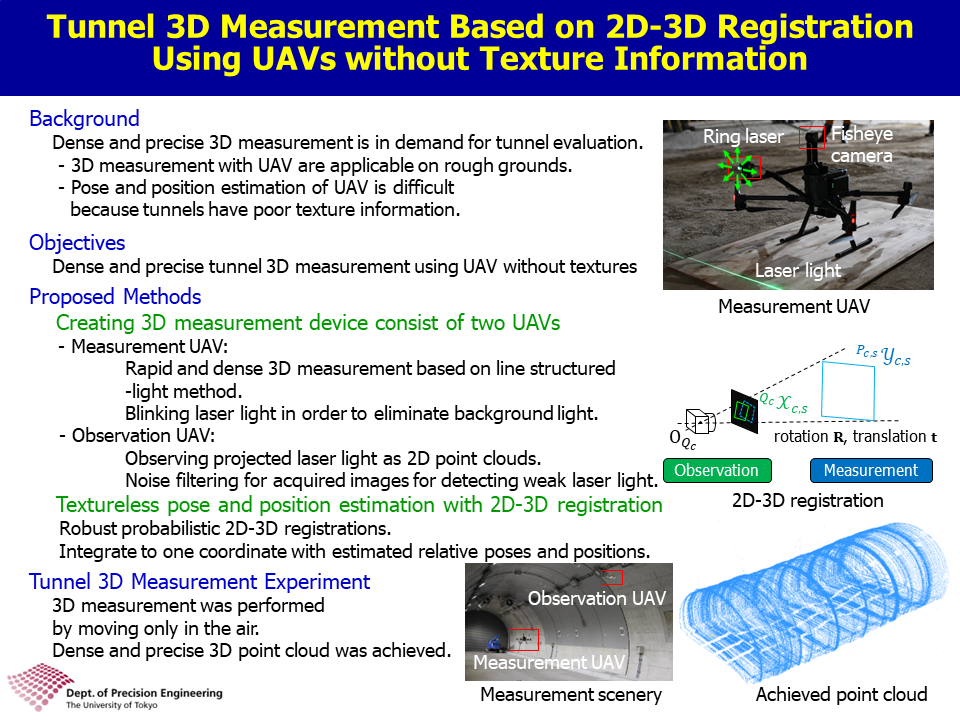
リングレーザ照射光の2D-3Dマッチングに基づく光切断法によるトンネル内部の3次元計測 Line Structured Light-Based Tunnel 3D Measurement with 2D-3D Point Cloud Registration on Projected Light of Ring Laser |
博士進学 山下研 |
| 修士 | 後田 啓太朗 Keitaro Ushiroda |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2020年4月 ~ 2022年3月 |
打音検査におけるマルチモーダル情報を活用したドメインギャップに頑健な異常識別 Multi-Modal Robust Classification Using Domain Adaptation for Automated Defect Detection Based on the Hammering Test |
就職 |
| 修士 | 陽 東旭 Dongxu Yang |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2020年4月 ~ 2022年3月 |
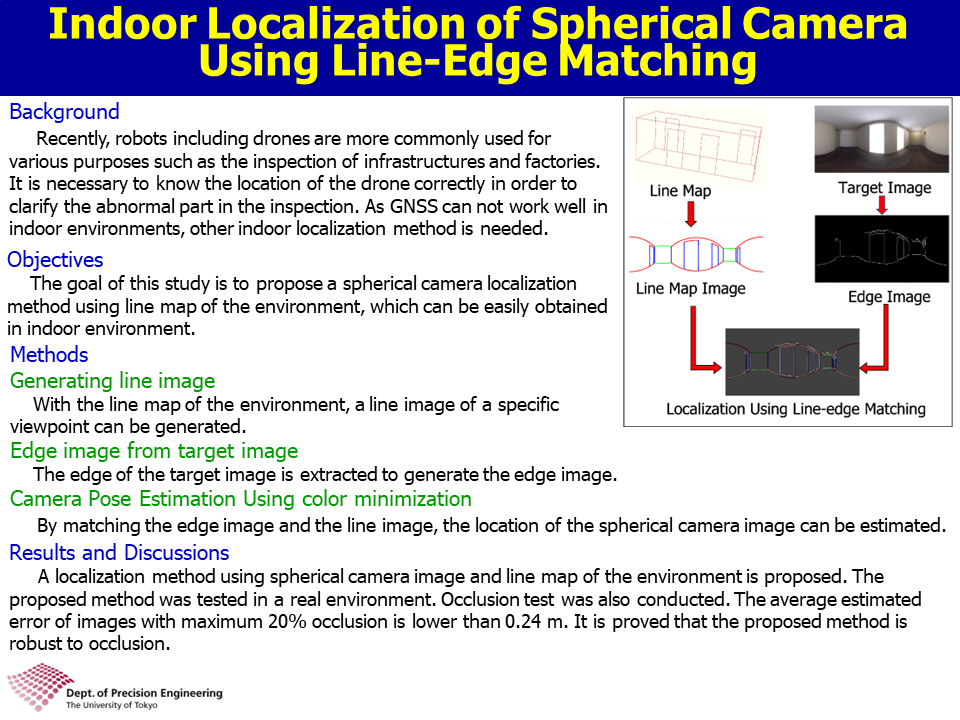
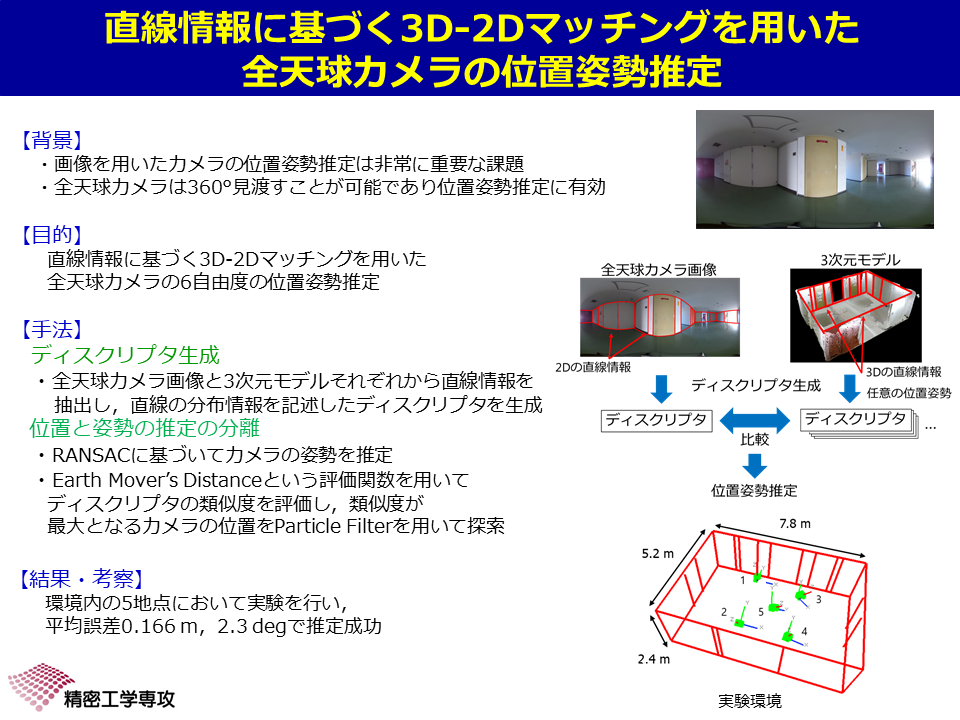
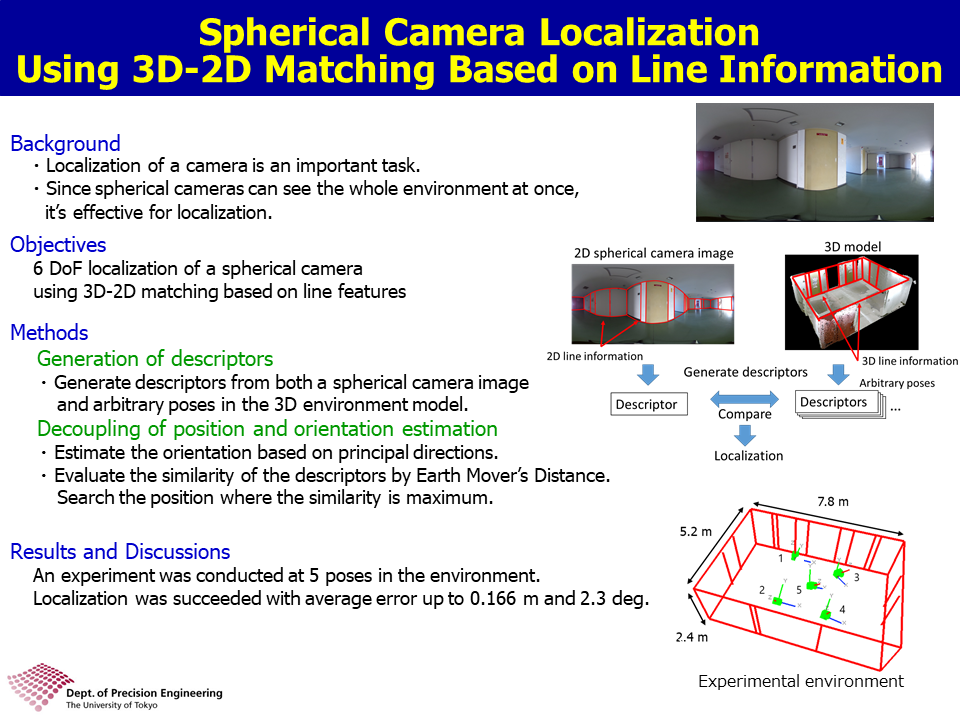
線分特徴とエッジのマッチングによる屋内環境における全天球カメラの位置推定 Indoor Localization of Spherical Camera Using Line-Edge Matching |
就職 |
| 学部 | 上野 将輝 Masaki Ueno |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2021年4月 ~ 2022年3月 |
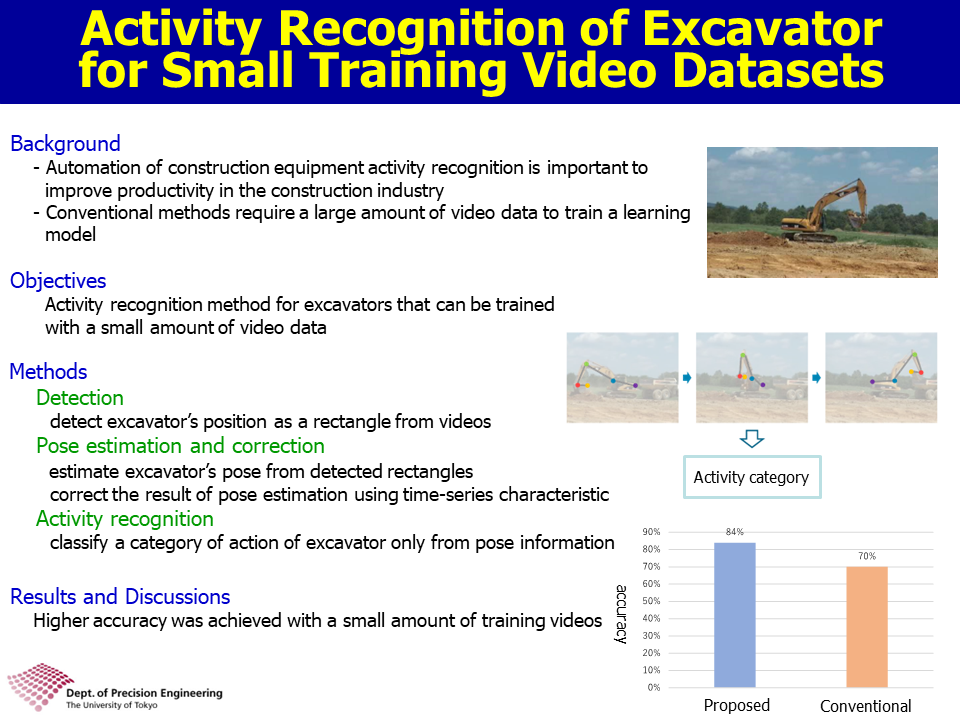
少量の動画データのための油圧ショベルの動作認識 Activity Recognition of Excavator for Small Training Video Datasets |
修士進学 金秀炫研 |
| 学部 | 興津 亨祐 Kyosuke Okitsu |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2021年4月 ~ 2022年3月 |
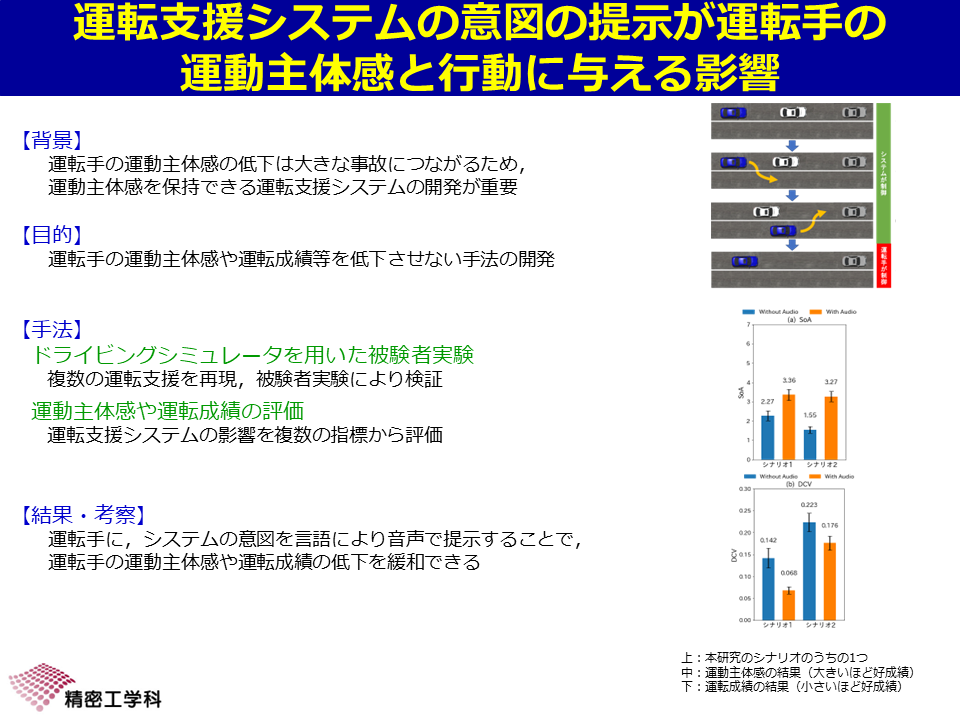
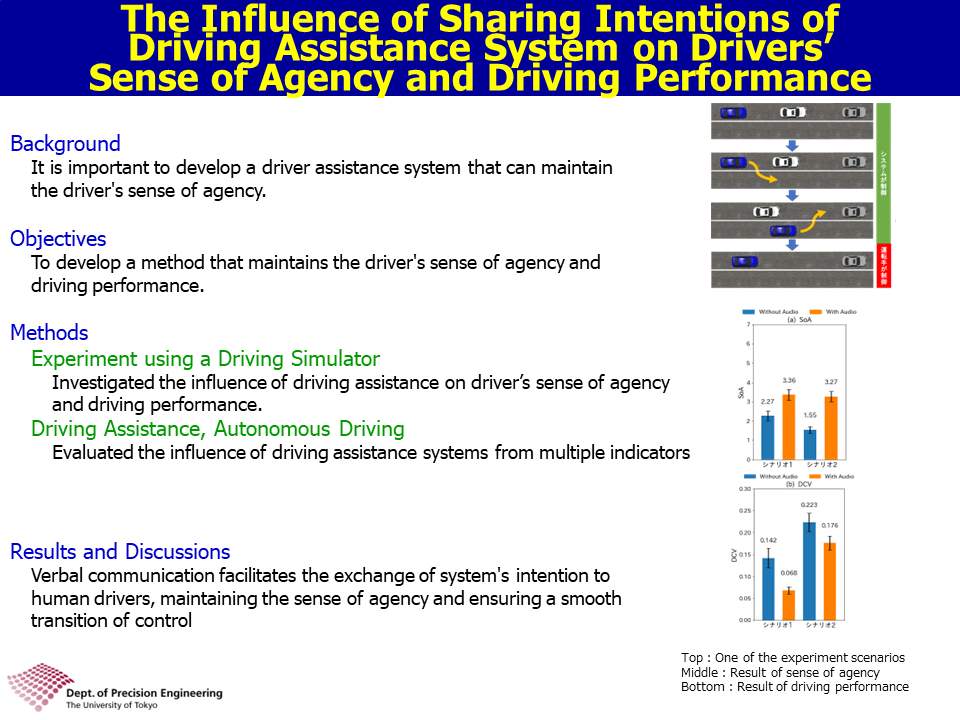
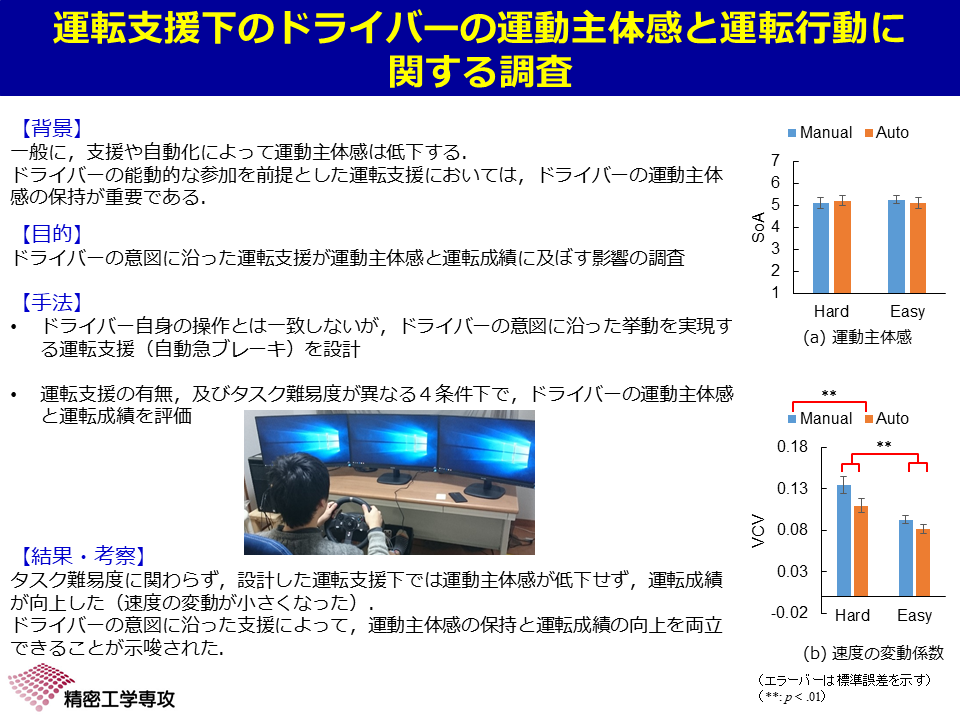
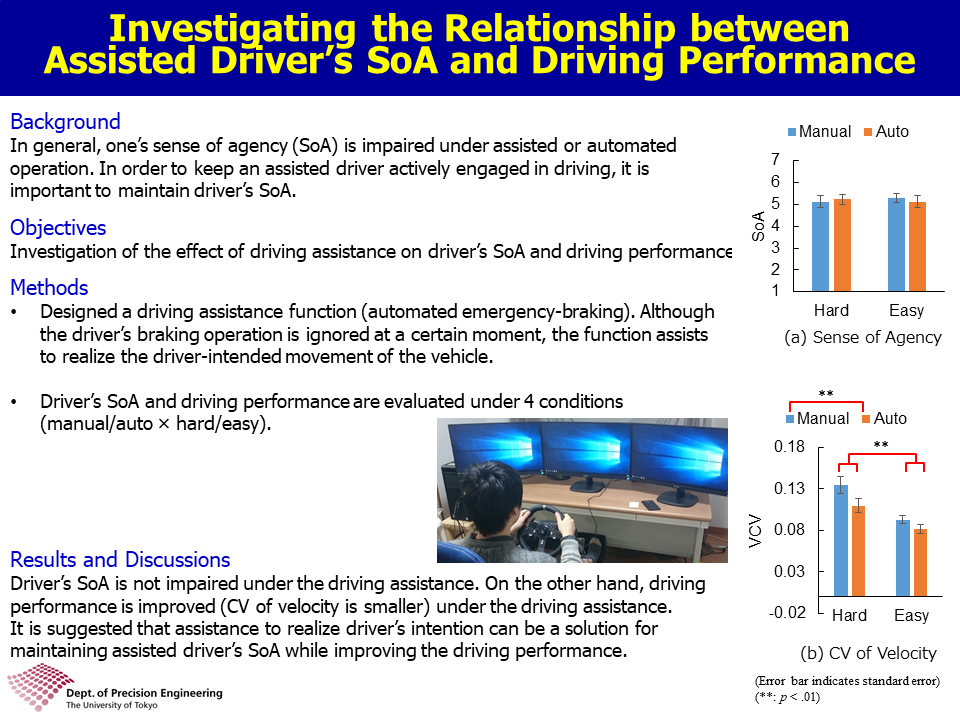
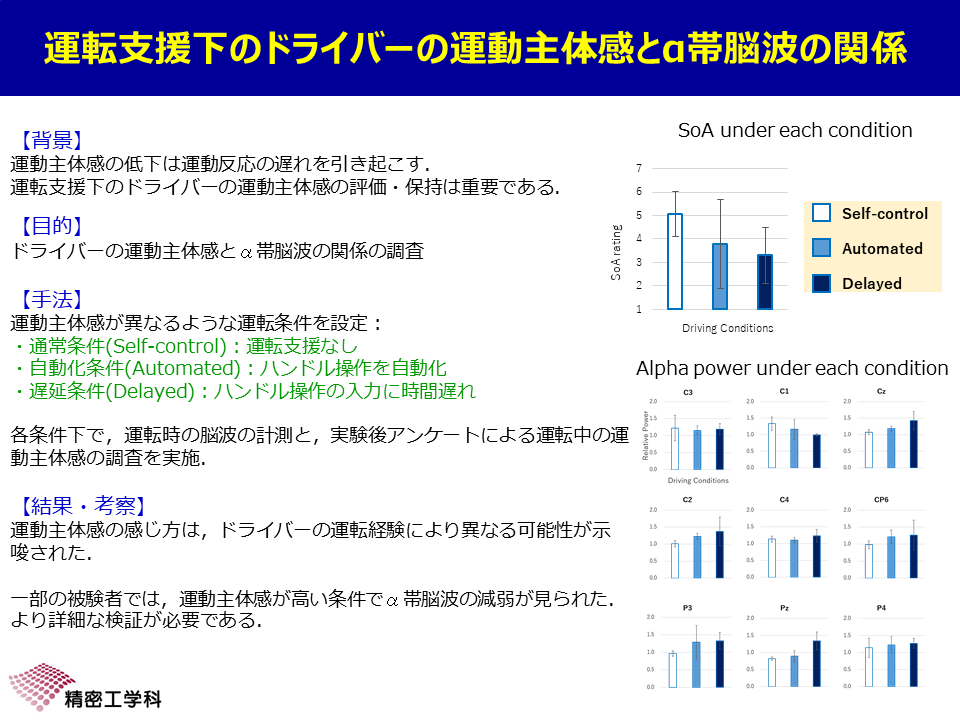
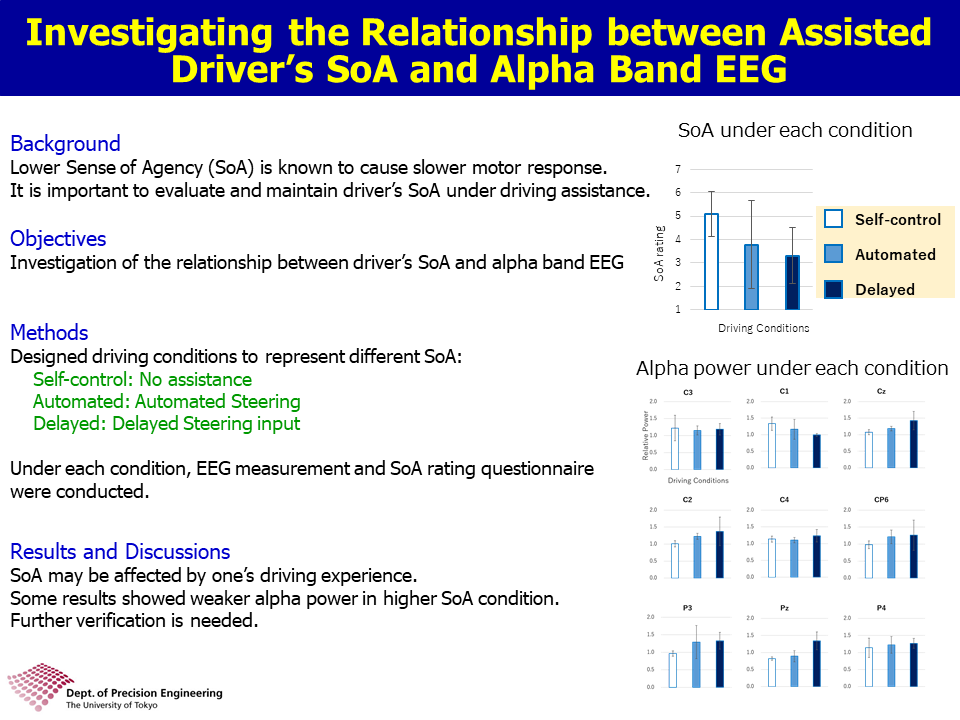
運転支援システムの意図の提示が運転手の運動主体感と行動に与える影響 The Influence of Sharing Intentions of Driving Assistance System on Drivers’ Sense of Agency and Driving Performance |
修士進学 佐久間研 |
| 学部 | 日浦 愛子 Aiko Hiura |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2021年4月 ~ 2022年3月 |
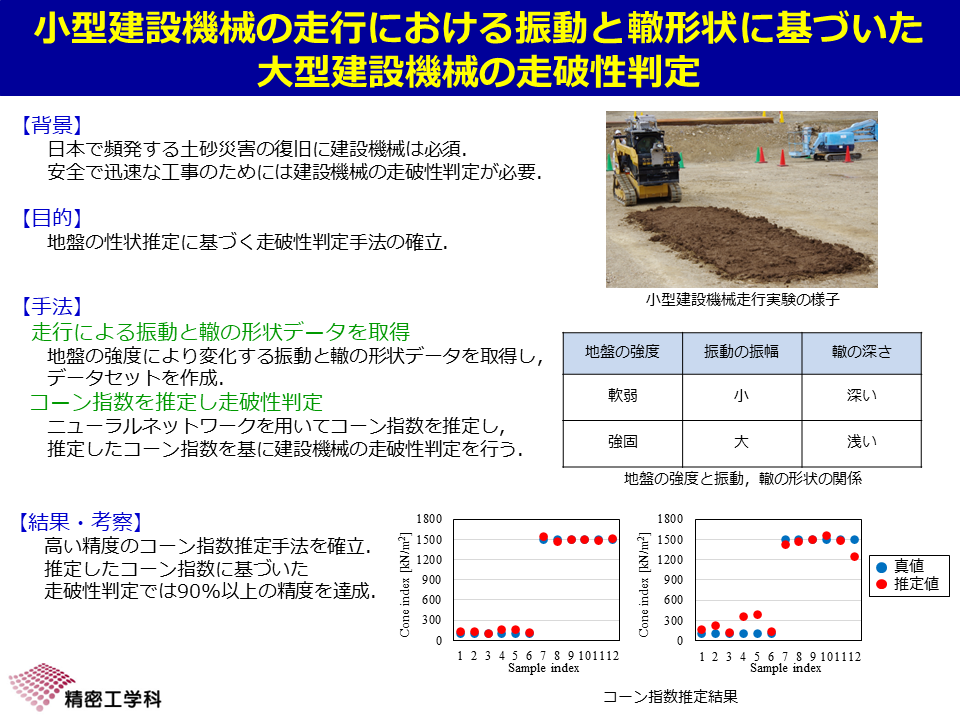
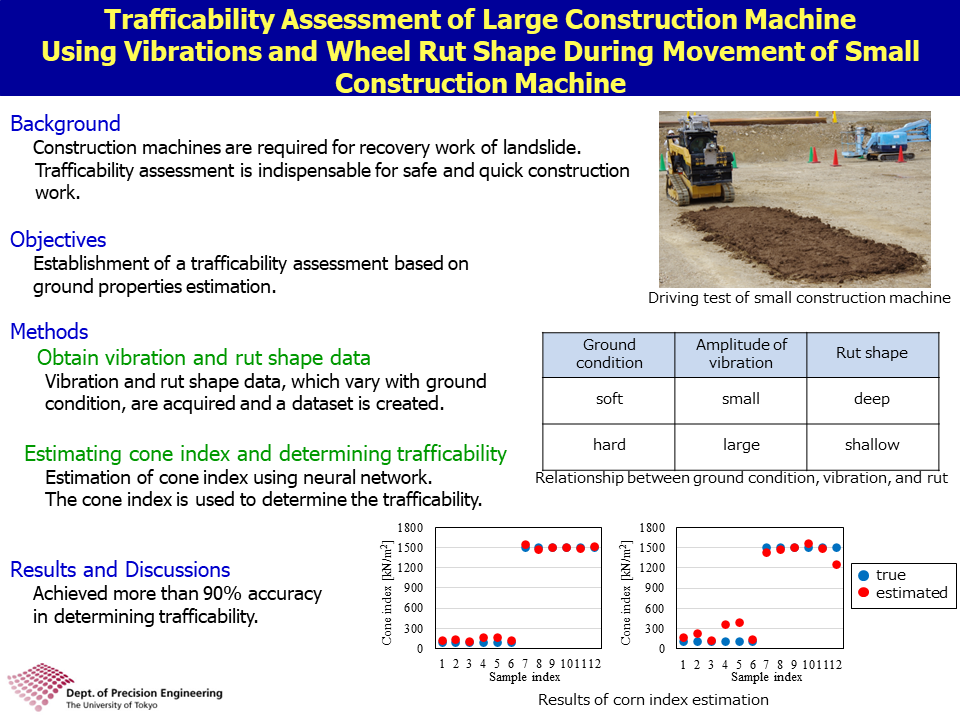
小型建設機械の走行における振動と轍形状に基づいた大型建設機械の走破性判定 Trafficability Assessment of Large Construction Machine Using Vibrations and Wheel Rut Shape During Movement of Small Construction Machine |
修士進学 新野研 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 修士 23 |
包 潤秋 Runqiu Bao |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2018年9月 ~ 2020年9月 |
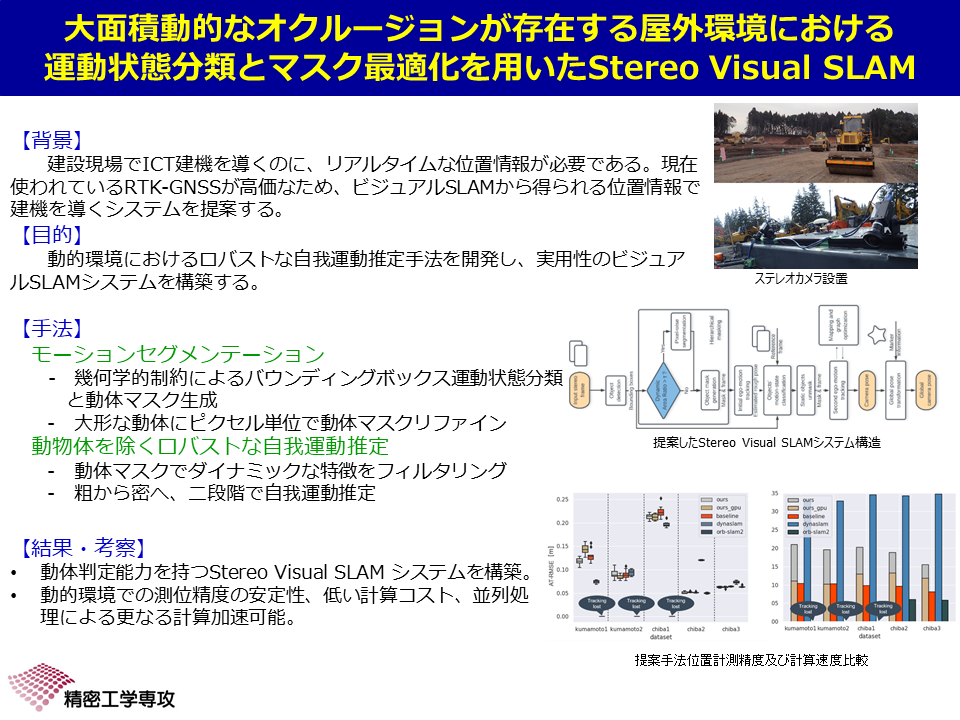
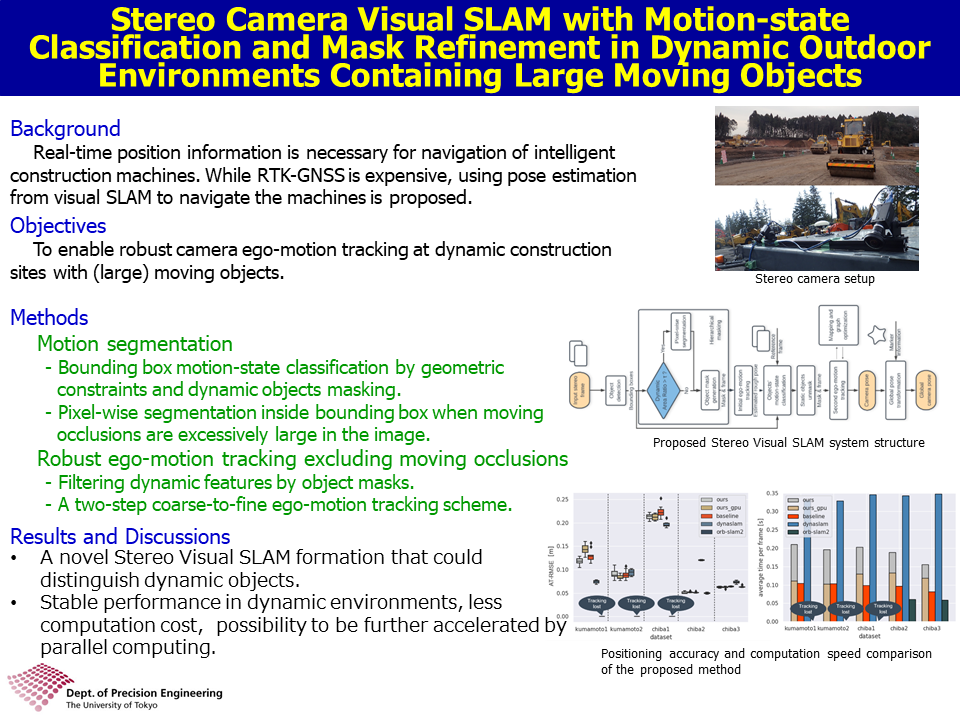
非GNSS/動的環境におけるステレオVisual SLAMを用いた建設機械のグローバル位置姿勢推定 Global Pose Estimation of Construction Vehicle in GNSS-denied Dynamic Environments Using Stereo Visual SLAM |
博士進学 山下研 |
| 修士 24 |
殷 琬琪 Wanqi Yin |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2018年9月 ~ 2020年9月 |
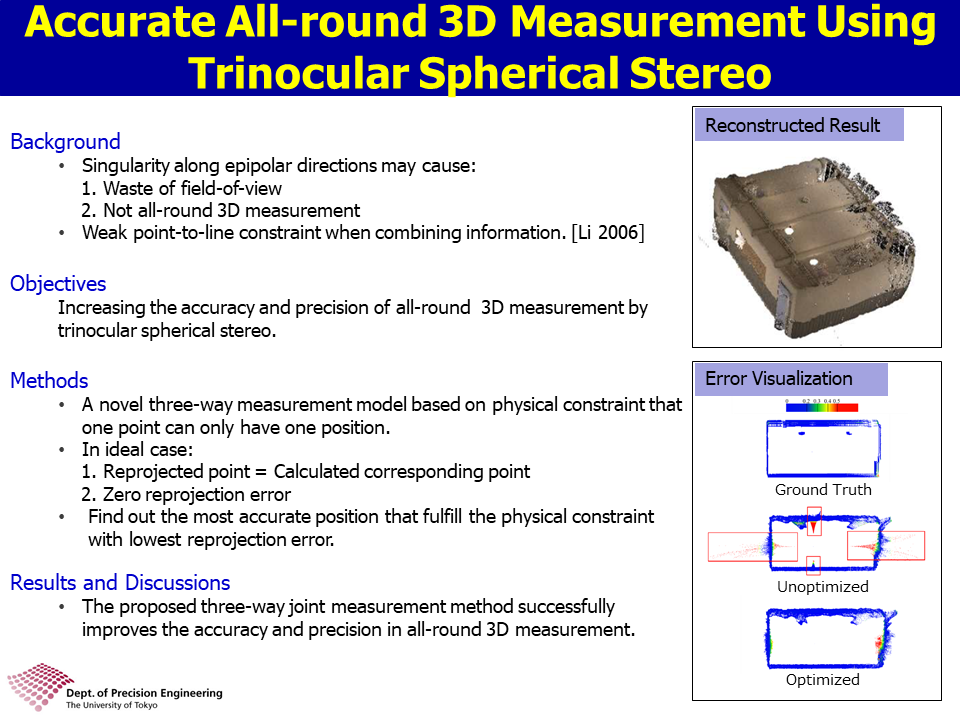
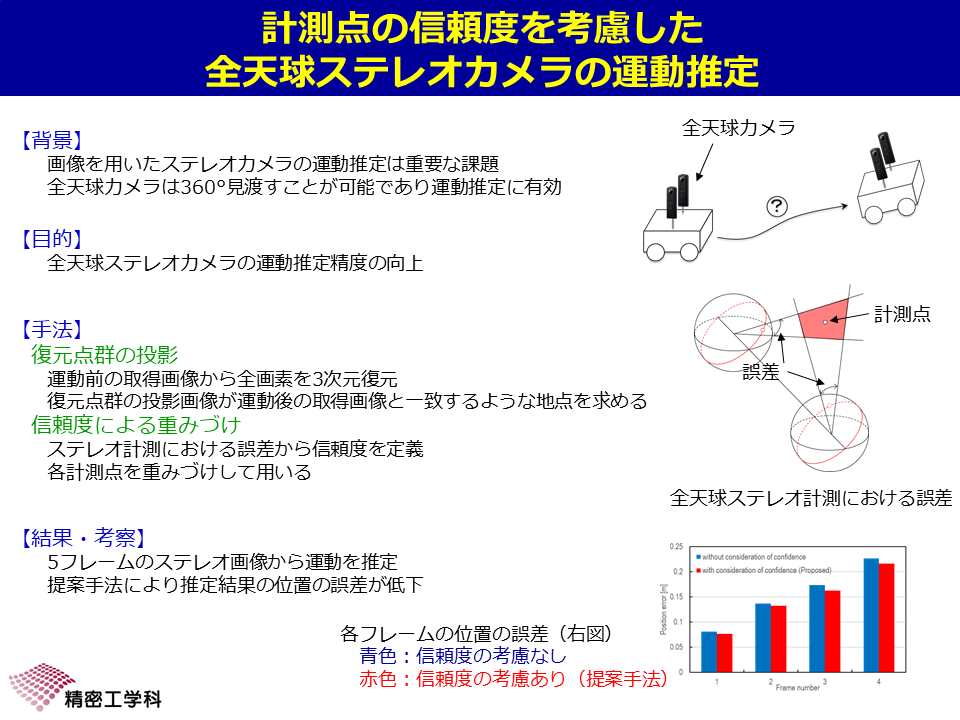
3眼全天球ステレオカメラによる高精度な全方位3次元計測 Accurate All-round 3D Measurement via Trinocular Spherical Stereo |
博士進学 山下研 |
| 修士 25 |
内田 大介 Daisuke Uchida |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2019年4月 ~ 2021年3月 |
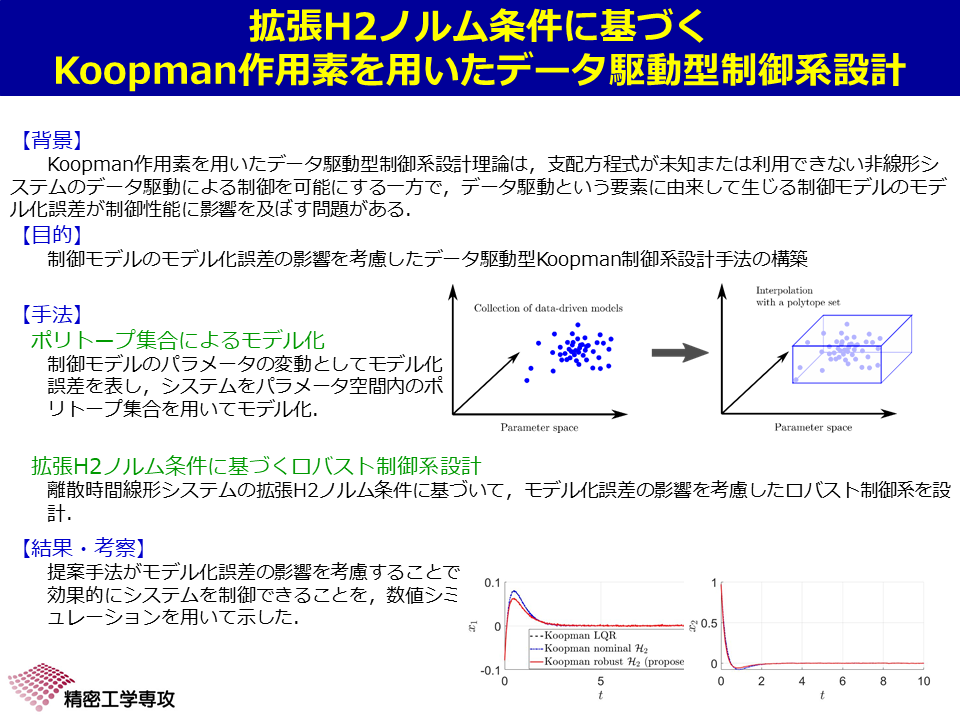
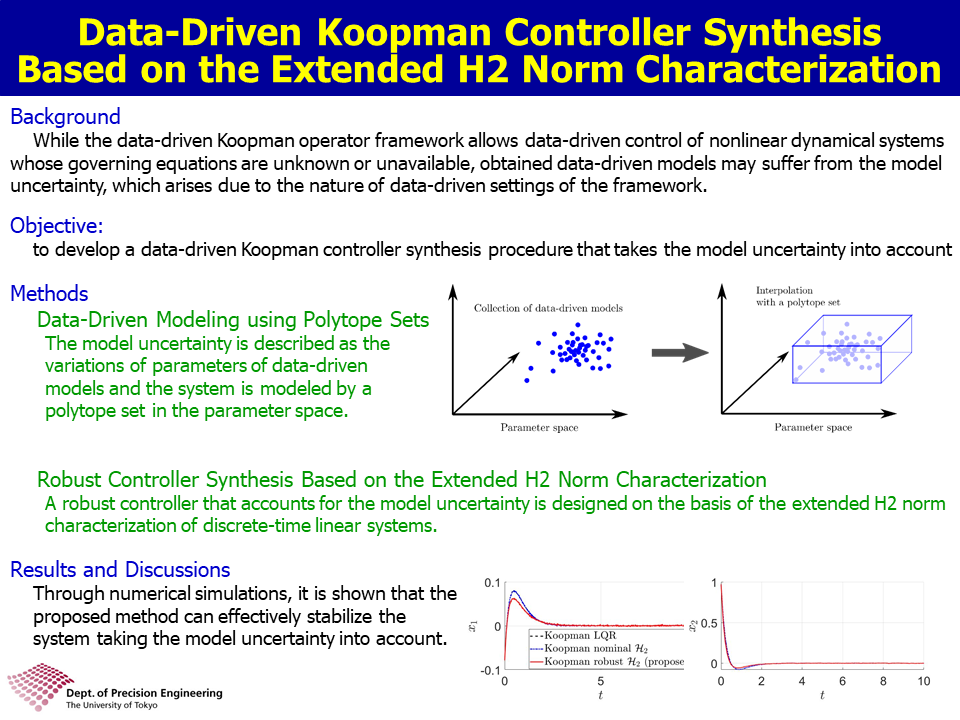
拡張H2ノルム条件に基づくクープマン作用素を用いたデータ駆動型制御系設計 Data-Driven Koopman Controller Synthesis Based on the Extended H2 Norm Condition |
博士進学 University of Michigan |
| 修士 26 |
杉本 瑞生 Mizuki Sugimoto |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2019年4月 ~ 2021年3月 |
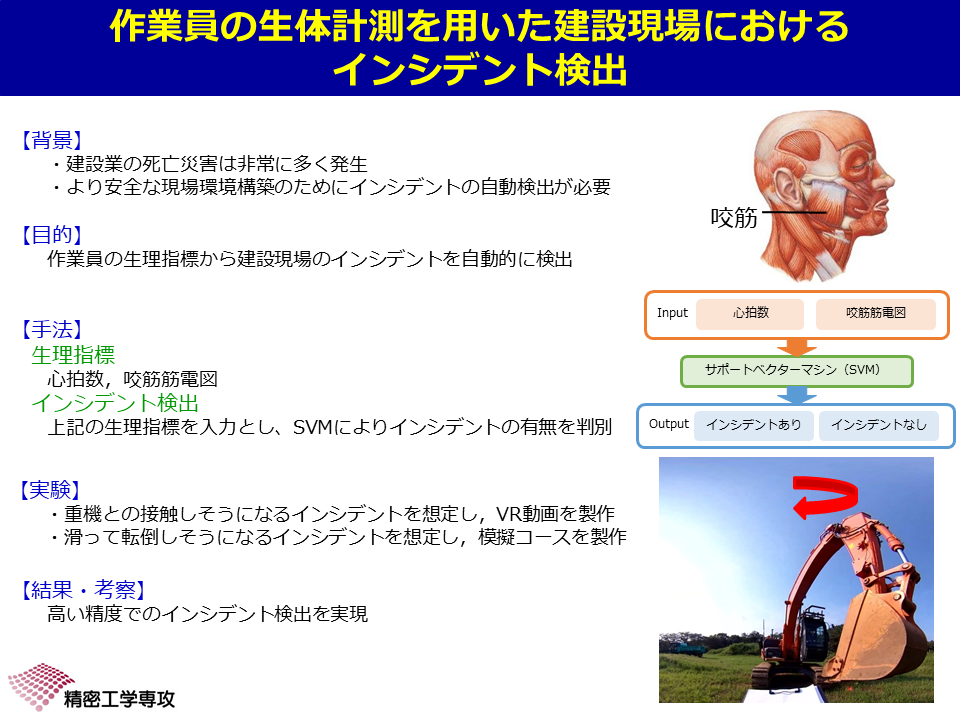
作業員の生体計測を用いた建設現場におけるインシデント検出 Incident Detection for Construction Sites Using Biological Measurement of Workers |
就職 |
| 修士 27 |
沈 鎭赫 Jinhyeok Sim |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2019年4月 ~ 2021年3月 |
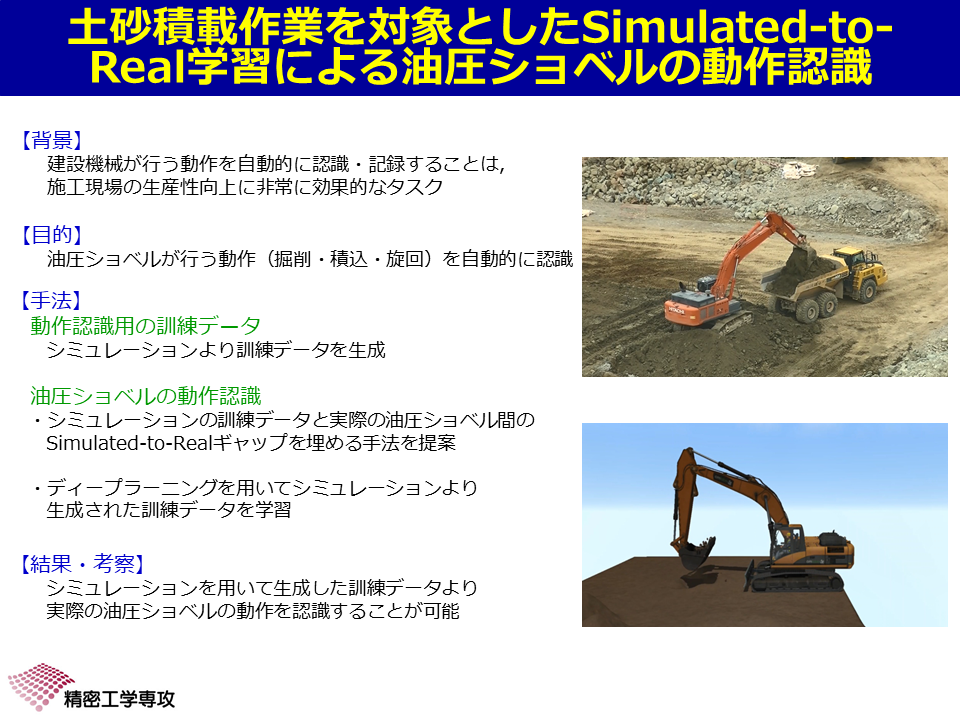
土砂積載作業を対象としたSimulated-to-Real学習による油圧ショベルの動作認識 Action Recognition of Excavator by Simulated-to-Real Learning for Loading Dump Truck |
就職 |
| 学部 17 |
片山 諒 Ryo Katayama |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2020年4月 ~ 2021年3月 |
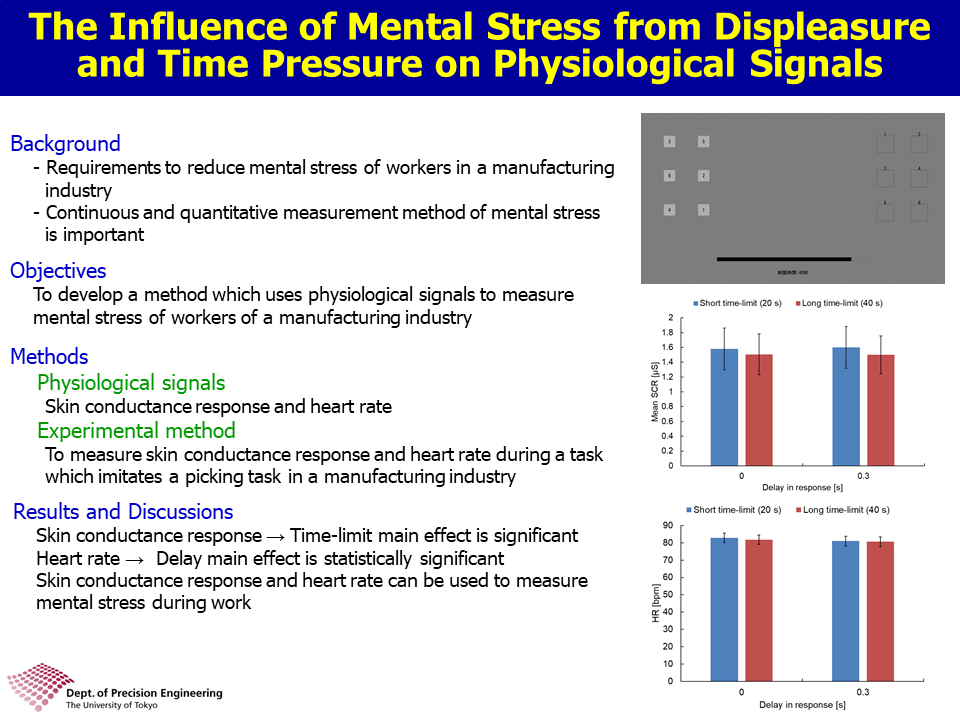
時間的制約と不快感による精神的ストレスが生理指標に与える影響 The Influence of Mental Stress from Displeasure and Time Pressure on Physiological Signals |
修士進学 川勝研 |
| 学部 18 |
藤野 裕太郎 Yutaro Fujino |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2020年4月 ~ 2021年3月 |
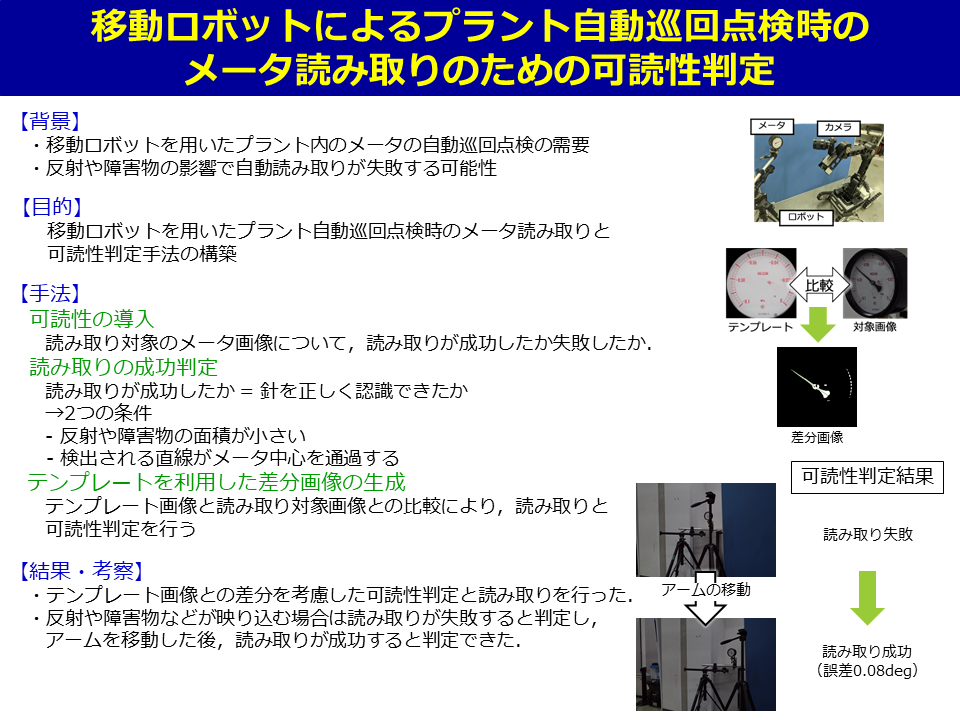
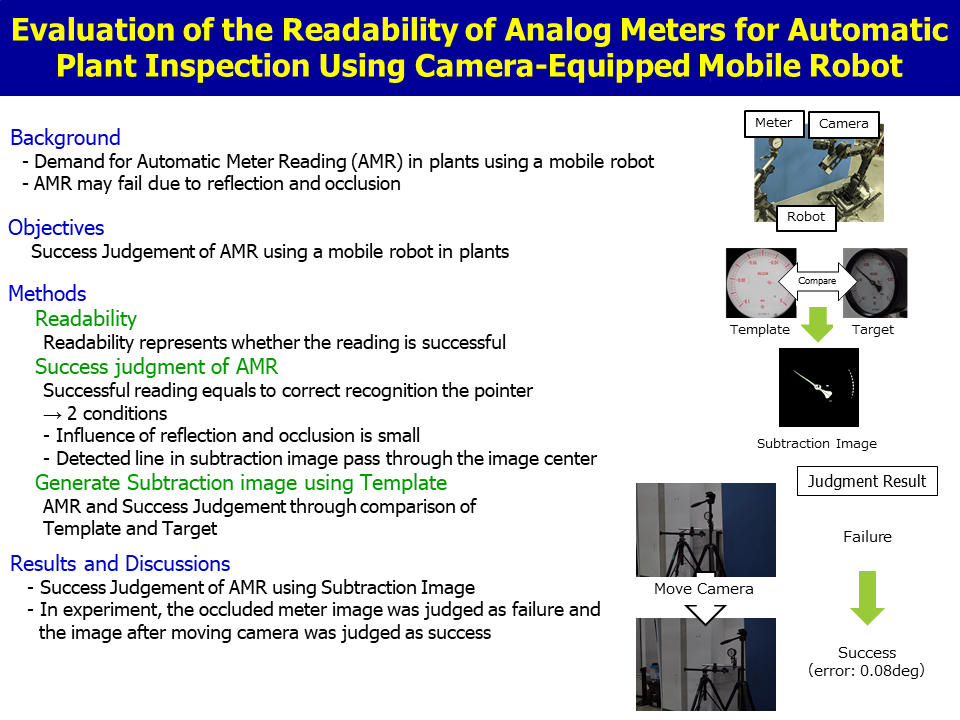
カメラを搭載した移動ロボットによるプラント自動点検時のメータ読み取りのための可読性判定 Evaluation of the Readability of Analog Meters for Automatic Plant Inspection Using a Camera-Equipped Mobile Robot |
修士進学 山下研 |
| 交 換 留 学 生 |
Jules Sebastien Regis Lesaulnier |
École des Mines de Nantes France |
山下 淳 | 2020年4月 ~ 2020年8月 |
(オンライン受講) | - | |
| 修士 | 勝間 慎弥 Shinya Katsuma |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2019年4月 ~ 2021年3月 |
土の状態及び地下障害物を考慮した油圧ショベルによる自動掘削 Autonomous Excavation for Hydraulic Excavators Considering Soil Characteristics and Underground Obstacles |
就職 |
| 修士 | 岸本 卓也 Takuya Kishimoto |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2019年4月 ~ 2021年3月 |
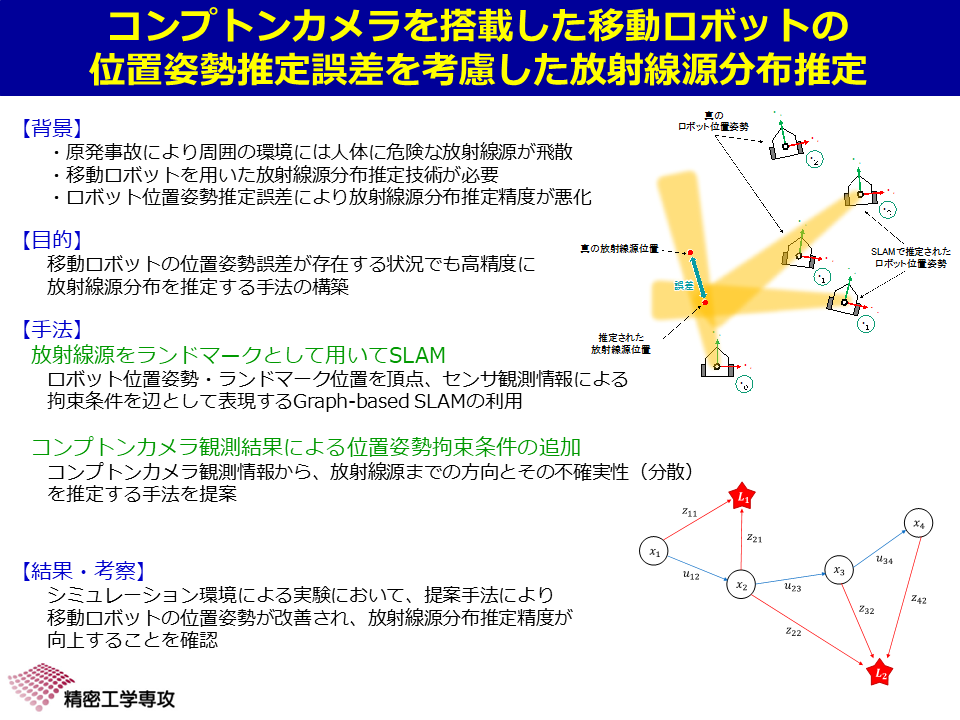
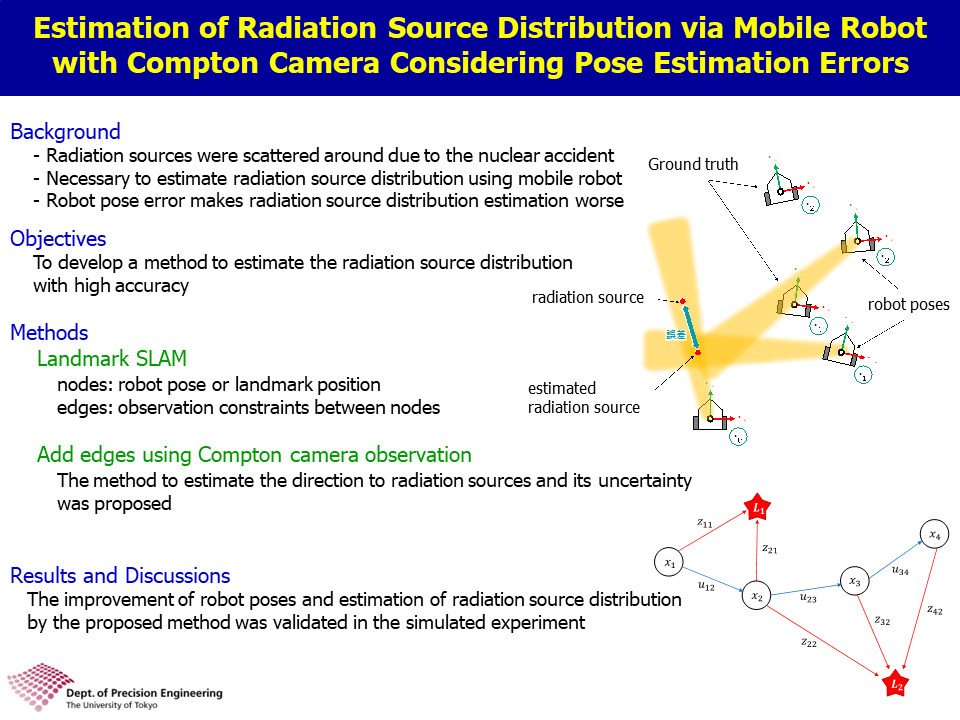
全方向コンプトンカメラを搭載した移動ロボットによる環境中の放射線源計測における計測点の生成 Generation of Measuring Point of Radiation Sources Using a Mobile Robot Equipped with a All-Around View Gamma-ray Compton Camera |
就職 |
| 修士 | 徐 浩 Hao Xu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2019年4月 ~ 2021年3月 |
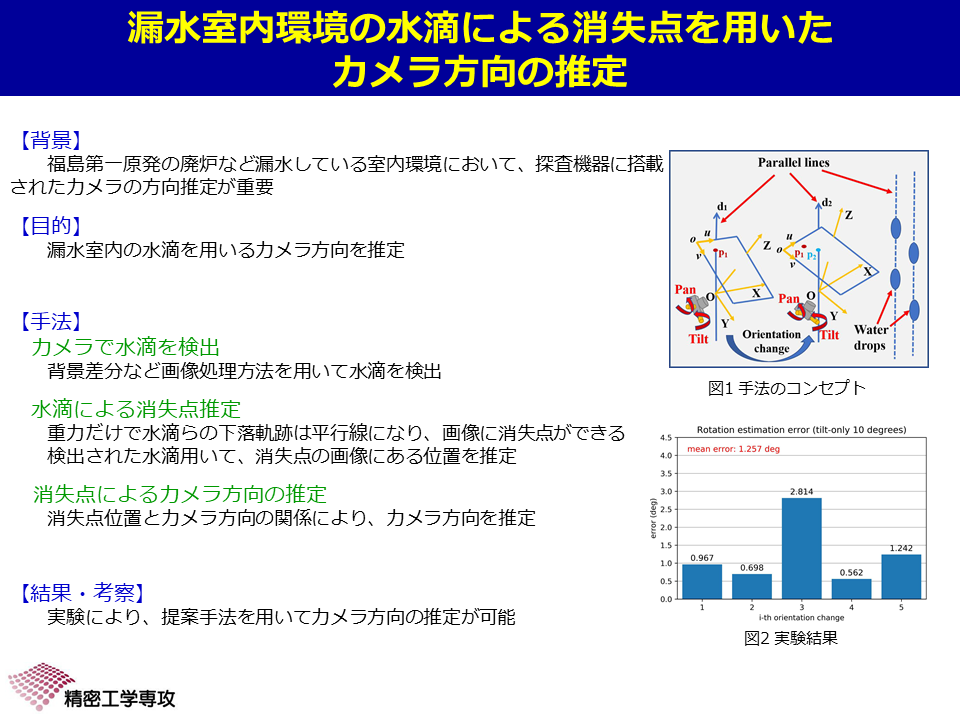
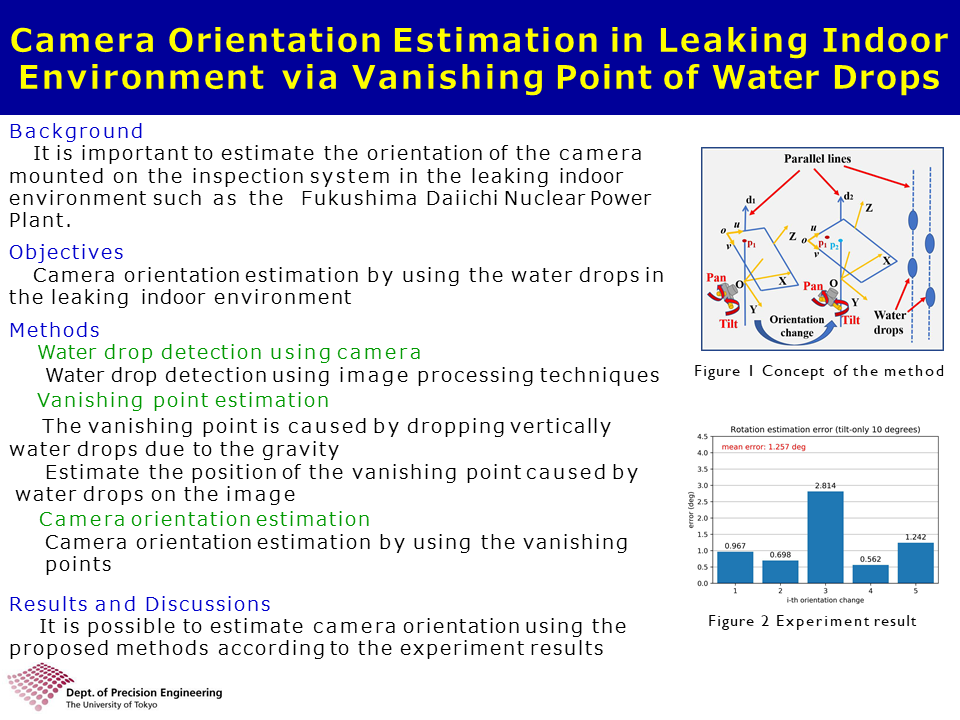
福島原子力発電所のためのカメラを用いた冷却水漏れ位置推定 Leaking Position Estimation of Cooling Water Using Camera for the Fukushima Nuclear Power Plant |
就職 |
| 学部 | 杉山 大地 Daichi Sugiyama |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2019年4月 ~ 2021年3月 |
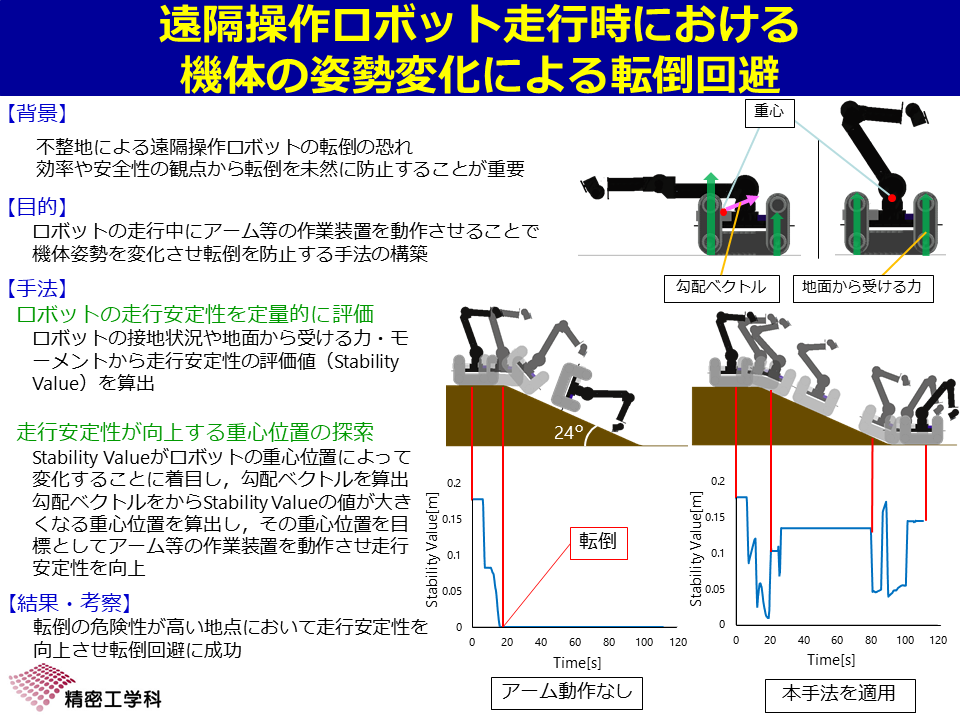
3次元不整地環境におけるアームの姿勢制御による移動ロボットの転倒回避 Tumble Avoidance of Mobile Robot on 3D Rough Terrain by Posture Control of Mounted Arm |
就職 |
| 学部 | 尾近 祐太 Yuta Okon |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2020年4月 ~ 2021年3月 |
自己音声認識が音源の位置推定に与える影響の検証 The Effect of Self-voice Recognition on the Estimation of Sound Source Position |
就職 |
| 学部 | 高宮 秀徳 Hidenori Takamiya |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2020年4月 ~ 2021年3月 |
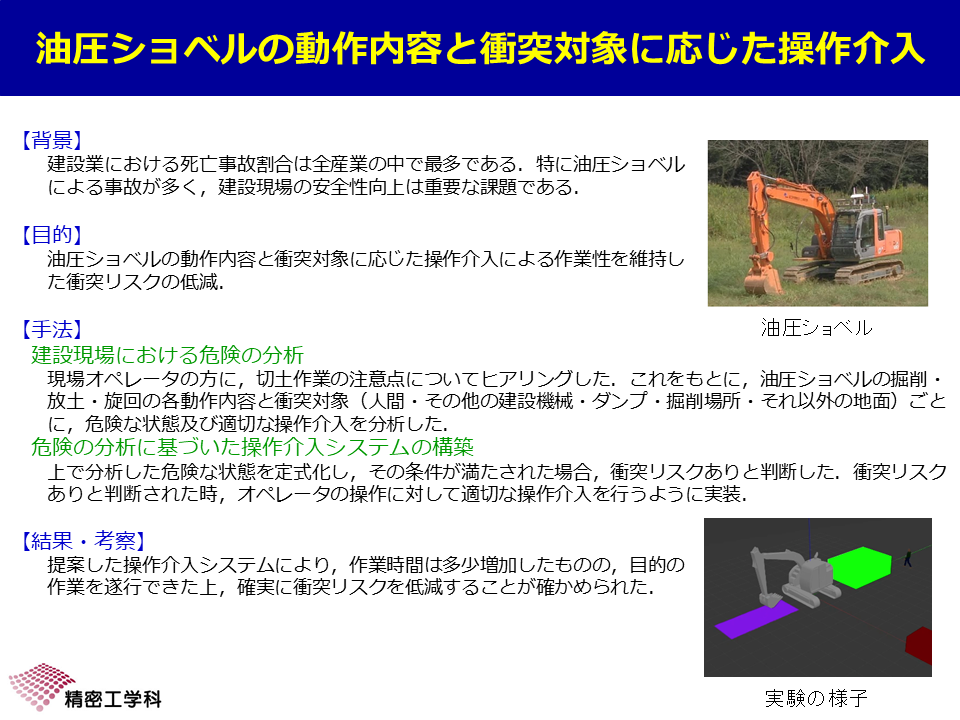
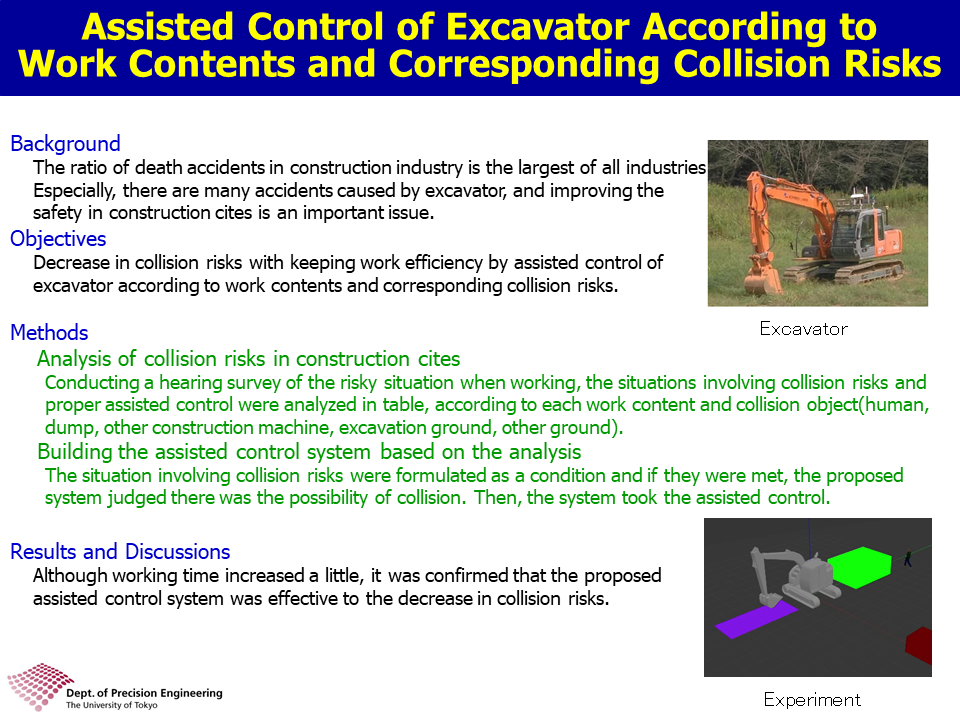
油圧ショベルの動作内容と衝突対象に応じた操作介入 Assisted Control of Excavator According to Work Contents and Corresponding Collision Risks |
修士進学 淺間研 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 学振 特別 研究 員 |
温 文 Wen Wen |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2017年4月 ~ 2018年7月 |
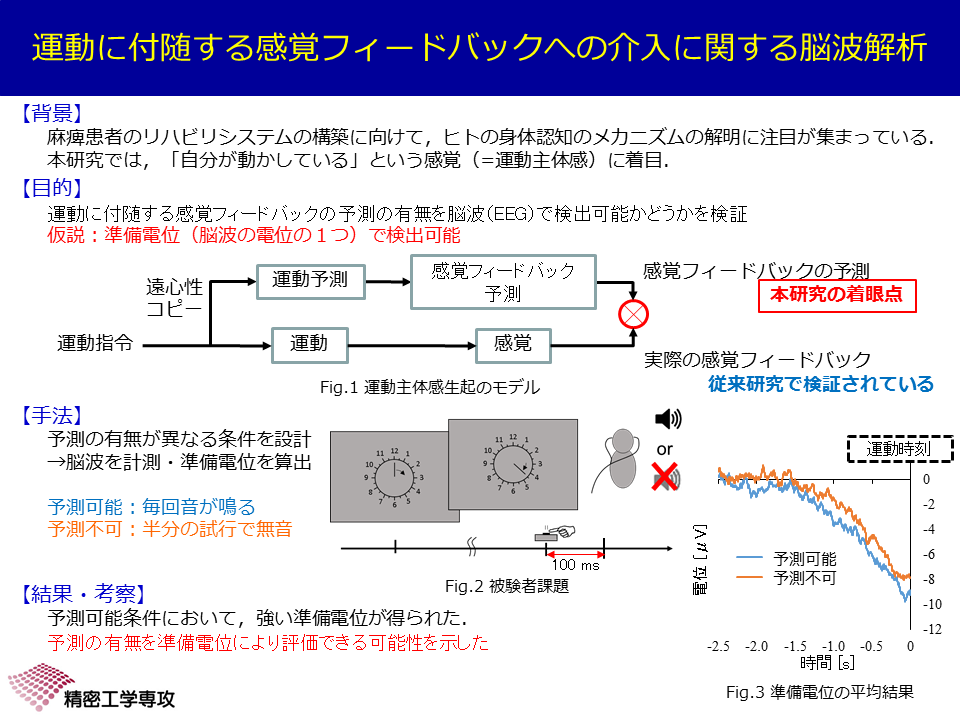
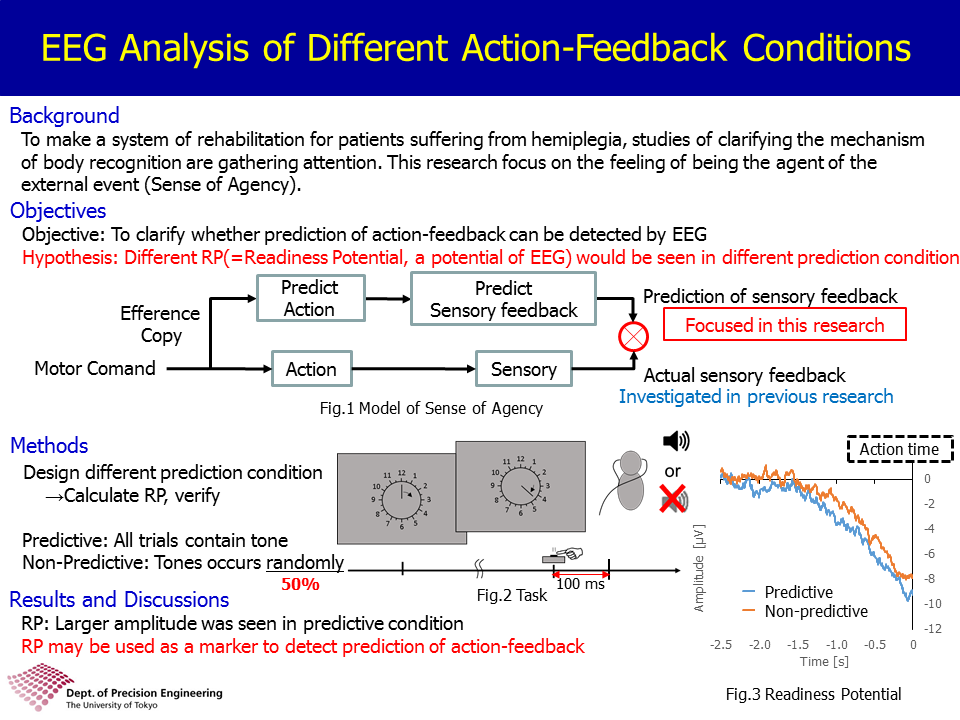
脳波信号を用いた身体意識の生起における時間特性の解明 | 特任准教授 淺間研 現・立教大学 准教授 |
| 学振 外国 人特 別研 究員 |
禹 ハンウル Hanwool Woo |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2018年4月 ~ 2019年3月 |
個人の運転特性推定に基づいた運転支援システムの構築 Development of A Driving Support System Based on Estimation of Personal Driving Characteristics |
秋田県立大学 助教 現・工学院大学 准教授 |
| 秘書 | 小島 里佳 Rika Kojima |
 |
- | - | 2015年4月 ~ 2018年7月 |
- | - |
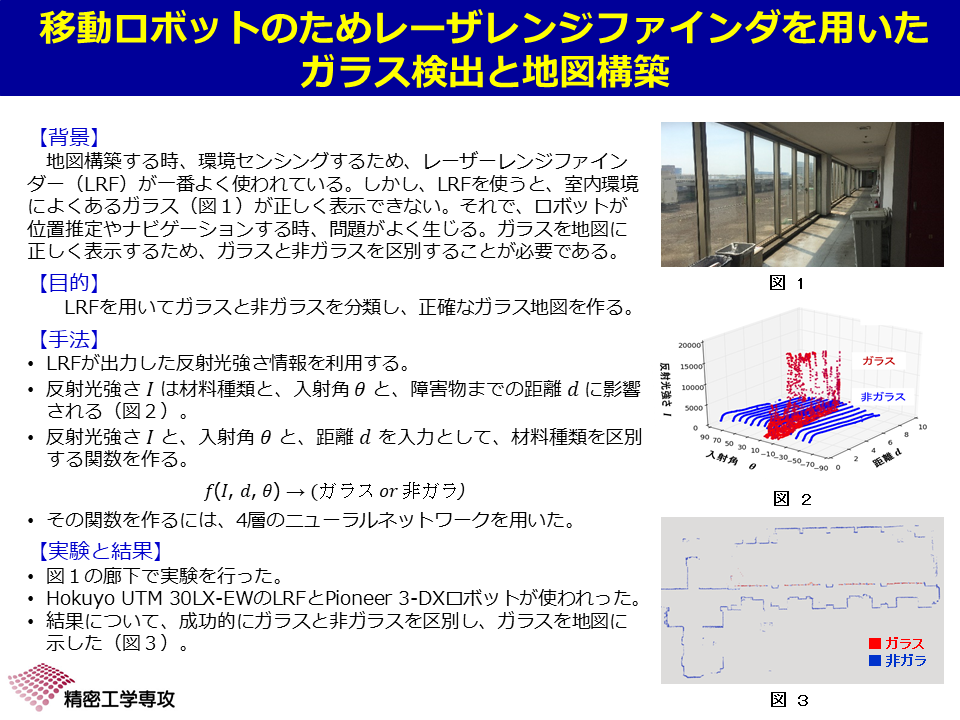
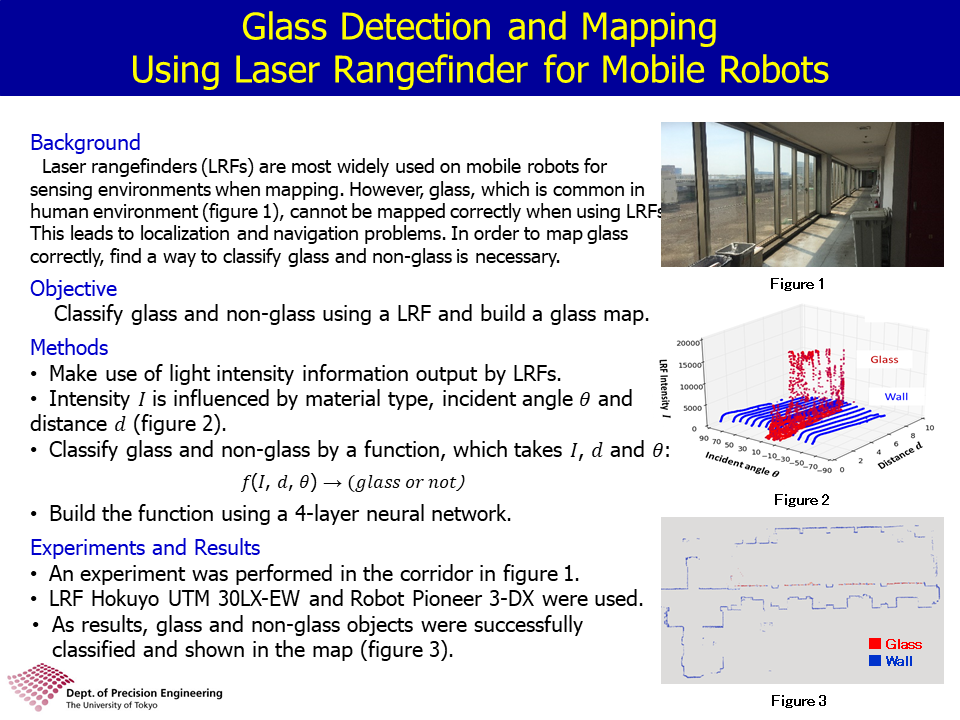
| 修士 14 |
江 君 Jun Jiang |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2016年10月 ~ 2018年9月 |
移動ロボットのためのレーザレンジファインダを用いたガラス存在環境の地図構築 Glass Confidence Map Building Using Laser Rangefinder for Mobile Robots |
就職 |
| 修士 15 |
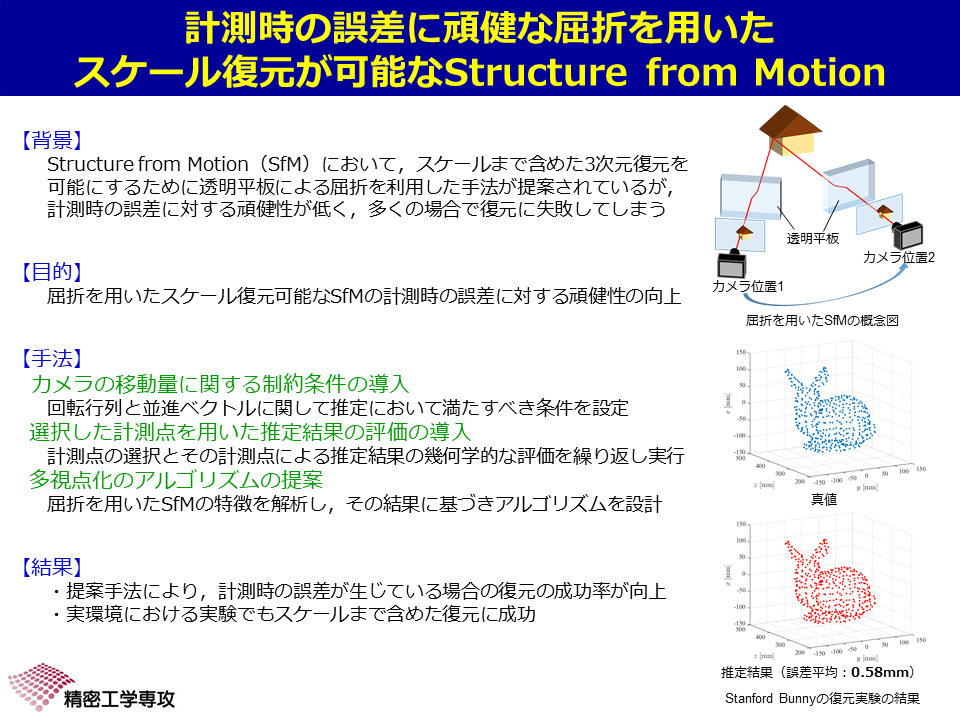
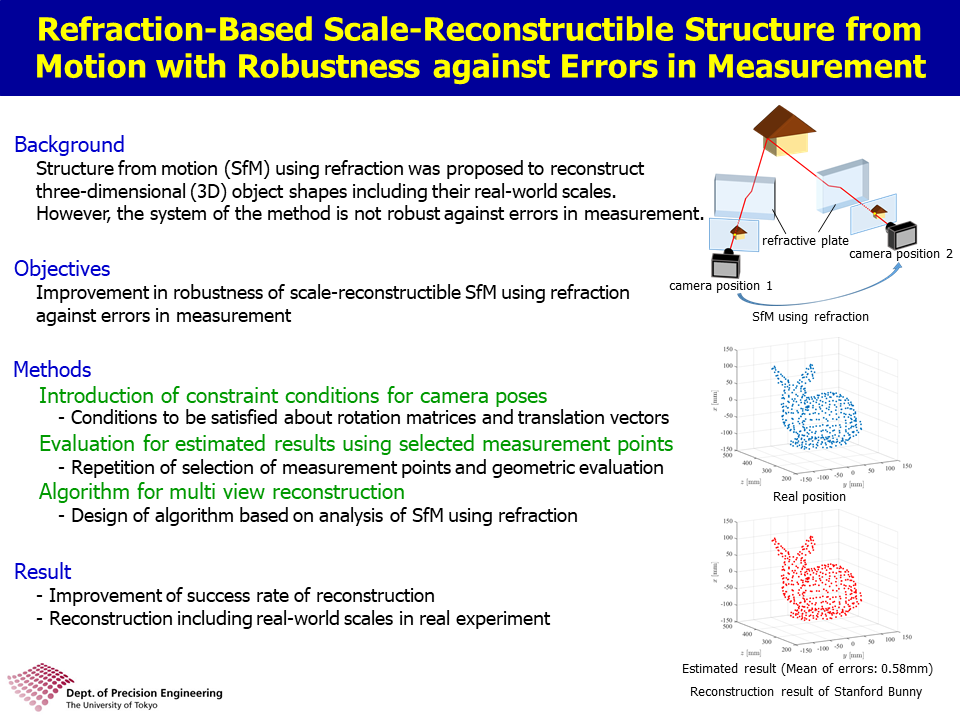
奥村 有加里 Yukari Okumura |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
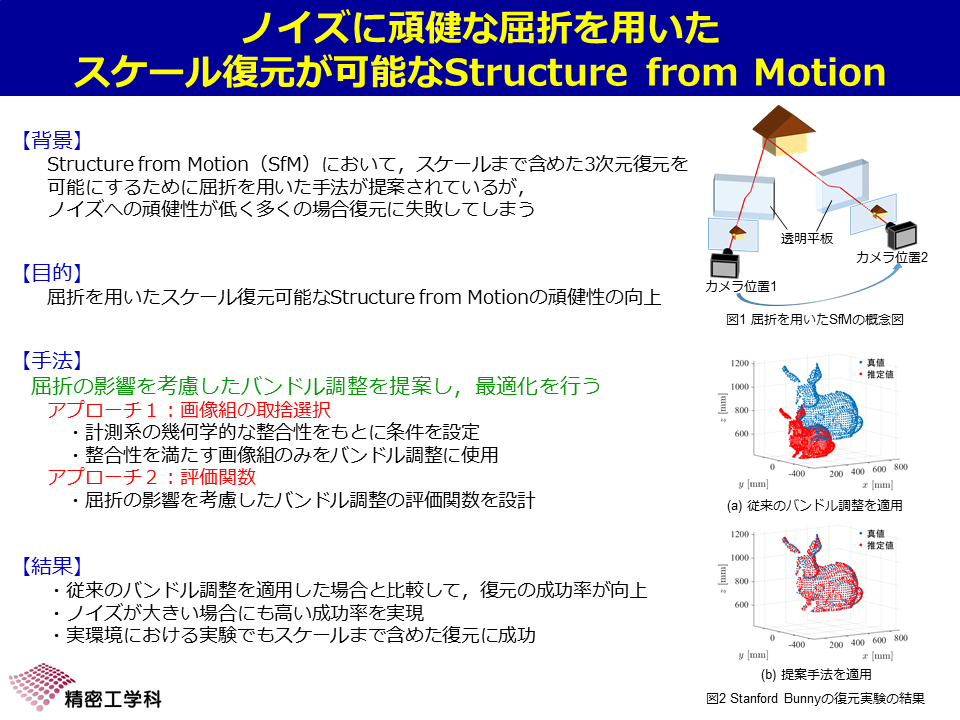
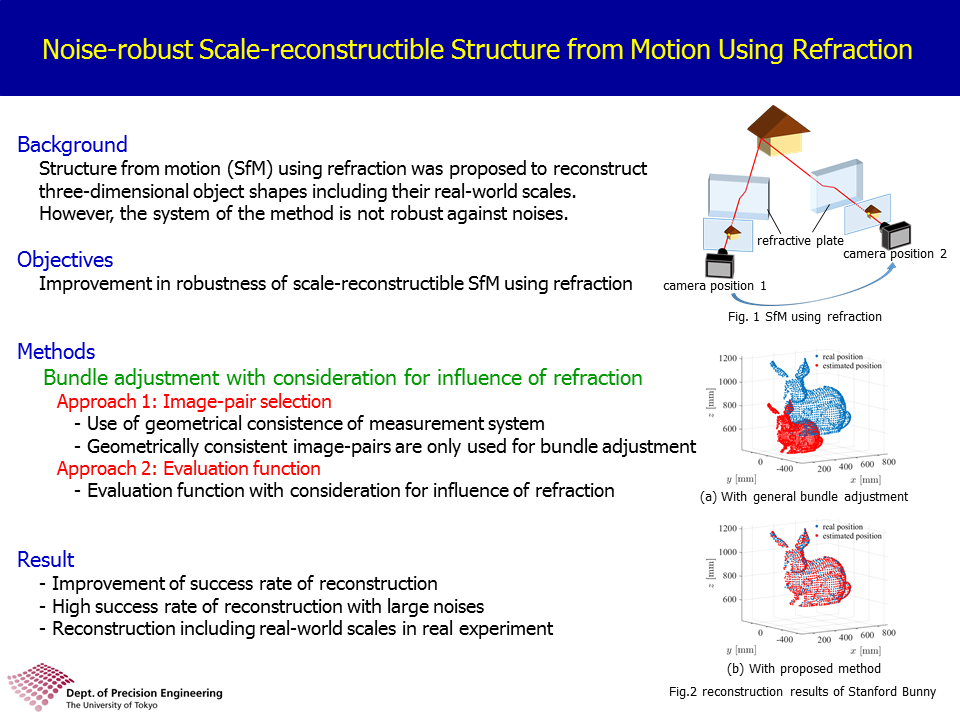
山下 淳 | 2017年4月 ~ 2019年3月 |
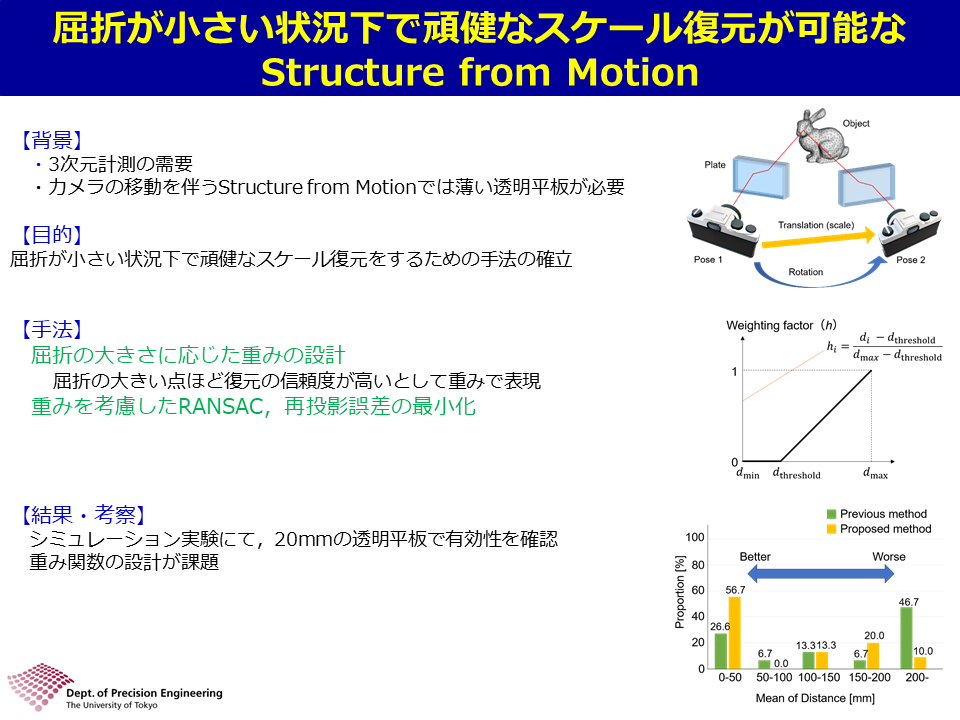
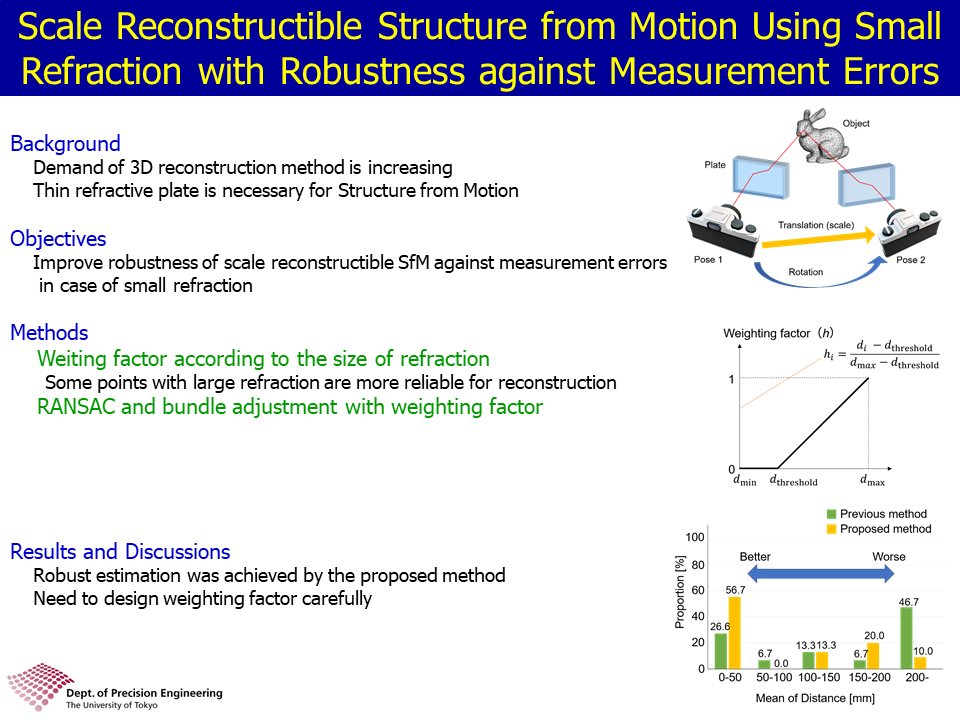
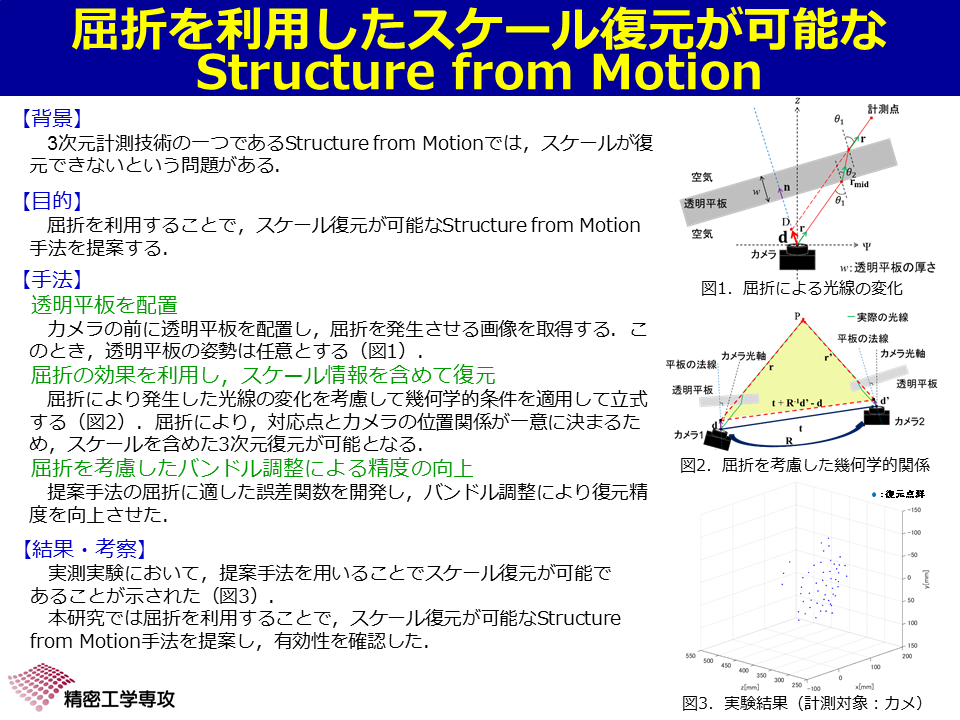
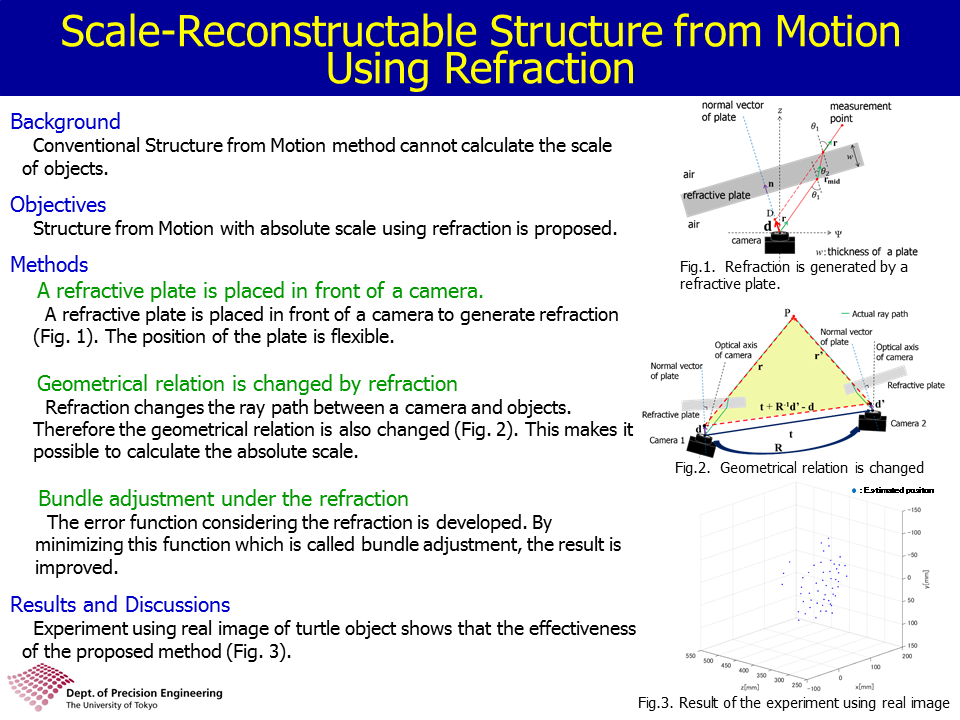
計測時の誤差に頑健な屈折を用いたスケール復元可能なStructure from Motion Refraction-Based Scale-Reconstructible Structure from Motion with Robustness against Errors in Measurement |
就職 |
| 修士 16 |
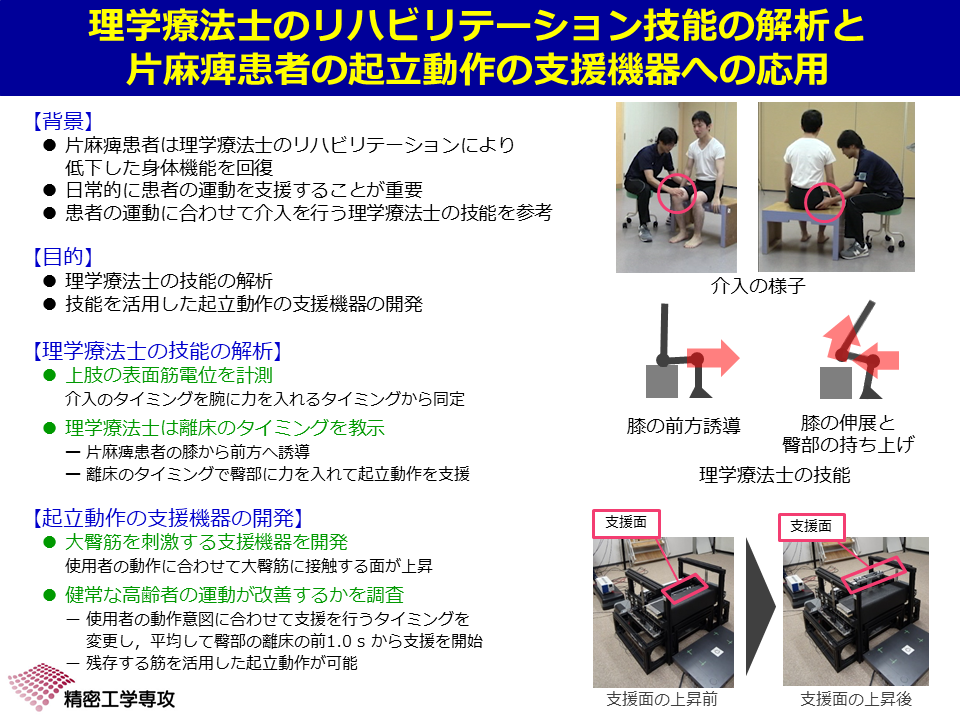
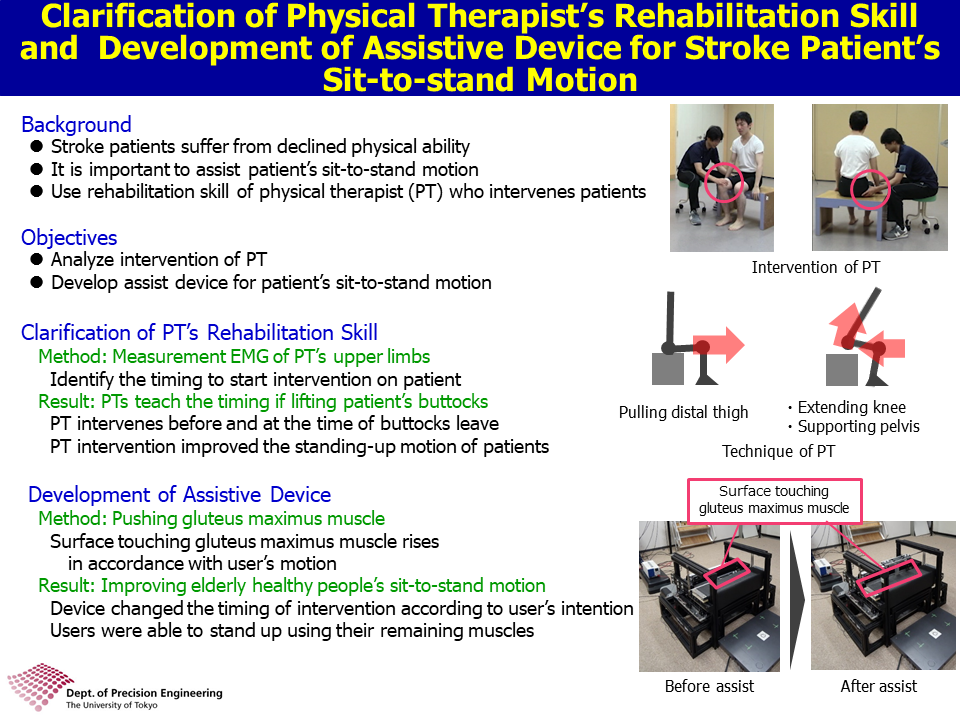
湖上 碩樹 Hiroki Kogami |
|
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2017年4月 ~ 2019年3月 |
理学療法士のリハビリテーション技能の解析と片麻痺患者の起立動作の支援機器への応用 Clarification of Physical Therapist's Rehabilitation Skill and Development of Assistive Device for Stroke Patient's Sit-to-stand Motion |
博士進学 淺間研 |
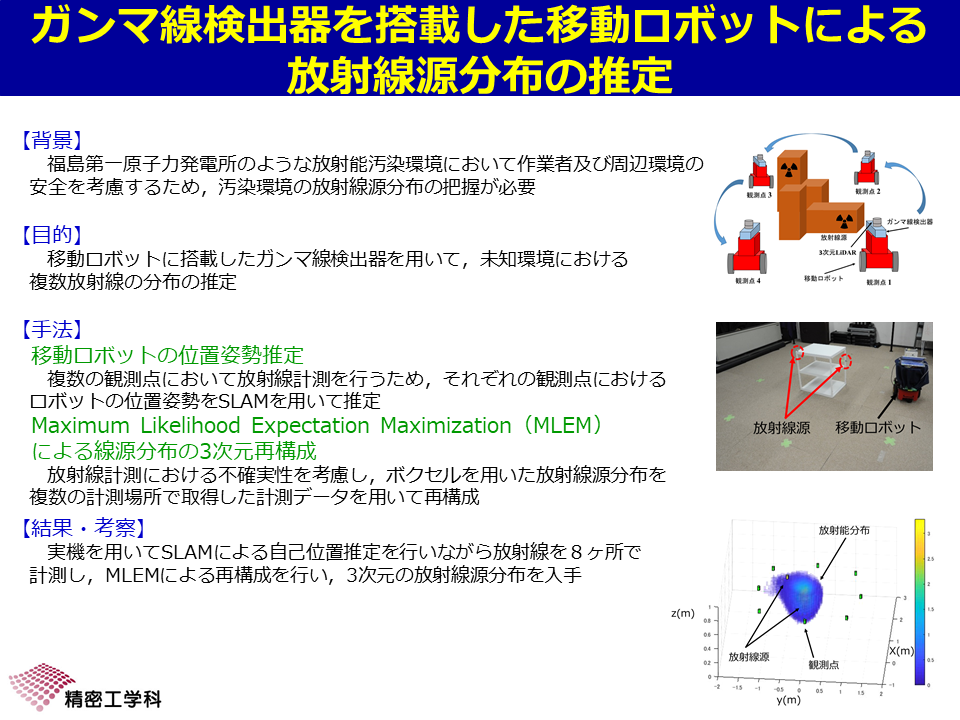
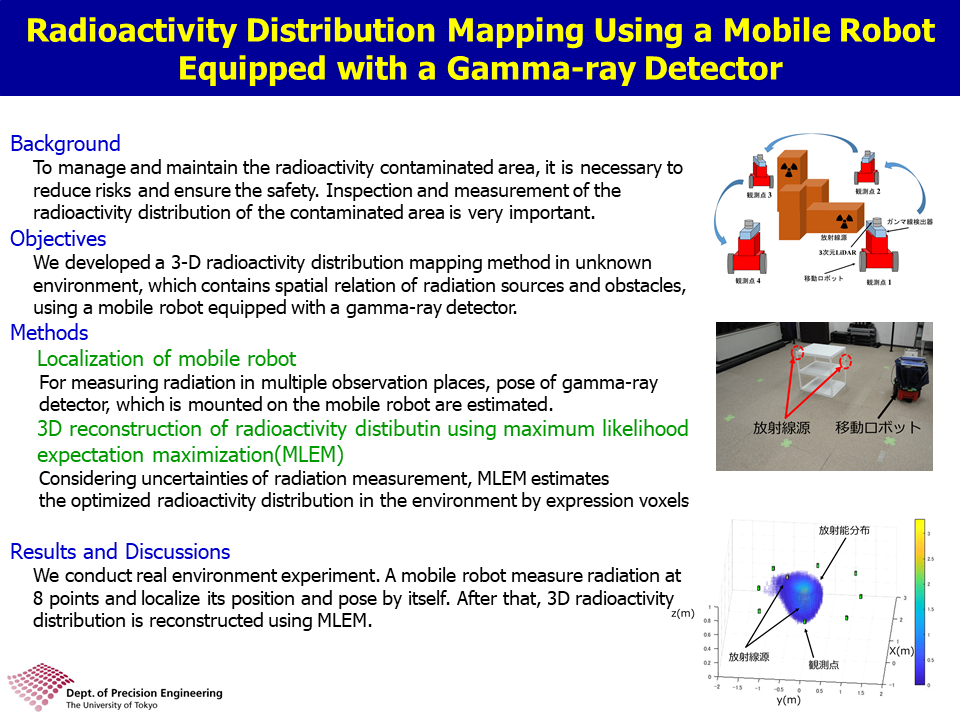
| 学部 13 |
岸本 卓也 Takuya Kishimoto |
|
東京大学 工学部 精密工学科 |
山下 淳 | 2018年4月 ~ 2019年3月 |
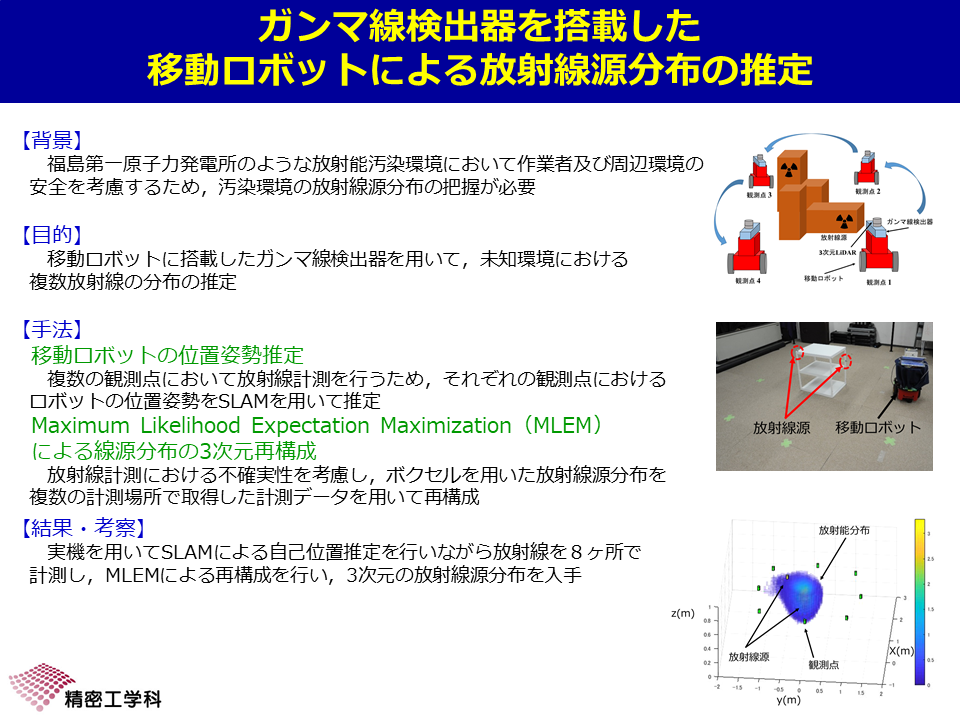
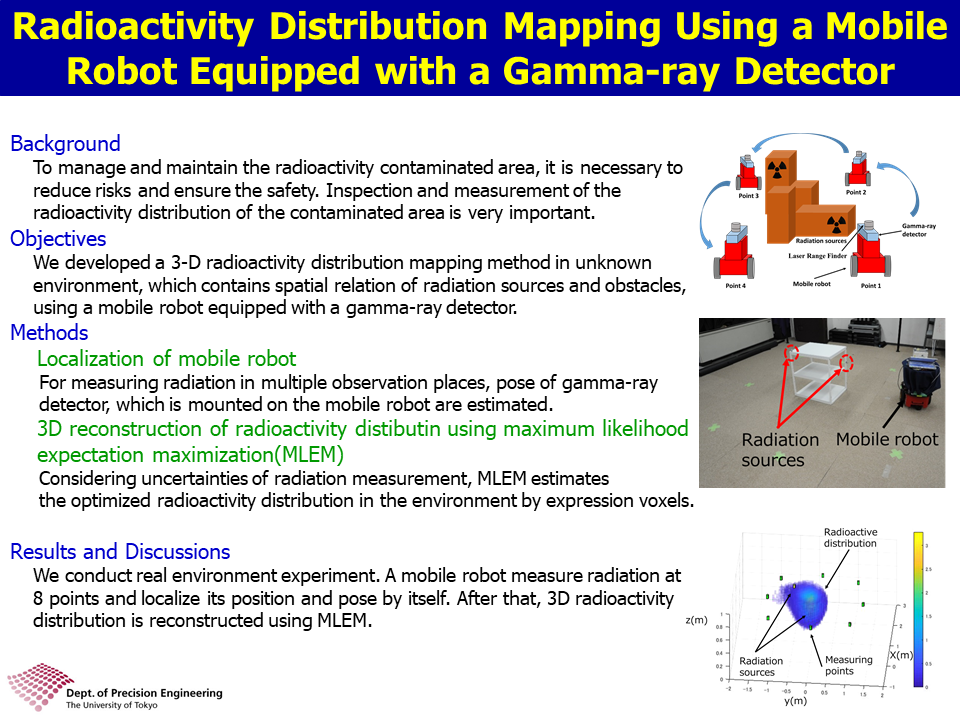
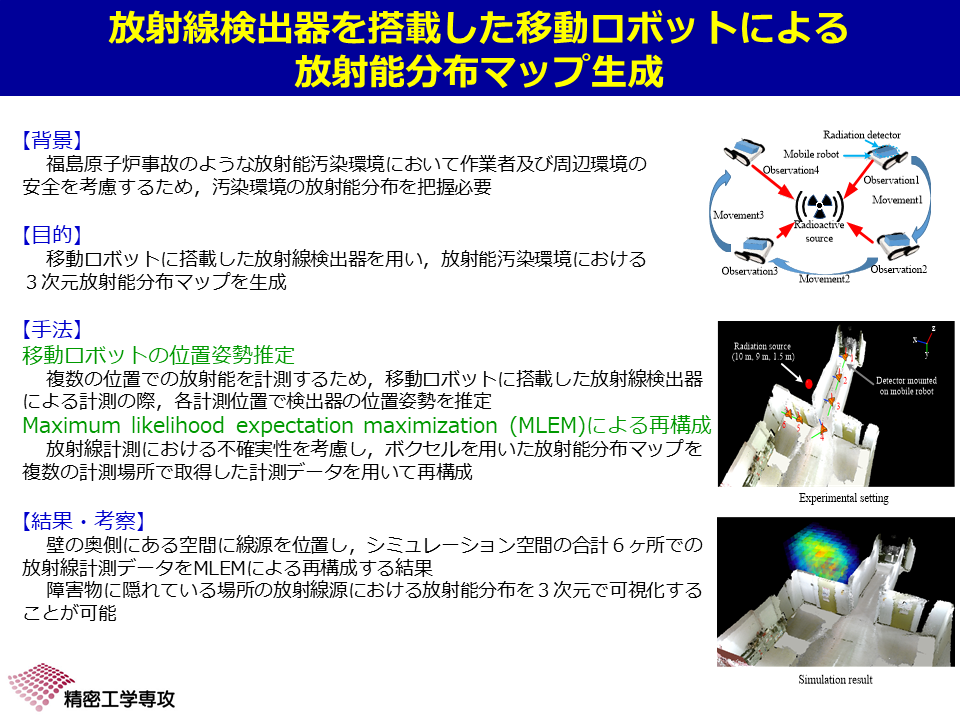
ガンマ線検出器を搭載した移動ロボットによる空間中の構造物を考慮した放射線源分布の3次元再構成 3D Reconstruction of Radiation Sources Considering Objects in Measurement Environment by a Mobile Robot Equipped with a Gamma-ray Detector |
修士進学 淺間研 |
| 学部 14 |
水野 秀哉 Shuya Mizuno |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2018年4月 ~ 2019年3月 |
遠隔操作ロボット走行時における機体の姿勢変化による転倒回避 Tumble Avoidance of Teleoperated Mobile Robots During Traveling Considering Arm Configuration |
修士進学 神保研 |
| 交 換 留 学 生 |
Simon Hucko |  |
RWTH Aachen University Germany |
山下 淳 | 2018年4月 ~ 2018年8月 |
- | - |
| 交 換 留 学 生 |
Nicolas Rabany |  |
EPFL Switzerland |
山下 淳 | 2018年10月 ~ 2019年3月 |
Sensor Model For Simultaneous Localization and Mapping in Glass Environment Using Laser Rangefinder | - |
| 博士 | ミヤグスク レナート Renato Miyagusuku |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2015年10月 ~ 2018年9月 |
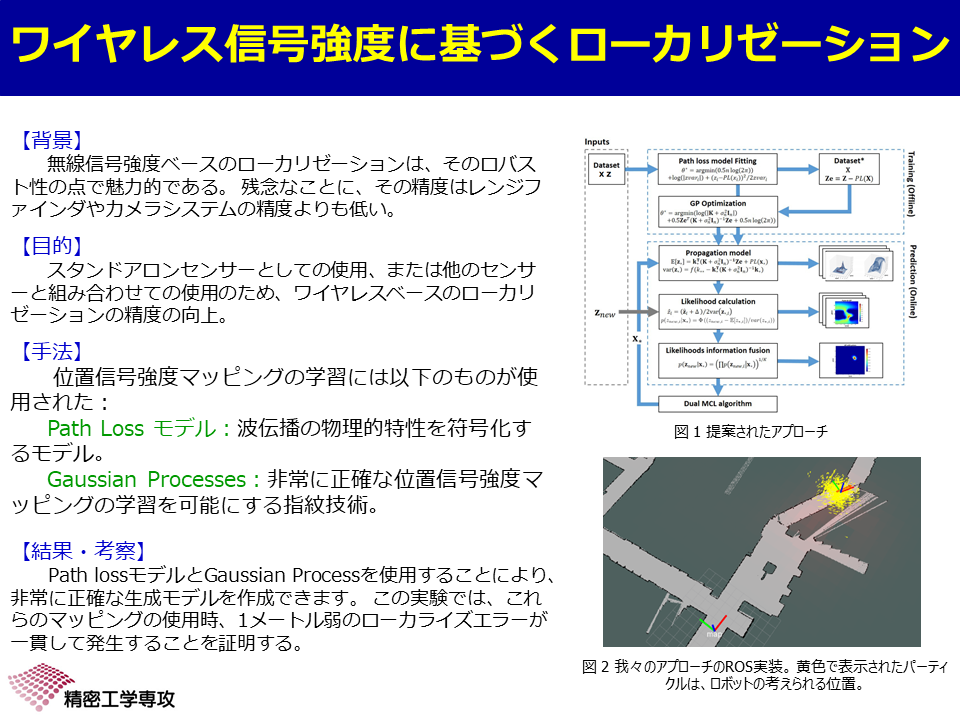
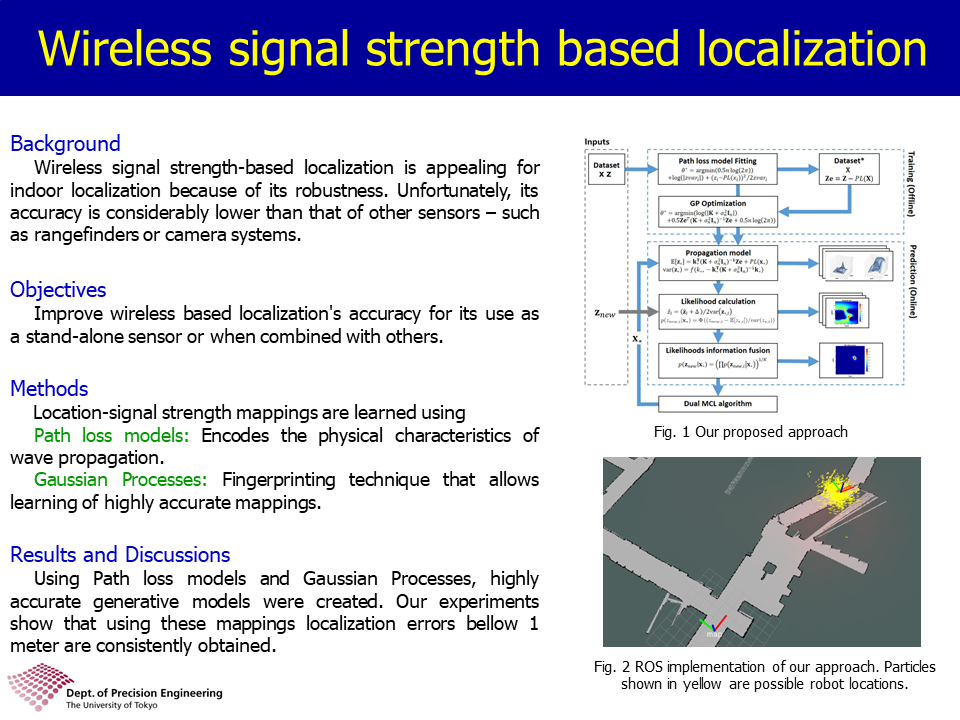
無線信号強度に基づく移動ロボットの自己位置同定のための理論的モデルとデータ駆動型モデルの統合 Integrating Theoretical and Data Driven Models for Wireless Signal Strength based Mobile Robot Localization |
特任研究員 現・宇都宮大学 准教授 |
| 修士 | 杉本 賢勇 Takao Sugimoto |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2017年4月 ~ 2019年3月 |
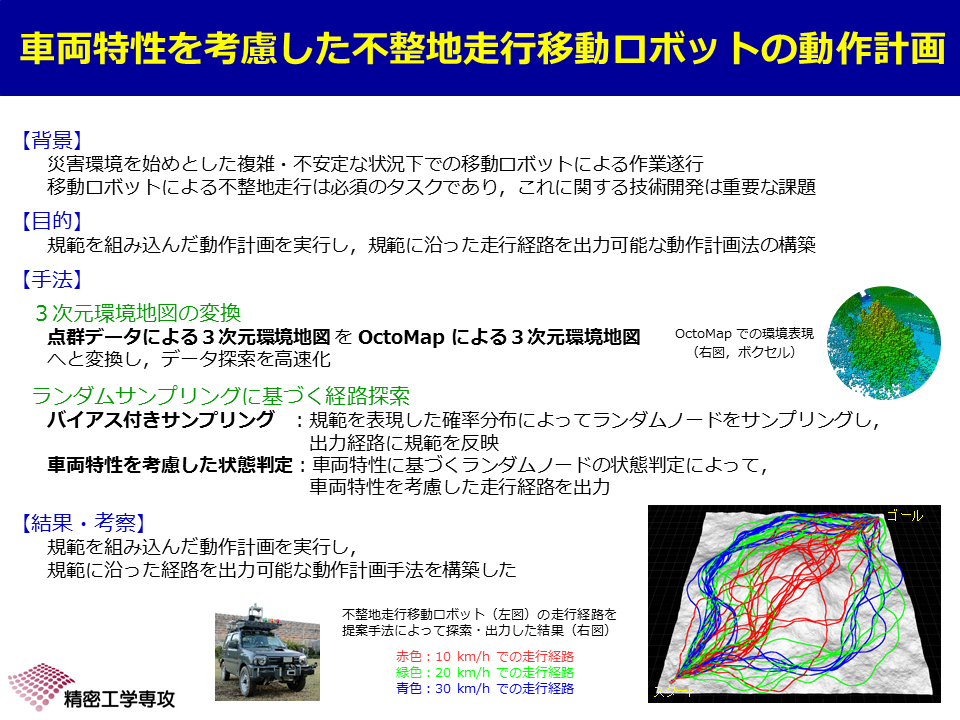
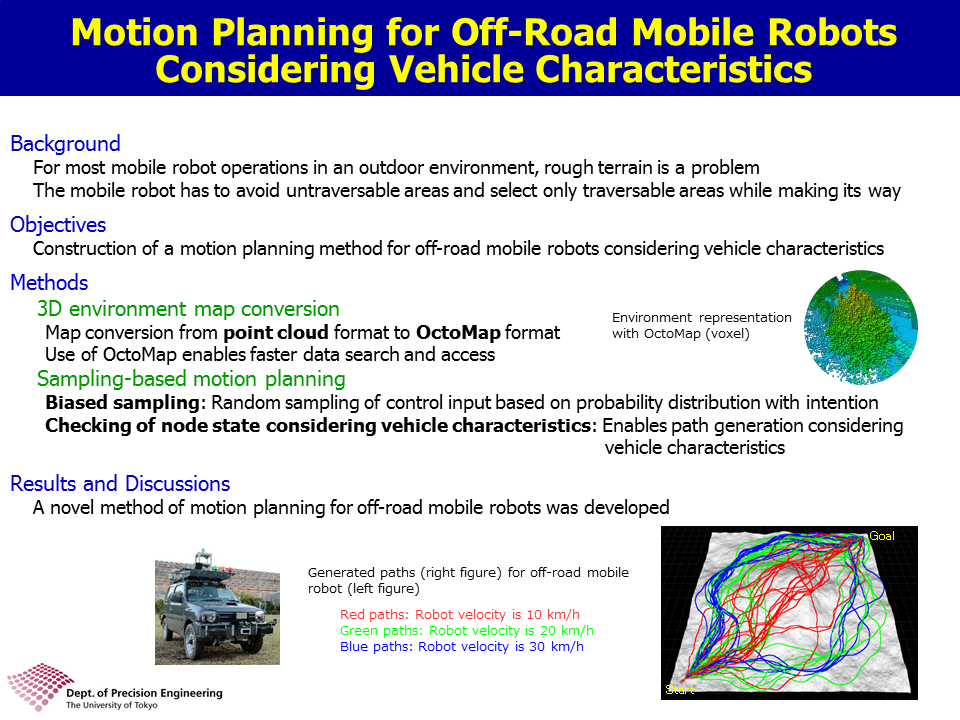
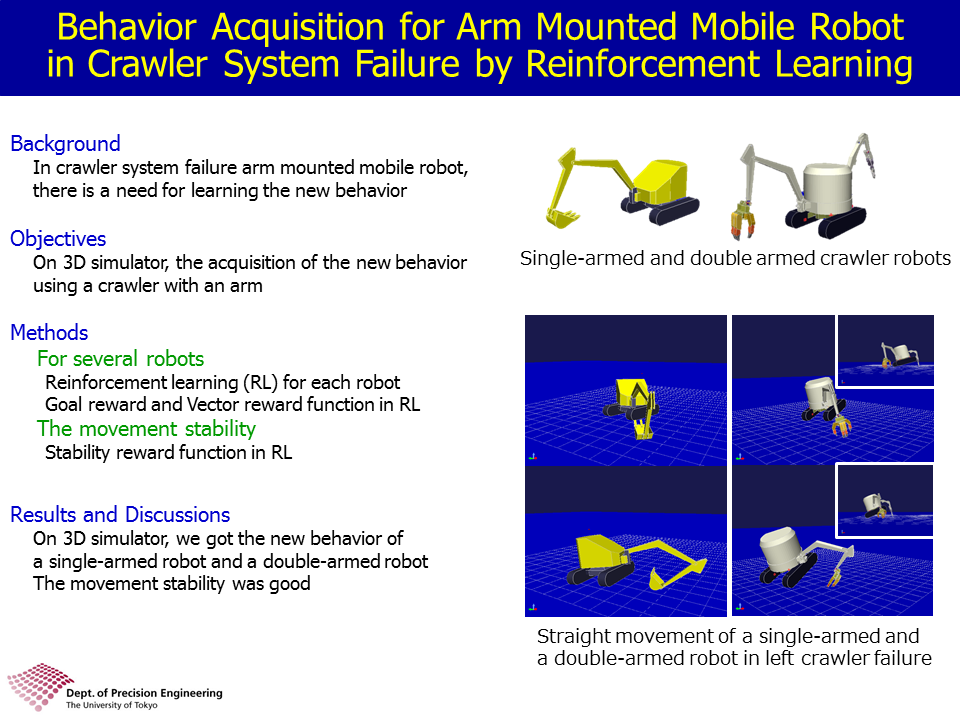
アーム搭載クローラロボットの負荷トルクを考慮した強化学習によるクローラ故障時における行動獲得 Behavior Acquisition with Consideration of Load Torque for Arm Mounted Mobile Robot in Crawler System Failure by Reinforcement Learning |
就職 |
| 修士 | 森山 湧志 Yushi Moriyama |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2017年4月 ~ 2019年3月 |
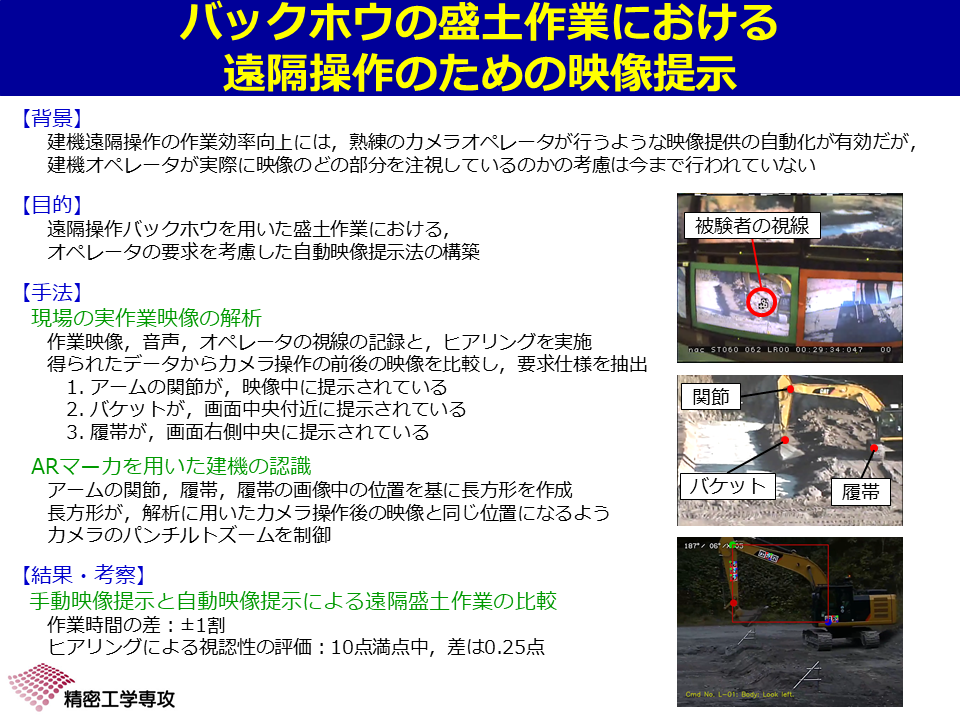
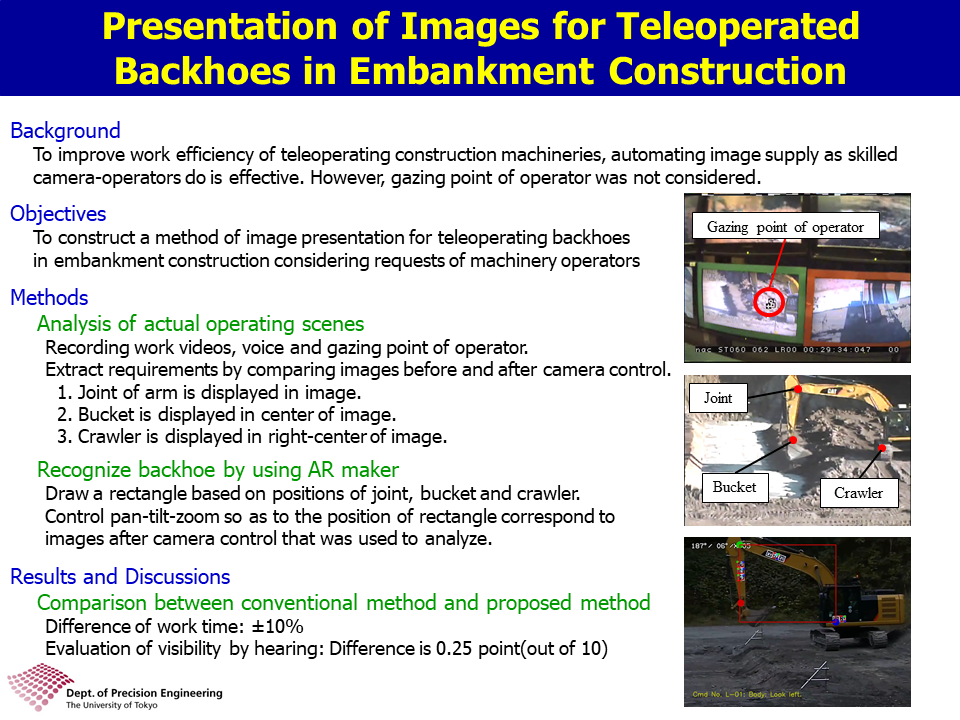
バックホウの盛土作業における遠隔操作のための映像提示 Presentation of Images for Backhoe Teleoperation in Embankment Construction |
就職 |
| 学部 | 勝間 慎弥 Shinya Katsuma |
|
東京大学 工学部 精密工学科 |
淺間 一 | 2018年4月 ~ 2019年3月 |
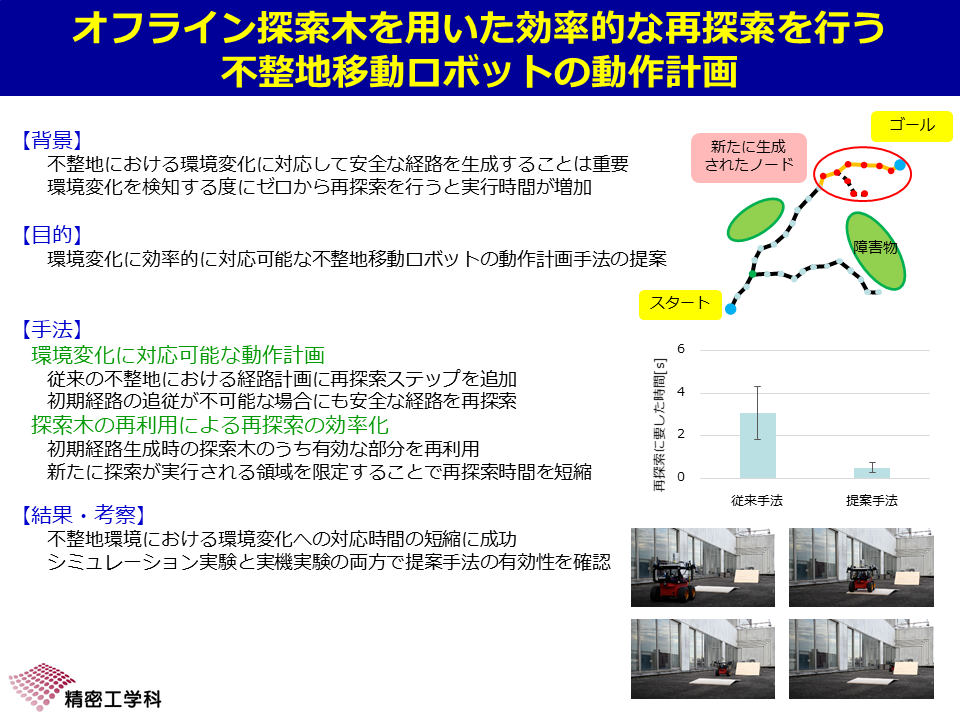
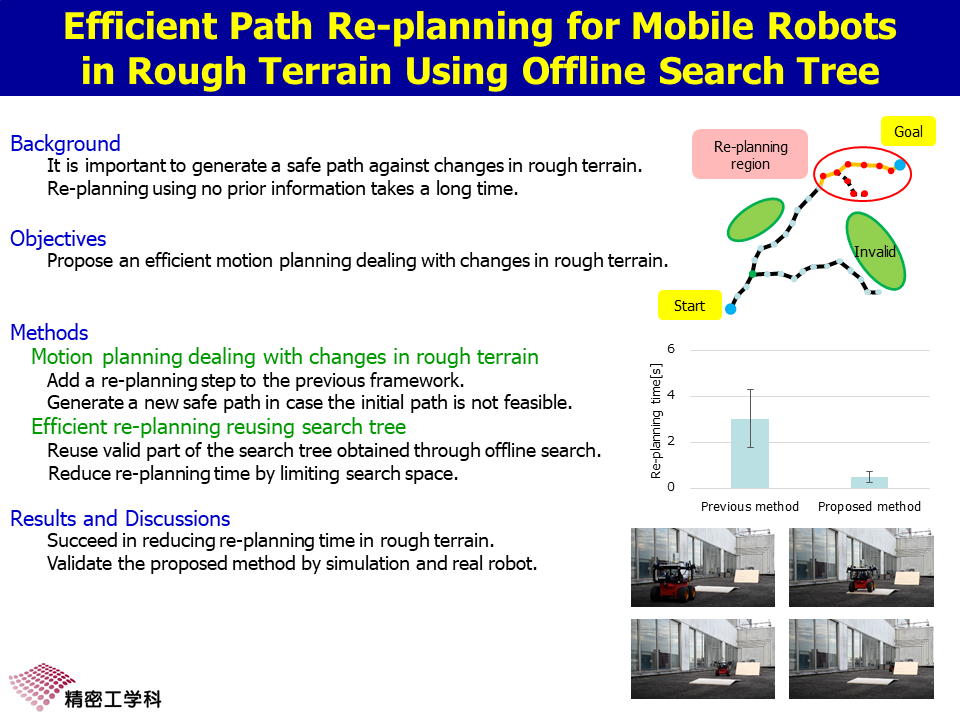
オフライン探索の結果を用いた効率的な再探索を行う不整地移動ロボットの動作計画 Efficient Path Re-Planning for Mobile Robots in Rough Terrain Using Offline Search Tree |
修士進学 淺間研 |
| 学部 | 杉本 瑞生 Mizuki Sugimoto |
|
東京大学 工学部 精密工学科 |
淺間 一 | 2018年4月 ~ 2019年3月 |
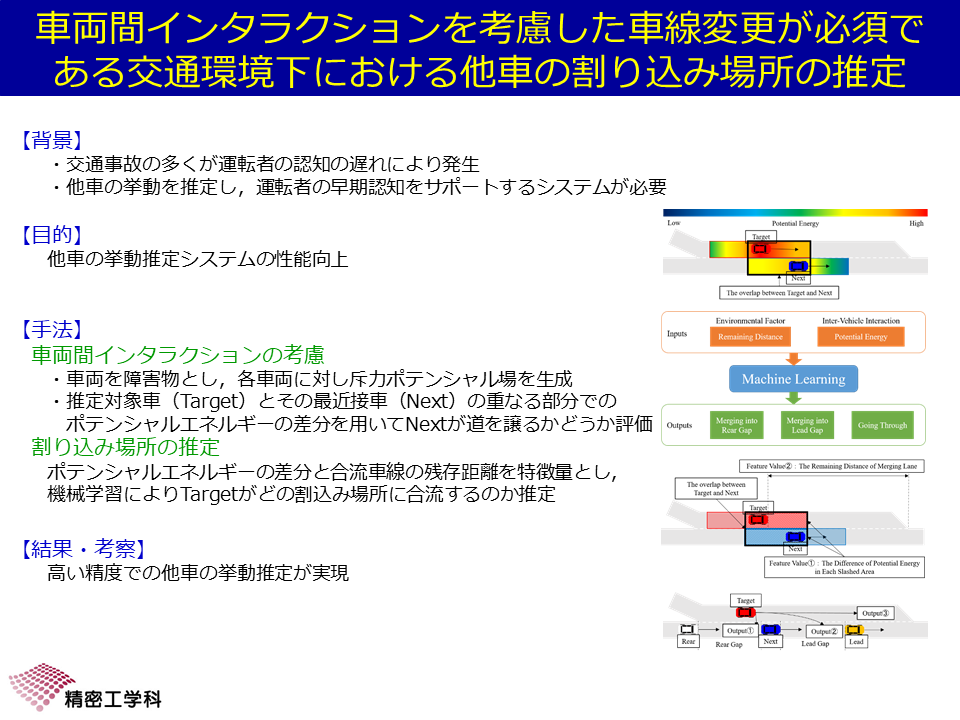
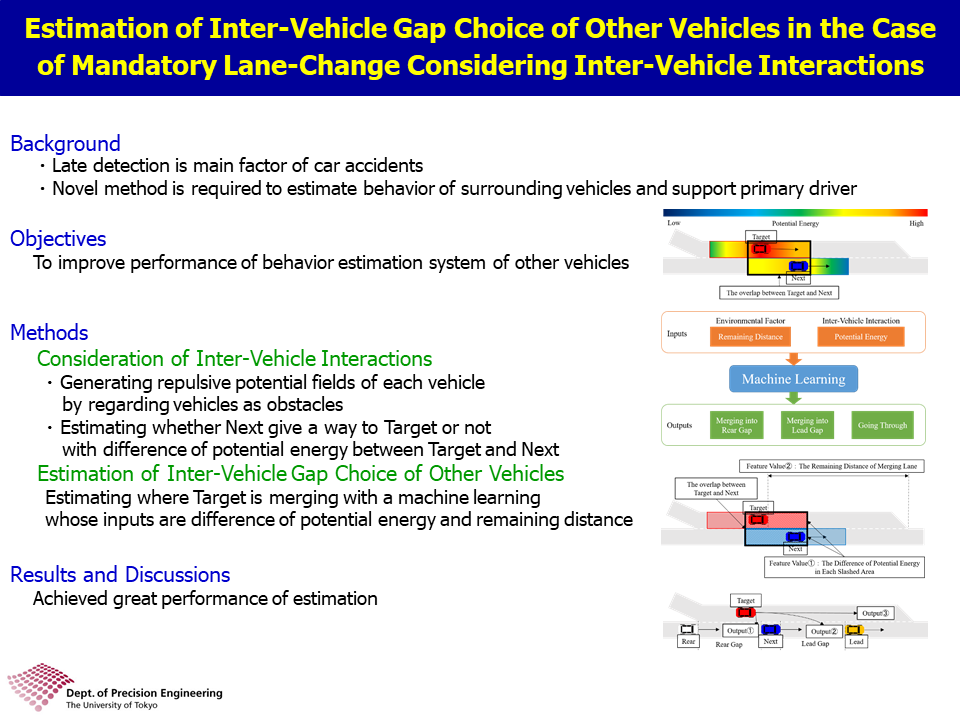
車両間インタラクションを考慮した車線変更が必須である交通環境下における他車の割り込み場所の推定 Estimation of Inter-Vehicle Gap Choice of Other Vehicles in the Case of Mandatory Lane-Change Considering Inter-Vehicle Interactions |
修士進学 山下研 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 秘書 | 江 えいぎ Eigi Koh |
 |
- | - | 2014年4月 ~ 2015年3月 |
- | - |
| 修士 1 |
坂本 一樹 Kazuki Sakamoto |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2013年4月 ~ 2015年3月 |
魚眼ステレオカメラを用いた屈折率未知環境下における液中物体の3次元計測 3-D Measurement of Objects in Unknown Liquid Using Fisheye Stereo Camera |
就職 |
| 修士 2 |
杉本 和也 Kazuya Sugimoto |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2013年4月 ~ 2015年3月 |
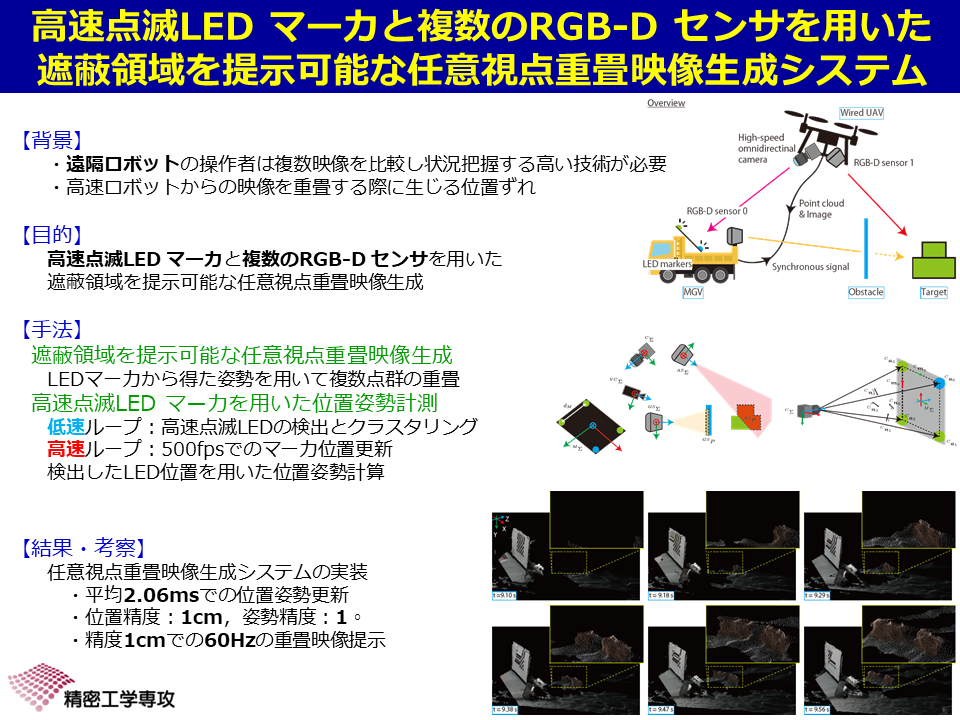
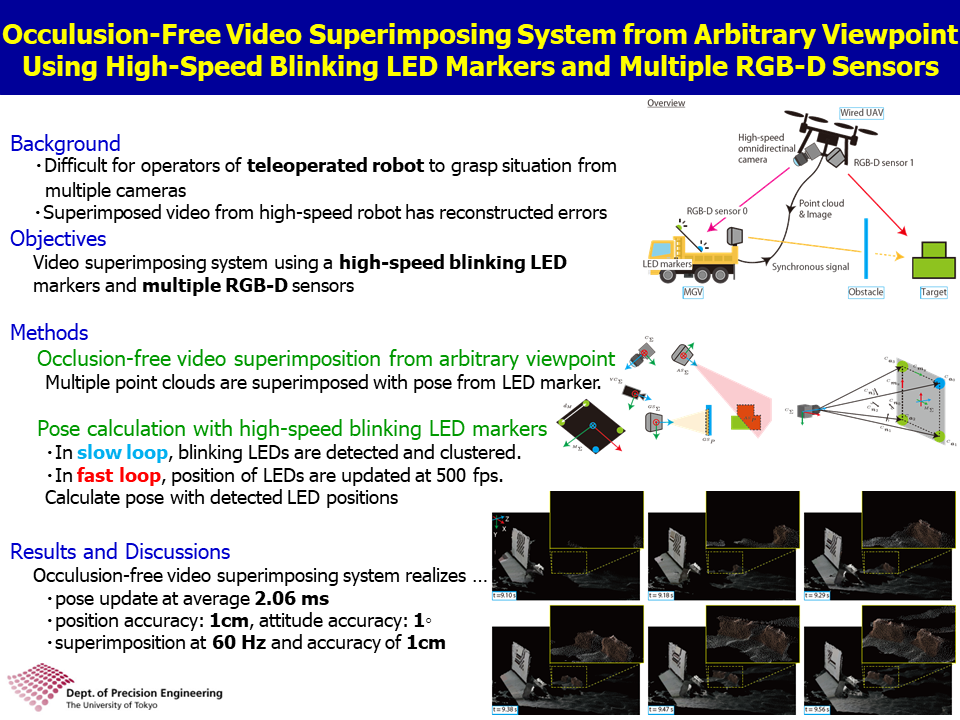
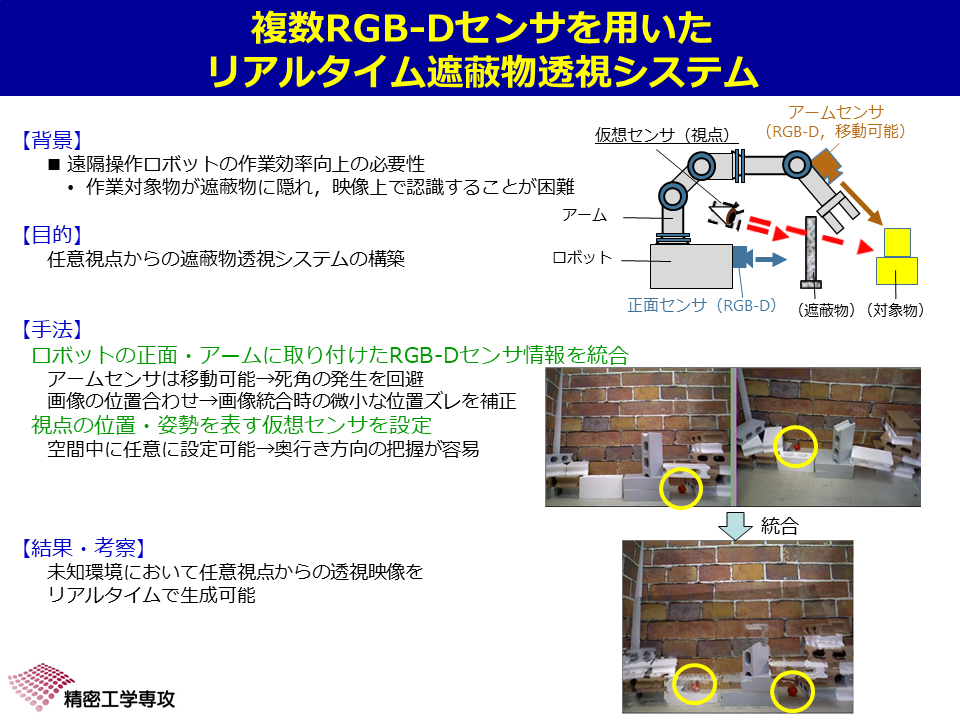
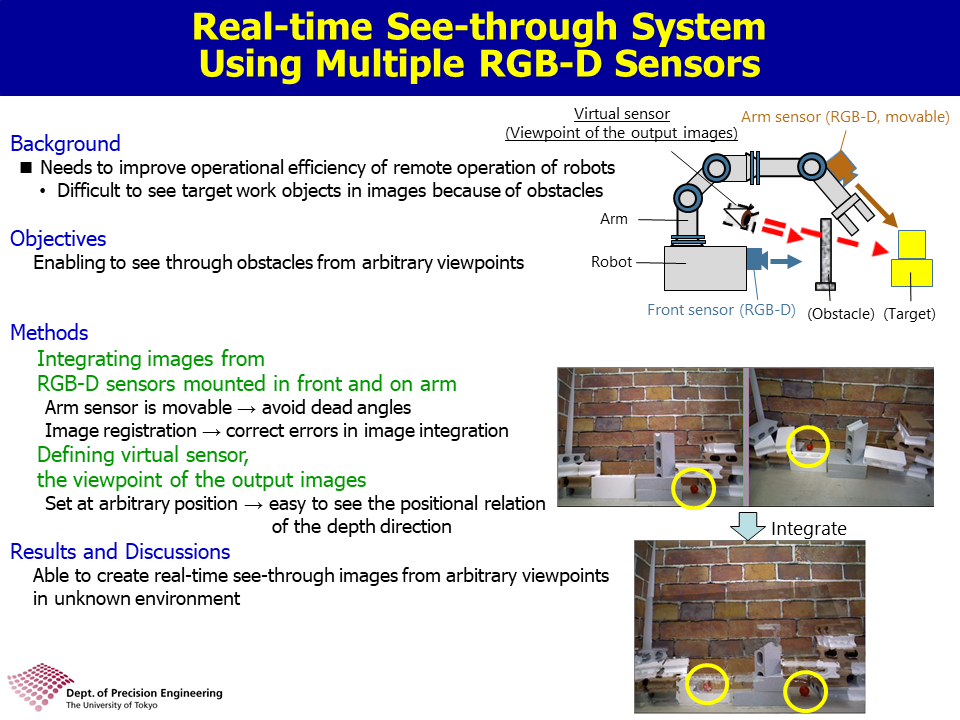
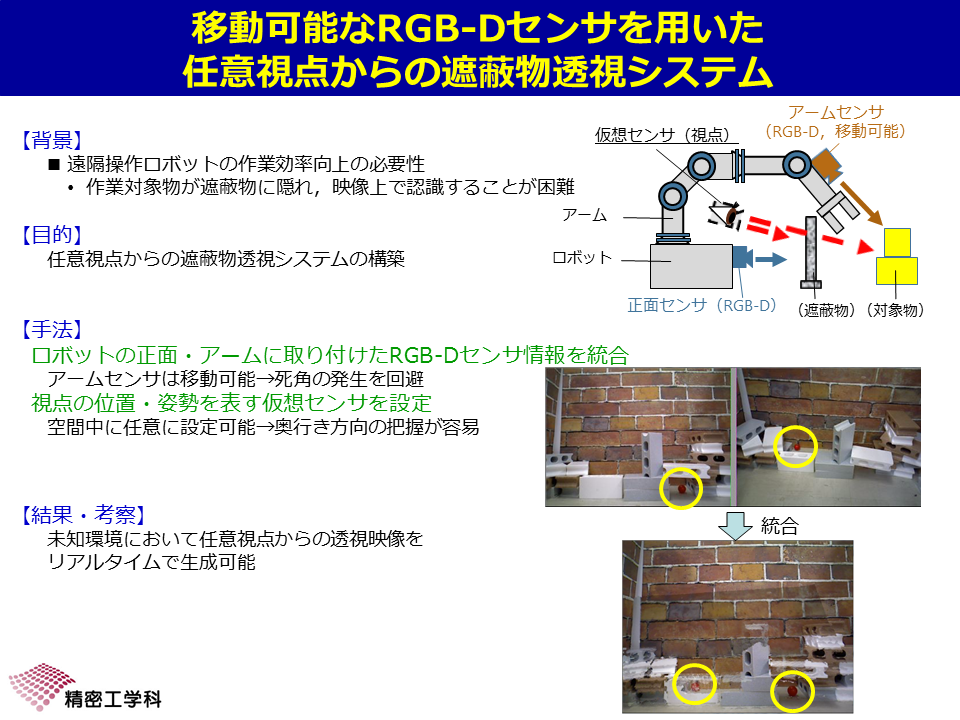
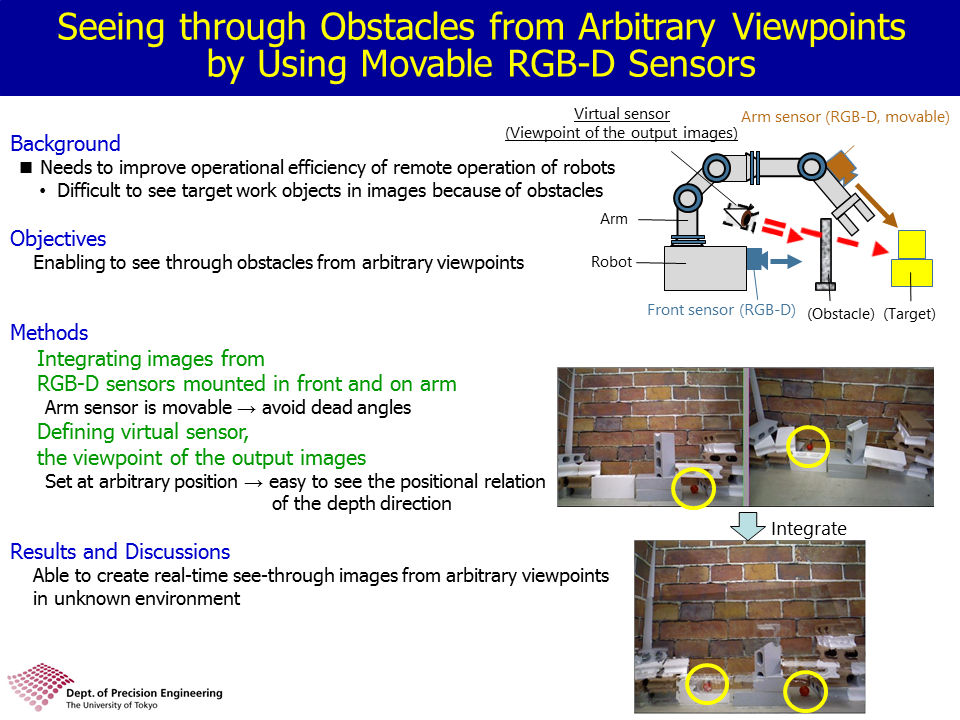
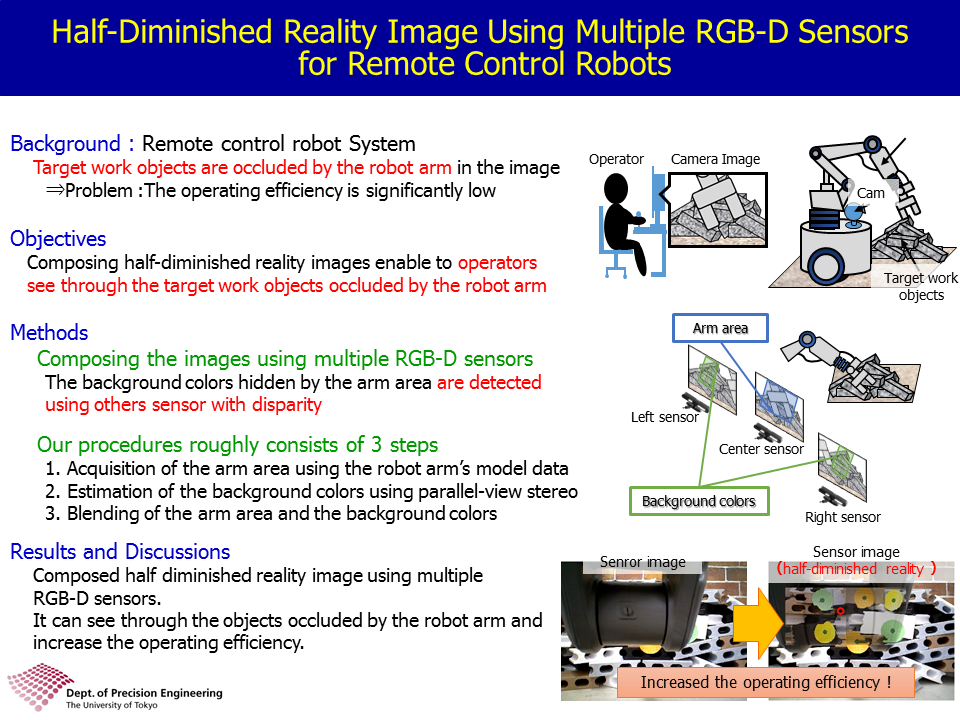
遠隔操作ロボットのための複数RGB-Dセンサを用いた半隠消映像生成システムの構築 Half-diminished Realtiy Image using Multipul RGB-D Sensors for Remote Control Robot |
就職 |
| 修士 3 |
中川 純希 Junki Nakagawa |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2013年4月 ~ 2015年3月 |
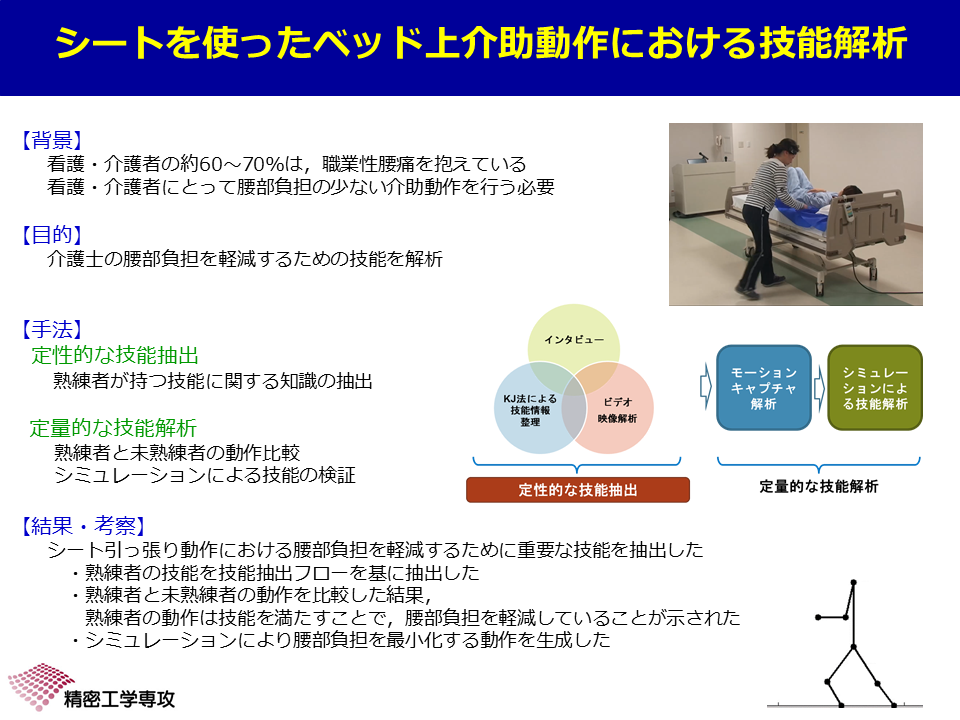
シートを使ったベッド上介助動作における技能解析 Analysis of Nursing Skill in Bed Care Motion Using Sliding Sheet |
就職 |
| 学部 5 |
竹内 彰 Akira Takeuchi |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2014年4月 ~ 2015年3月 |
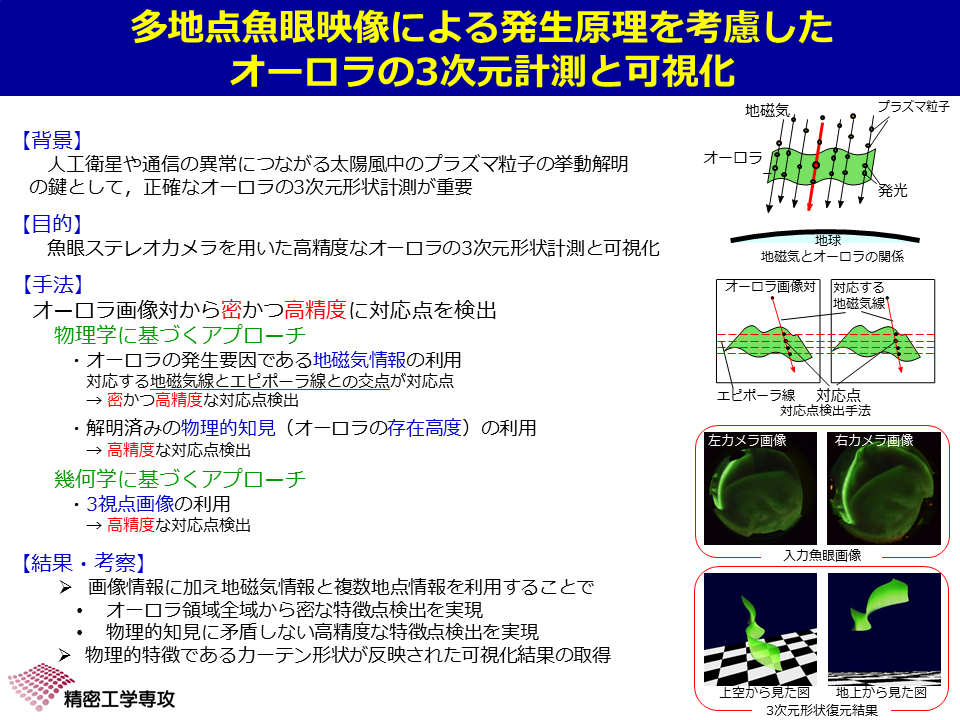
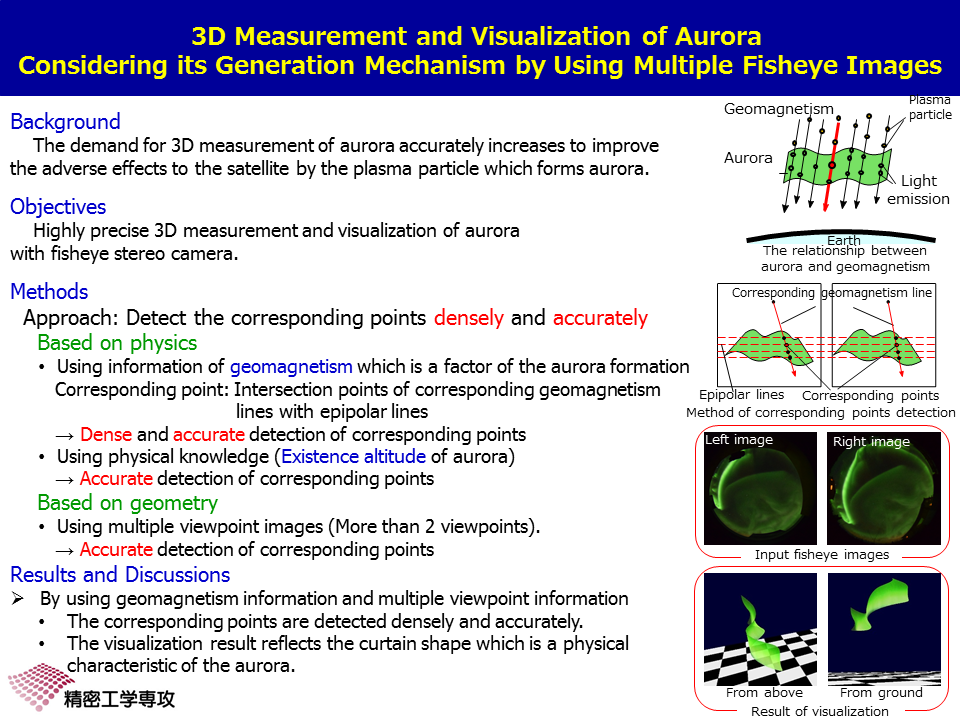
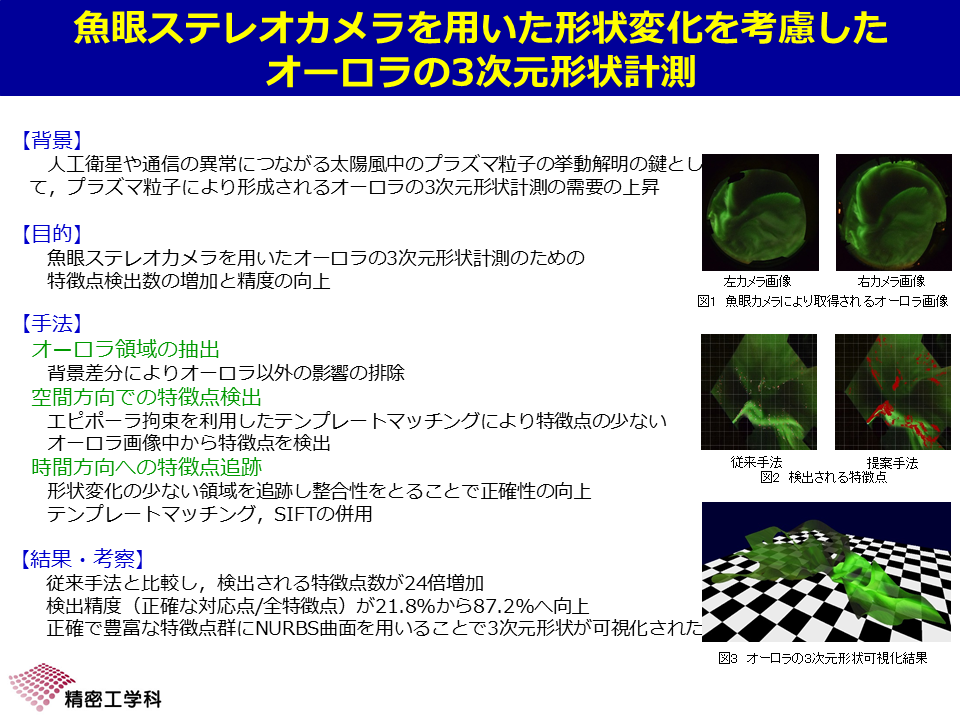
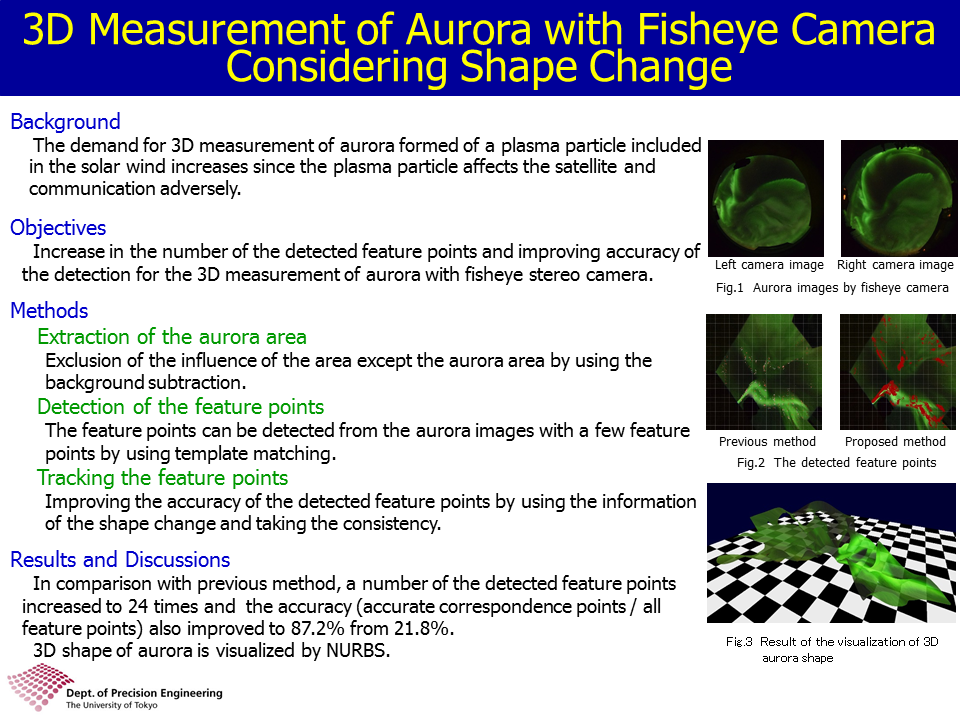
魚眼ステレオカメラを用いた形状変化を考慮したオーロラの3次元形状計測 3D Measurement of Aurora with Stereo Fisheye Camera Considering Shape Change |
修士進学 山下研 |
| 学部 6 |
中野 信泰 Nobuyasu Nakano |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2014年4月 ~ 2015年3月 |
姿勢の差異がジャンプ動作中の腰部負荷に与える影響の解析 Analysis of the Effect of Posture on Lumber Load during the Jump Motion |
修士進学 総合文化研究科 |
| 研 究 生 |
徐 彬斌 Binbin Xu |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
山下 淳 | 2014年10月 ~ 2015年3月 |
- | 修士進学 山下研 |
| 博士 | 安 琪 Qi An |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2011年10月 ~ 2014年9月 |
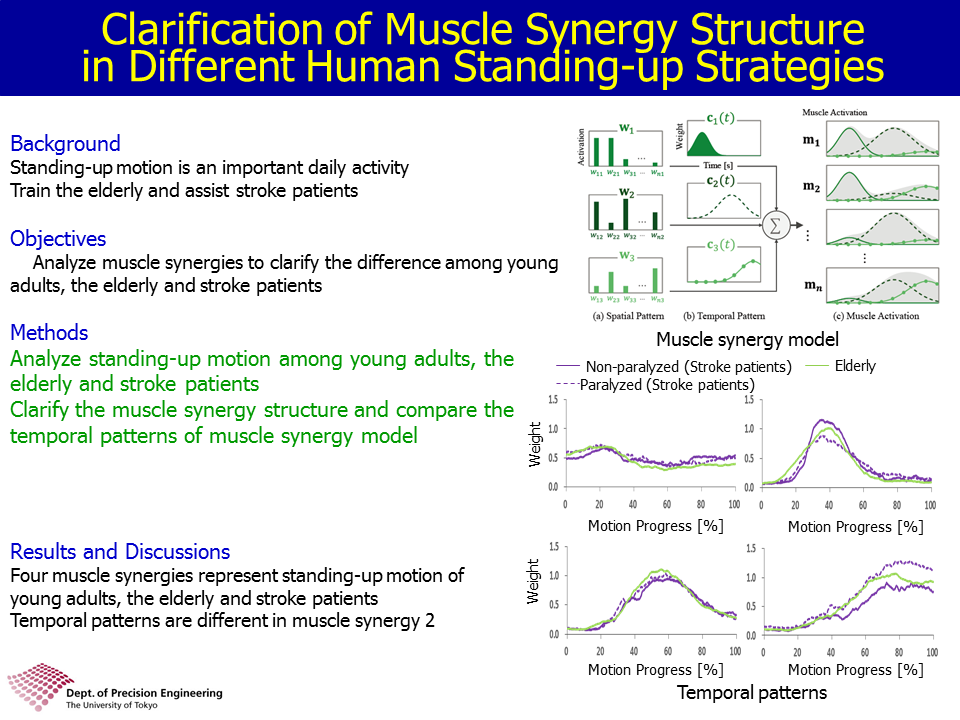
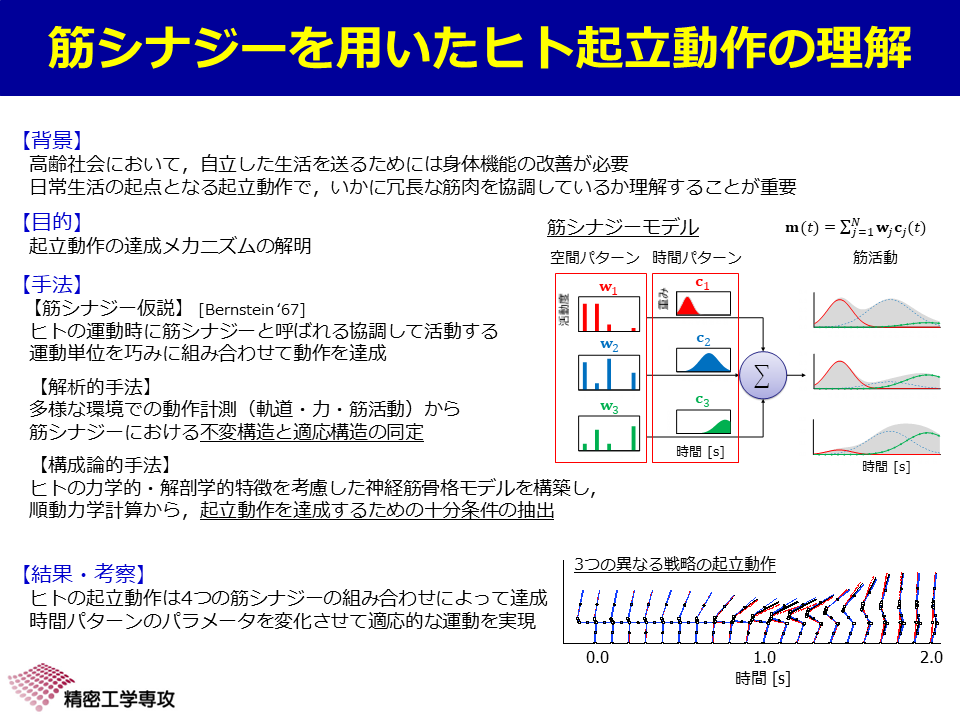
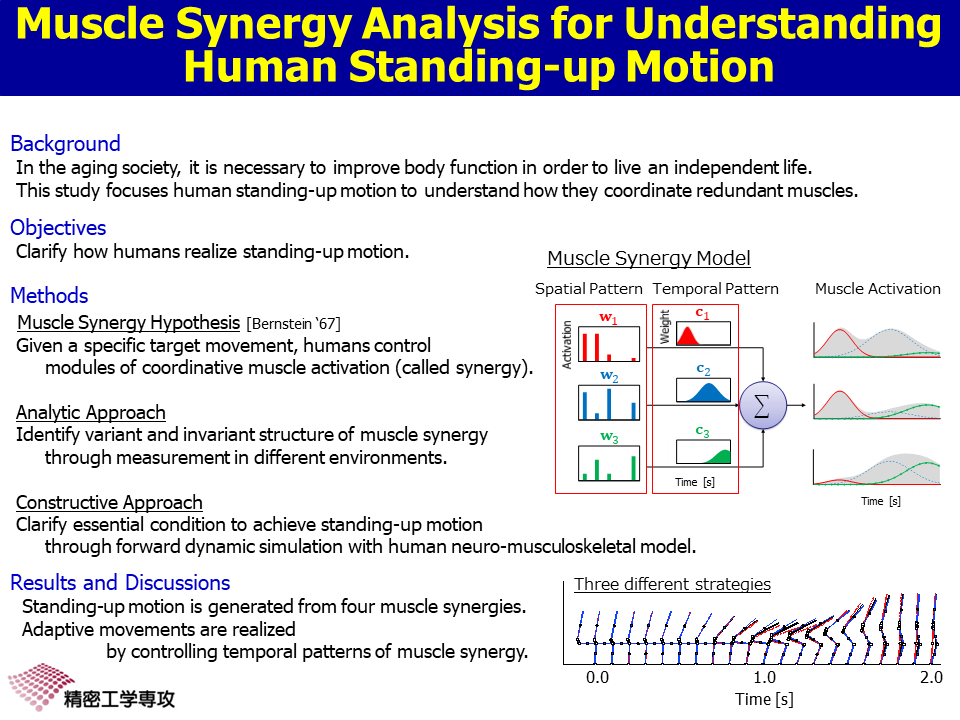
筋シナジーを用いたヒトの起立動作のモデル化と構成論的理解 Modeling and Constructive Understanding of Human Standing-up Motion Using Muscle Synergy |
特任研究員 現・准教授 |
| 修士 | 伊部 直樹 Naoki Ibe |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2013年4月 ~ 2015年3月 |
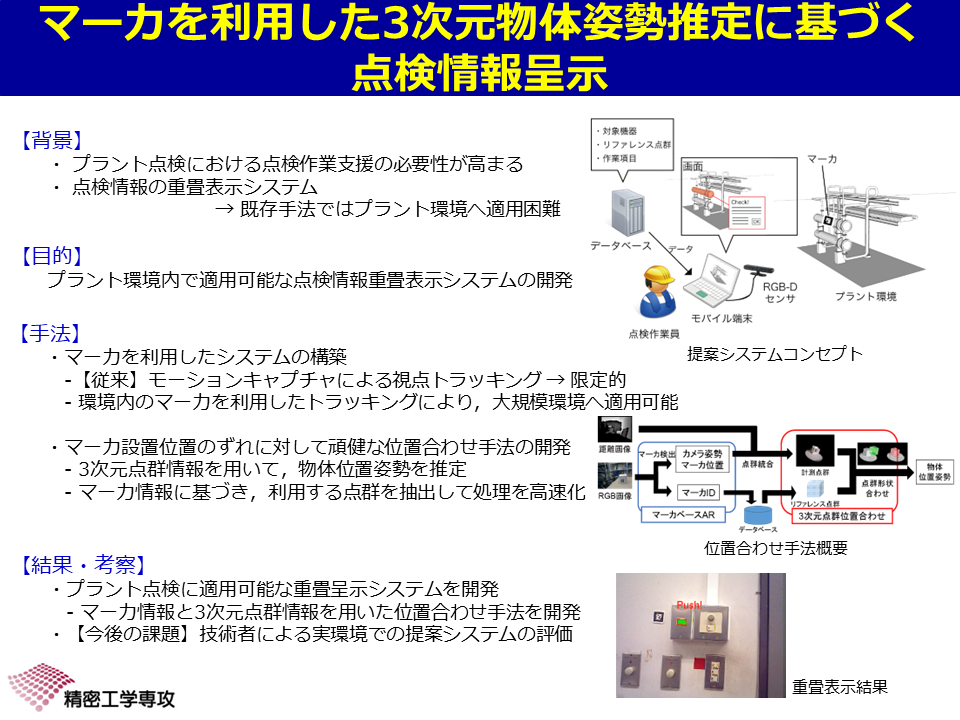
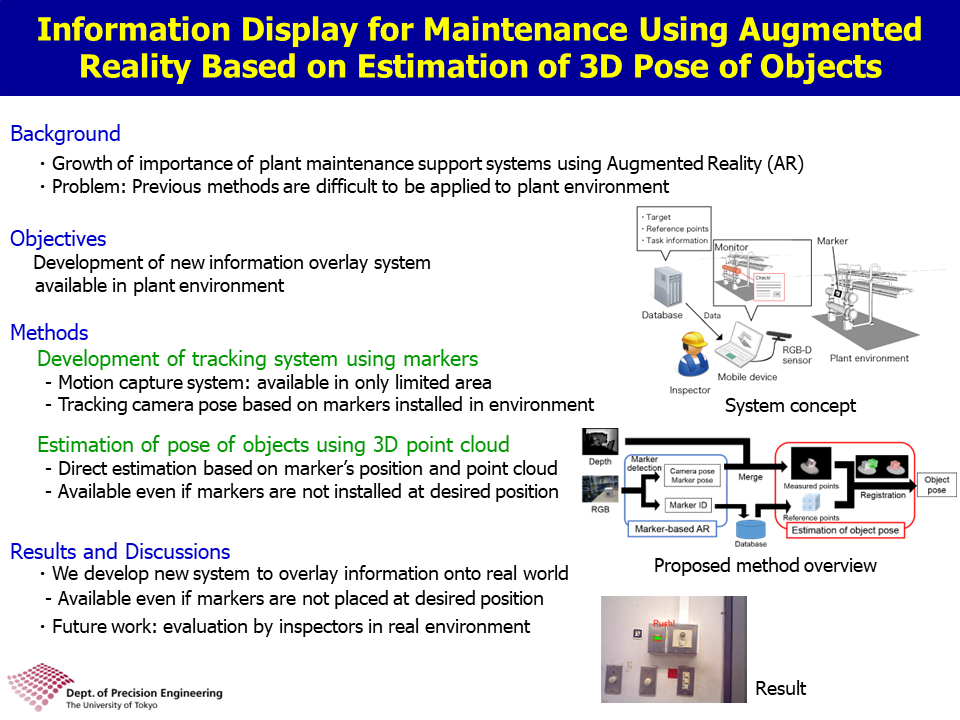
マーカを利用した3次元物体姿勢推定に基づく点検情報呈示 Information Display for Maintenance Using Augmented Reality Based on Estimation of 3D Pose of Objects |
就職 |
| 修士 | 柳井 香史朗 Koshiro Yanai |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2013年4月 ~ 2015年3月 |
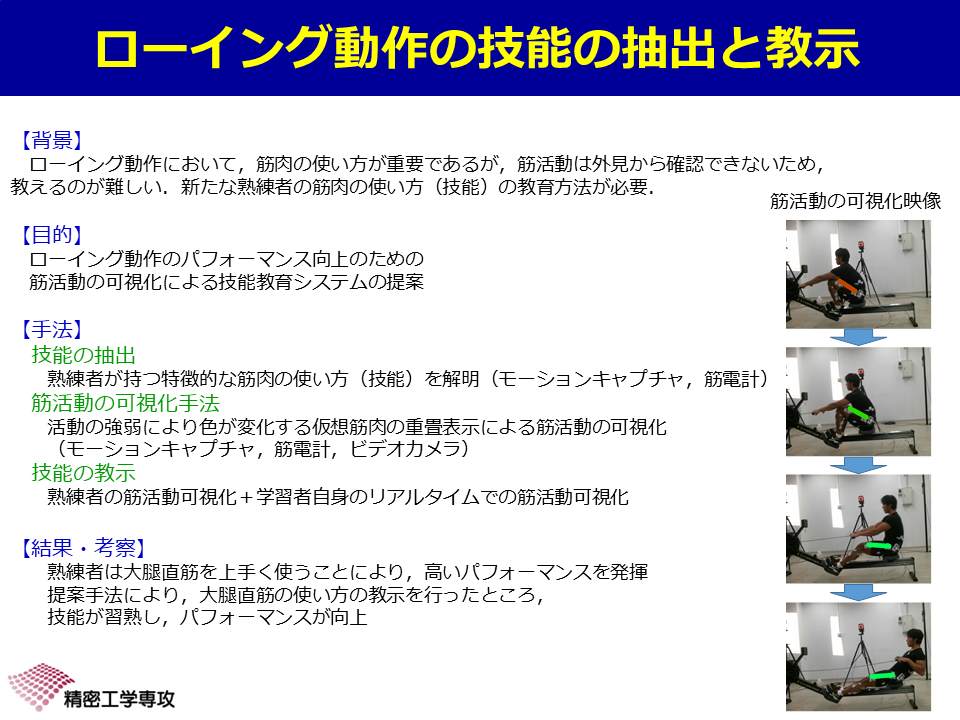
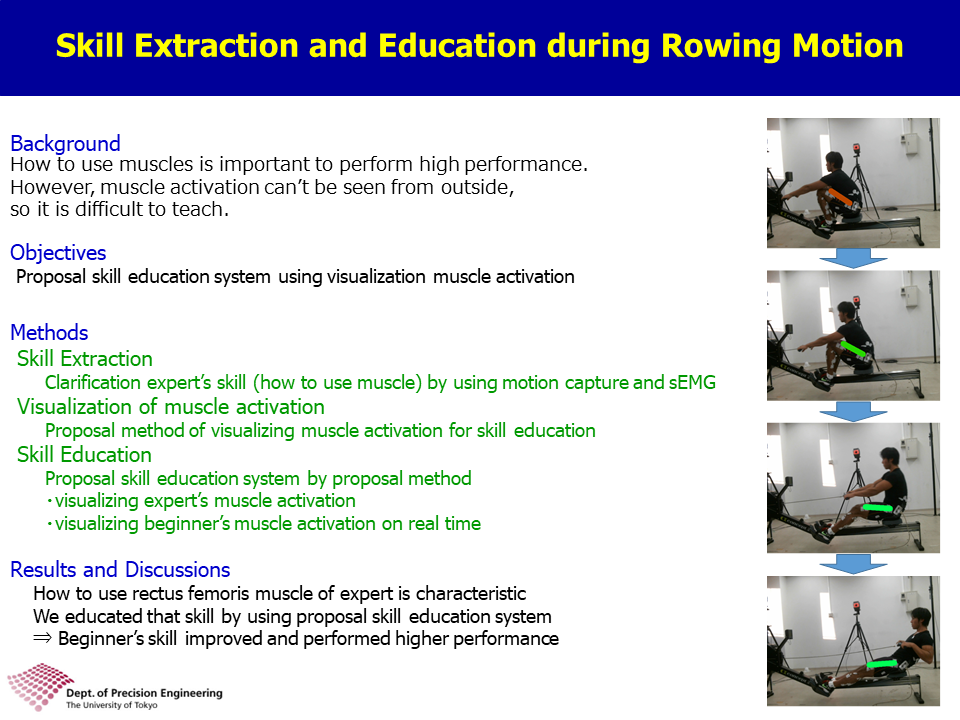
ローイング動作の技能の抽出と教示 Skill Extraction and Instraction during Rowing Motion |
就職 |
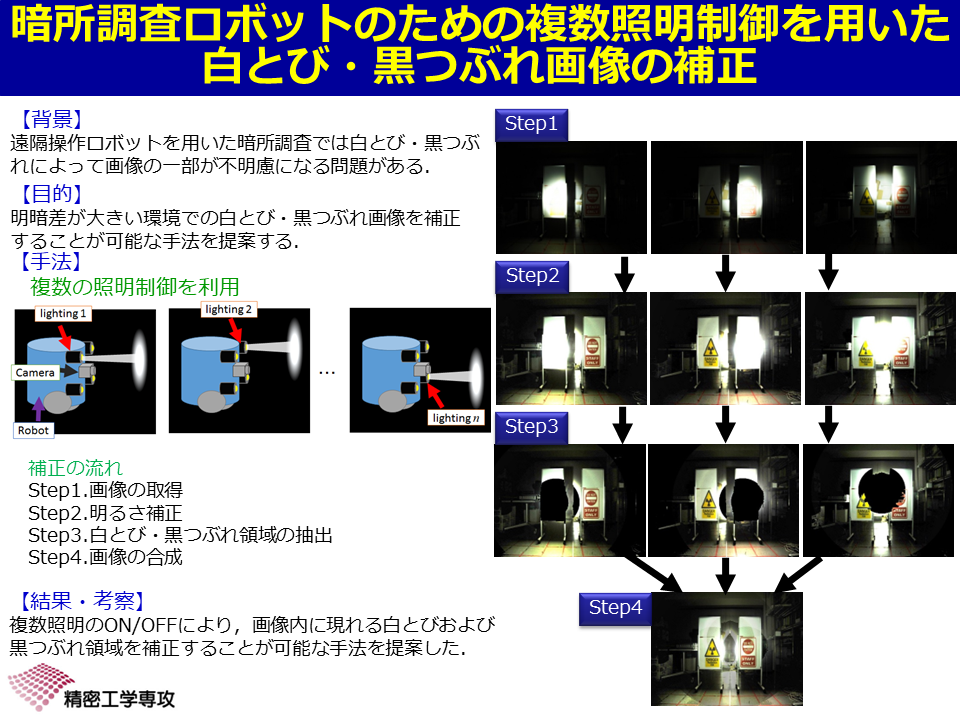
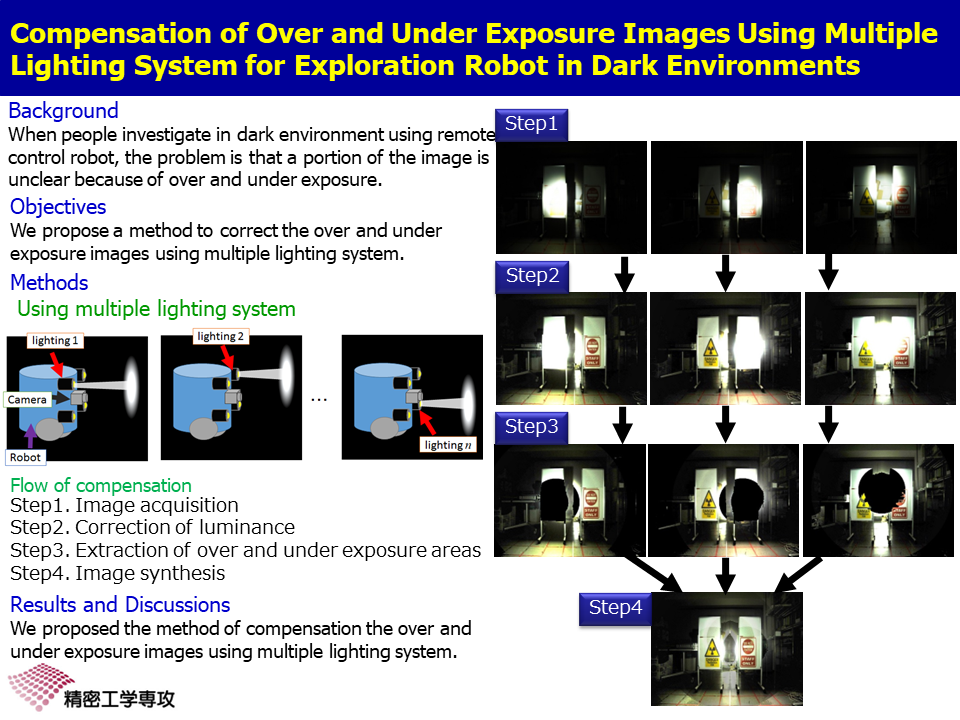
| 修士 | 林 鍾勲 Jonghoon Im |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2013年4月 ~ 2015年3月 |
暗所調査ロボットのための複数照明制御を用いた白とび・黒つぶれ画像の補正 Compensation of Over and Under Exposure Images Using Multiple Lighting System for Exploration Robot in Dark Environments |
博士進学 山下研 |
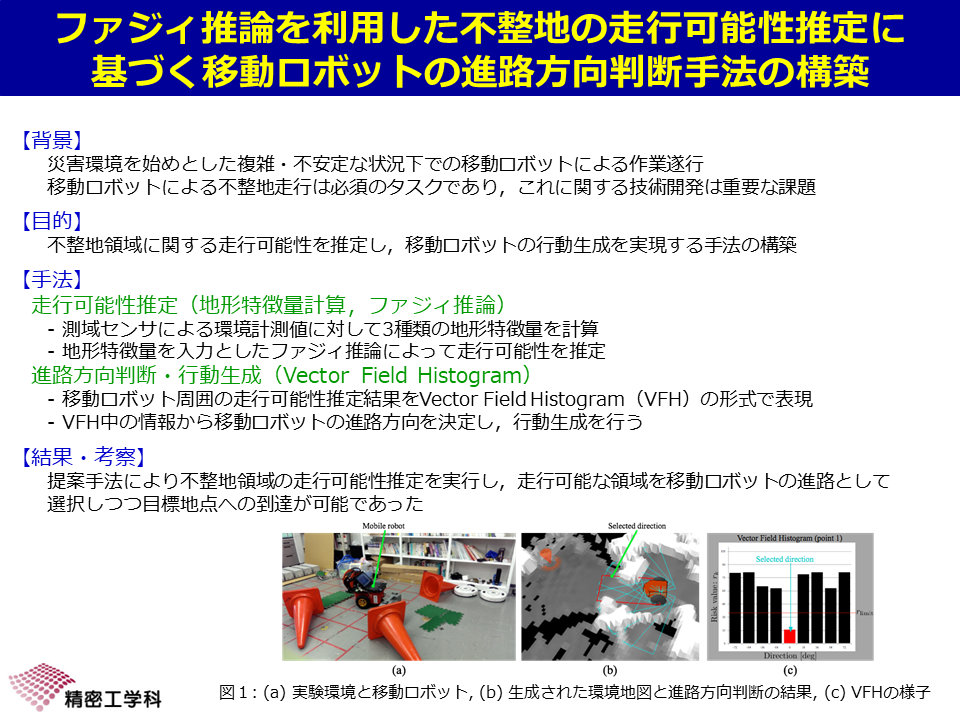
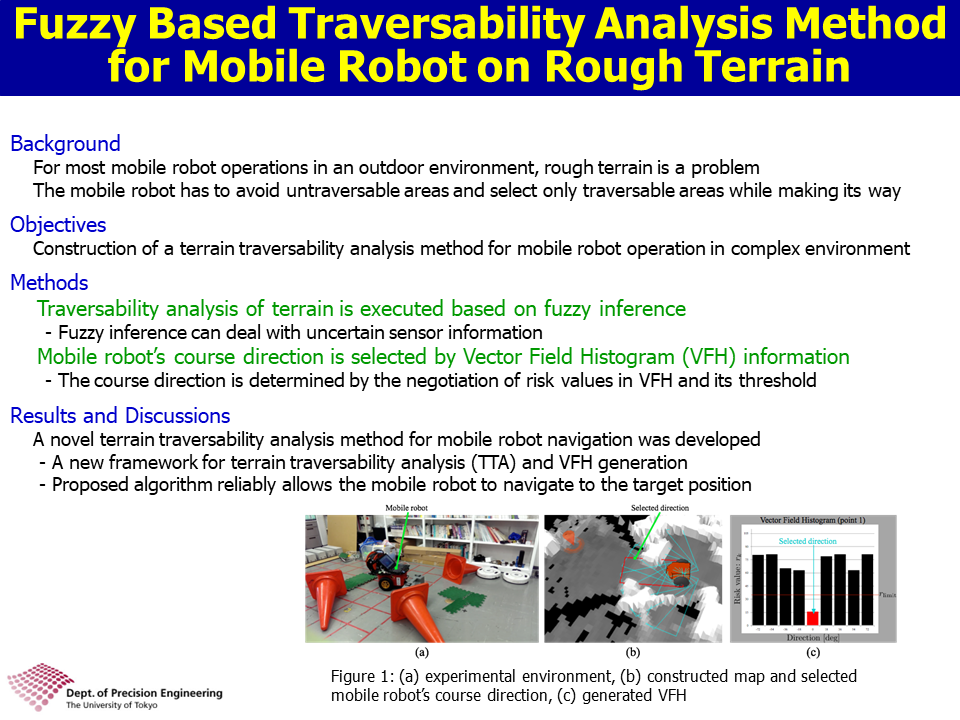
| 学部 | 田中 佑典 Yusuke Tanaka |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2014年4月 ~ 2015年3月 |
ファジィ推論を利用した不整地の走行可能性推定に基づく移動ロボットの進路方向判断手法の構築 Development of a Fuzzy Based Traversability Analysis Method for a Mobile Robot on Rough Terrain |
修士進学 山下研 |
| 学部 | 簑原 凜 Rin Minohara |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2014年4月 ~ 2015年3月 |
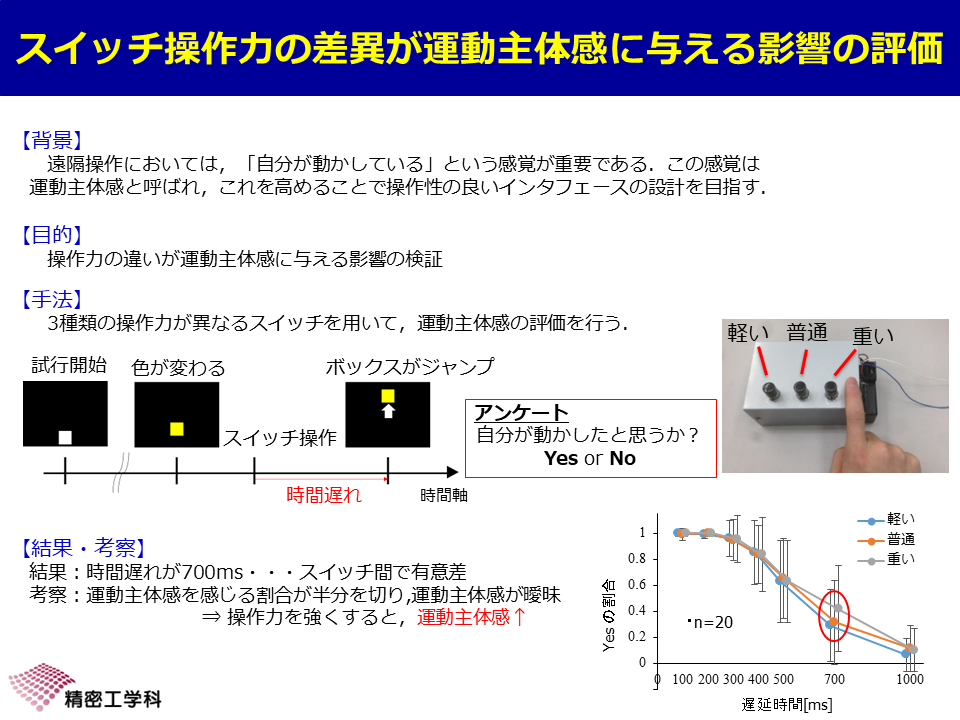
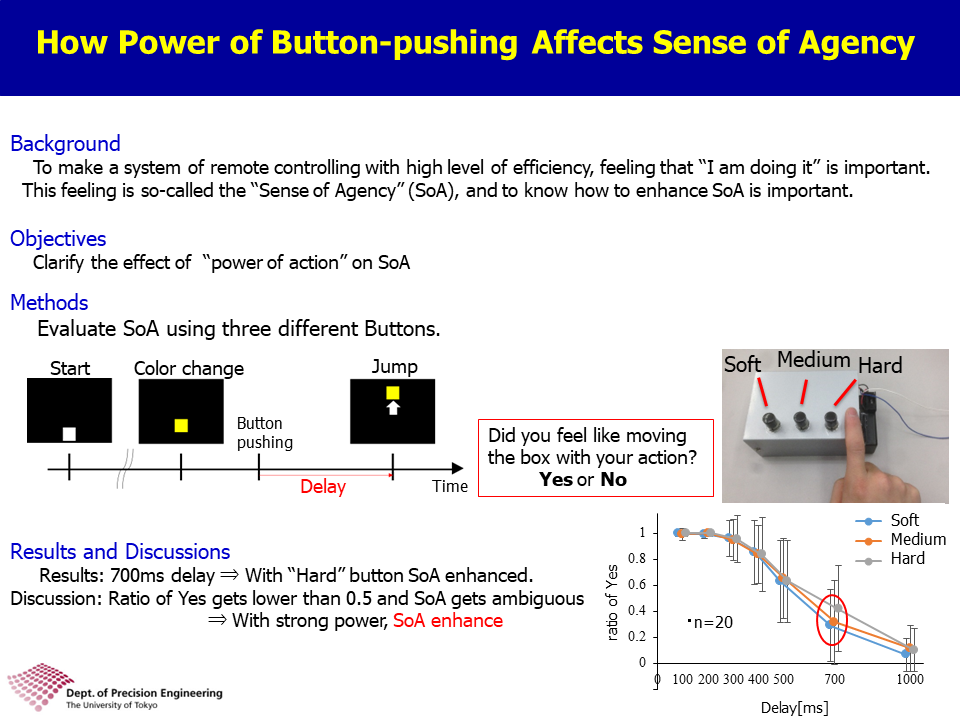
スイッチ操作力の差異が運動主体感に与える影響の評価 How Power of Button-pushing Affects Sense of Agency |
博士進学 淺間研 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 秘書 | 谷村 育子 Ikuko Tanimura |
 |
- | - | 2012年1月 ~ 2014年3月 |
- | - |
| 学部 2 |
久保 尭之 Takayuki Kubo |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2012年4月 ~ 2014年3月 |
魚眼ステレオカメラで取得したオーロラ動画の3次元計測と可視化 Three Dimensional Measurement and Visualization of Aurora Image Sequence Acquired with Fish-eye Stereo Camera |
就職 |
| 学部 3 |
岩滝 宗一郎 Soichiro Iwataki |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2013年4月 ~ 2014年3月 |
移動物体存在下での全方位カメラを用いたStructure from Motion Structure from Motion Using Omni-directional Camera in the Presence of Moving Objects |
修士進学 山下研 |
| 学部 4 |
久米 大将 Hiromasa Kume |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2013年4月 ~ 2014年3月 |
全方位カメラを用いた屈折の利用によるスケール復元が可能なStruture from Motion Scale Reconstrutable Structure from Motion Using Refraction with Omni-Directional Camera |
修士進学 高橋研 |
| 修士 | 佐藤 貴亮 Takaaki Sato |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
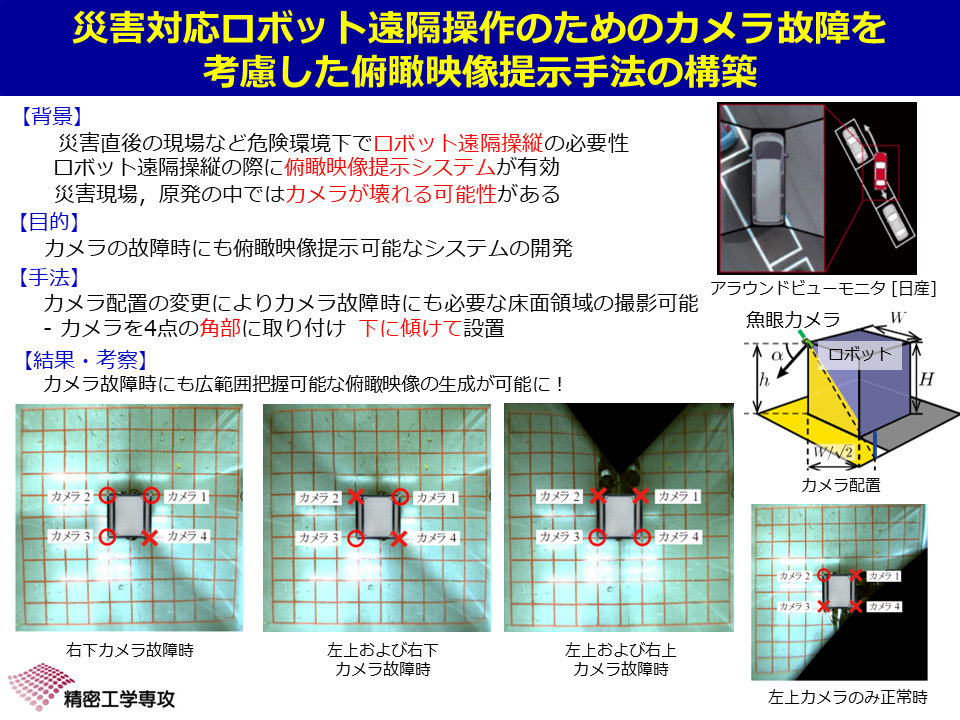
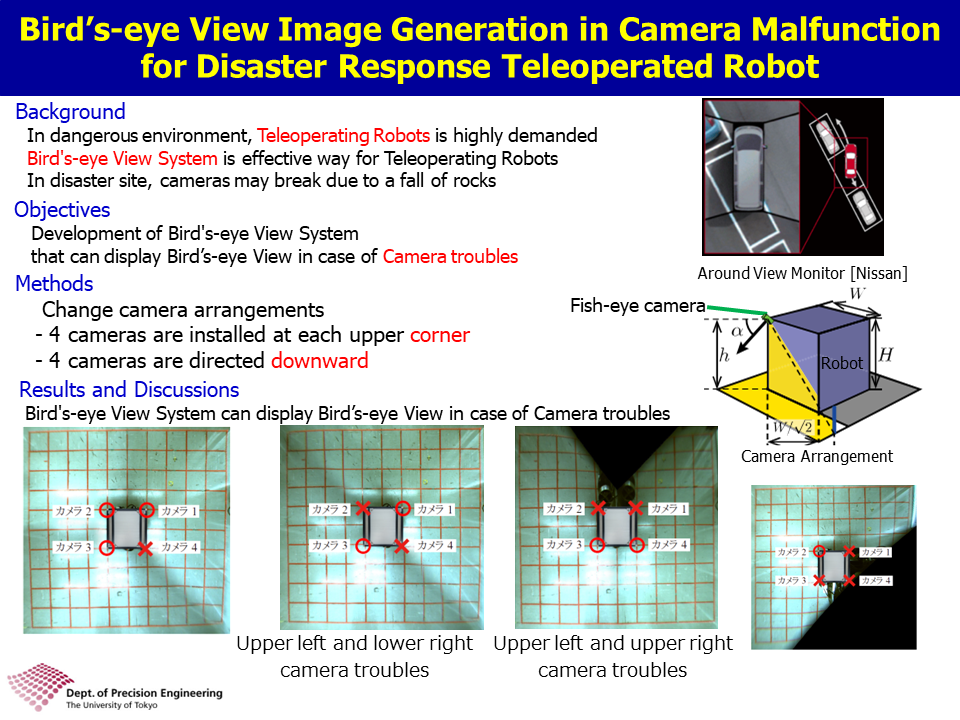
淺間 一 | 2012年4月 ~ 2014年3月 |
災害対応におけるロボット遠隔操作用俯瞰映像提示システムの開発 Development of Bird’s-eye View System for Robot Teleoperation in Disaster Response |
就職 |
| 修士 | 辻 琢真 Takuma Tsuji |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2012年4月 ~ 2014年3月 |
ラバーハンド錯覚における身体所有感に影響する知覚・運動要因の分析 Analysis of Perceptual and Kinetic Factor for Sense of Ownership in Rubber Hand Illusion |
就職 |
| 修士 | レ・クオク・ズン Le Quoc Dung |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2012年4月 ~ 2014年3月 |
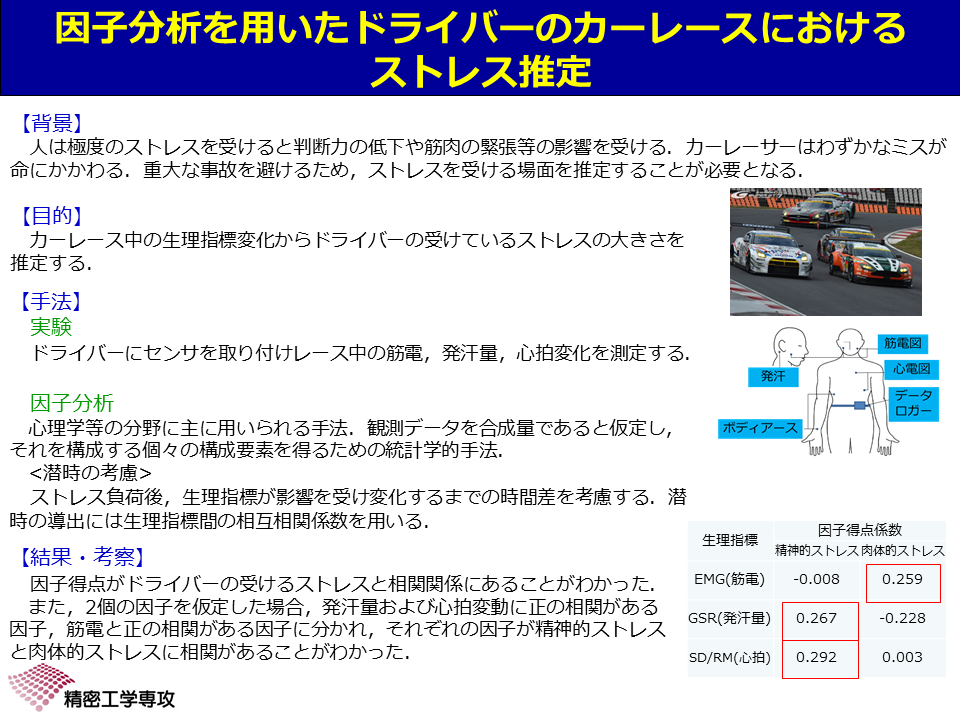
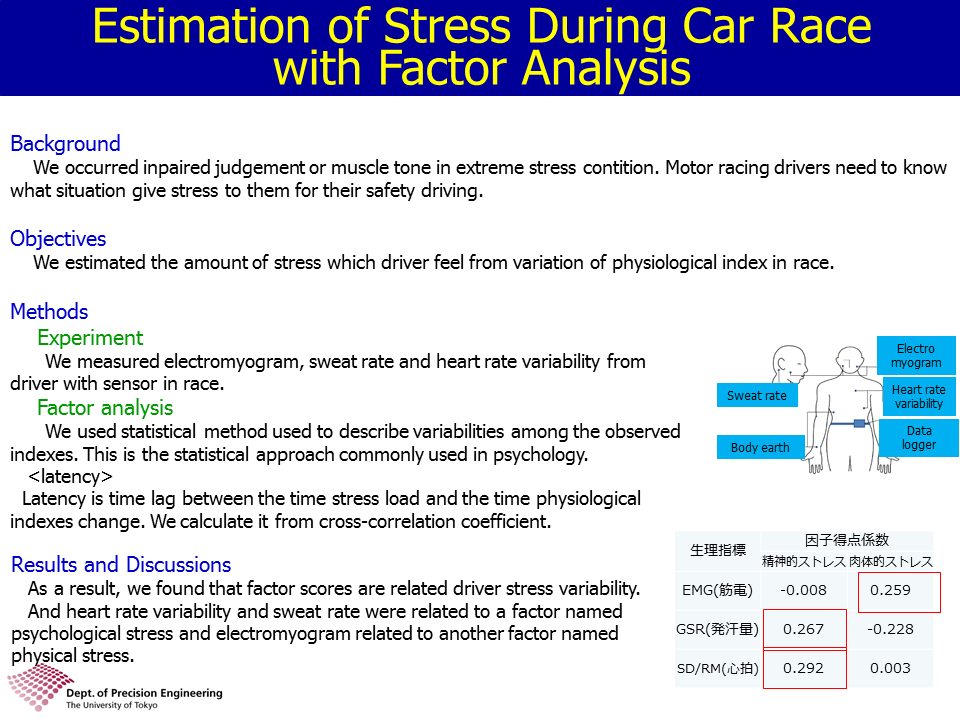
生理計測に基づくカーレーサーのストレス推定 Estimation of Stress on Car Racer using Physiological Measurements |
就職 |
| 学部 | 河野 通隆 Michitaka Kawano |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2013年4月 ~ 2014年3月 |
人間の移動軌跡予測に基づく経路生成を利用した移動ロボットの衝突回避 Collision Avoidance for Mobile Robot Using Path Generation Based on Prediction of Human Movement |
修士進学 金範埈研 |
| 学部 | 花谷 耕平 Kohei Hanatani |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2013年4月 ~ 2014年3月 |
膝関節実形状模型を用いたヒトの起立動作時の負荷計測 Stress Measurement during Human Stand-up Motion Using Accurate Shape Knee Joint Model |
修士進学 藤井研 |
| 学部 | 松本 倫実 Satomi Matsumoto |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2013年4月 ~ 2014年3月 |
聴覚刺激およびリズムの周期性が運動主体感に与える影響の評価 Evaluation of the Effect of Sound and Periodicity on Sense of Agency |
修士進学 藤井研 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 学部 1 |
坂本 一樹 Kazuki Sakamoto |
 |
東京大学 工学部 精密工学科 |
山下 淳 | 2012年4月 ~ 2013年3月 |
魚眼ステレオカメラとプロジェクタを用いた水中物体の3次元計測 3D Measurement of Underwater Objects Using Fisheye Stereo Camera and Projector |
修士進学 山下研 |
| 博士 | 増山 岳人 Gakuto Masuyama |
 |
東京大学大学院 工学系研究科 精密機械工学専攻 |
淺間 一 | 2008年10月 ~ 2013年3月 |
行動経験の変換不変性に基づく移動ロボットの行動学習 Reinforcement Learning Based on Transformation Invariance of Experience for Mobile Robot Control Problem |
中央大学 梅田研 助教 現・名城大学 准教授 |
| 博士 | 李 光輝 Guanghui Li |
 |
東京大学大学院 工学系研究科 精密機械工学専攻 |
淺間 一 | 2010年4月 ~ 2013年3月 (満期修了) |
動的環境における複数案内ロボットの作業分担決定と経路計画 Distributed Task Allocation and Path Planning in Dynamic Environment for Multi-robot Guidance System (2014年9月博士取得) |
就職 |
| 修士 | 石川 雄己 Yuki Ishikawa |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2011年4月 ~ 2013年3月 |
ヒトの三次元筋骨格靭帯膝関節動態のモデル構築と解析 Construction Model and Analysis Three-dimensional Musculoskeletal Ligament Knee Movement |
博士進学 淺間研 |
| 修士 | 加藤 利哉 Toshiya Kato |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2011年4月 ~ 2013年3月 |
リスクを考慮した屋内における避難誘導路計画 Construction of Evacuation Routes on a Building with Taking Account of Risk |
就職 |
| 修士 | 熊原 渉 Wataru Kumahara |
 |
東京大学大学院 工学系研究科 精密工学専攻 |
淺間 一 | 2011年4月 ~ 2013年3月 |
未知環境下における歩行者流を利用した移動ロボットナビゲーション Mobile Robot Navigation based on Pedestrians' Flow in Unknown Environment |
就職 |
| 学部 | 伊部 直樹 Naoki Ibe |
|
東京大学 工学部 精密工学科 |
淺間 一 | 2012年4月 ~ 2013年3月 |
歩行者の意図推定に基づいたロボットの譲道行動の生成 Development of Robot Model Generating Give-way Behavior based on Estimation of Pedestrian Intention |
修士進学 淺間研 |
| 学部 | 中川 純希 Junki Nakagawa |
|
東京大学 工学部 精密工学科 |
淺間 一 | 2012年4月 ~ 2013年3月 |
ダーツ投擲時における上肢・下肢の協調の解析 Analysis of Arm-Leg Coordination in Human Throwing Darts Motion |
修士進学 山下研 |
| 種別 | 氏名 | 写真 | 所属 | 指導教員 受入教員 |
在籍期間 | 研究テーマ | 進路 |
| 修士 | 寺田 善貴 Yoshitaka Terada |
 |
東京大学大学院 工学系研究科 精密機械工学専攻 |
淺間 一 | 2010年4月 ~ 2012年3月 |
移動ロボットの軌道生成のためのすれ違いにおける歩行者の行動パターンのモデル化 Modeling Behavior Patterns of Pedestrian for Path Planning of Mobile Robots |
就職 |
| 修士 | 濱崎 峻資 Shunsuke Hamasaki |
 |
東京大学大学院 工学系研究科 精密機械工学専攻 |
淺間 一 | 2010年4月 ~ 2012年3月 |
環境に対応した人間の移動経路予測を用いた移動ロボットの人物回避 Collision Avoidance of Mobile Robot with Prediction of Human's Movement |
進学準備 |
| 修士 | 成 アンナ Anna Sung |
 |
東京大学大学院 工学系研究科 精密機械工学専攻 |
淺間 一 | 2010年4月 ~ 2012年3月 |
生理指標を用いたサービスに対する不満状態の推定 Estimation of Dissatisfaction with Service by Physiological Measures |
就職 |
| 学部 | 山口 祐樹 Yuki Yamaguchi |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2011年4月 ~ 2012年3月 |
人追従を利用した移動ロボットのナビゲーション Navigation of Mobile Robot Following Pedestrians |
修士進学 高橋研 |
| 学部 | レー・フック・ダイ Le Phuoc Dai |
 |
東京大学 工学部 精密工学科 |
淺間 一 | 2011年4月 ~ 2012年3月 |
意図を考慮した歩行者モデルの開発 Development of Pedestrian's Behavior Model Considering His/Her Intention |
就職 |
2011年度以前(静岡大学)はこちら


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}