 .
.
新井民夫のHomemadeへようこそ.同時にここは研究室のHome pageでもあります.知りたい内容で左側のFrameで行き先を選択してください.人気があるのは,「配偶者の選び方」です.
新井研究室で研究をしたい人は、To Who wants to join Arai Lab にどうぞ。
産学連携を希望される方は、 Research に情報があります。
生産自動化専門委員会、生産学術連合会議、自動化推進協会はSocietyです。
まずは顔写真から.5年分を示しておけば、写真が本人を本当にあらわしているとだとわかるでしょう。
 |
 |
|
|
|
研 究 分 野
ロボット言語の開発・標準化,ロボットとクレーンの協調制御,複数の柔らかいマニピュレータの協調制御,複数台の移動ロボットの動作計画,ロボットの環境設計,距離画像,作業技能,RoboCupなどのの研究に従事.2000年からの10年間はサービス工学を推進.
ここ数年の専門は,次の4つです.
 |
||
 |
研 究 業 績
発表論文はCIRP,日本ロボット学会誌,精密工学会誌,日本機械学会誌, IEEE Transaction of Robots and Automation, Journal of Robotics and Autonomous Systemsなどに発表しています.
年度別の研究業績は研究室を参照してください。
主要論文
| 1947 | 東京都に生まれる | |
| 1960 | 東京都文京区立誠之小学校 卒業 | |
| 1963 | 私立 開成中学校 卒業 | |
| 1966 | 私立 開成高等学校 卒業 | |
| 1970 | 東京大学工学部精密機械工学科 卒業. | |
| 1972 | 東京大学工学系大学院精密機械工学課程修士課程修了.工学修士. | |
| 1977 | 東京大学工学系大学院精密機械工学課程博士課程修了. 「自動組立の研究」で工学博士. |
|
| 1977 | 東京大学工学部 講師 精密機械工学科 精密機械製造学講座(木下夏夫教授) | |
| 1979 | 東京大学工学部 助教授 精密機械工学科 精密機械製造学講座(木下夏夫教授) | |
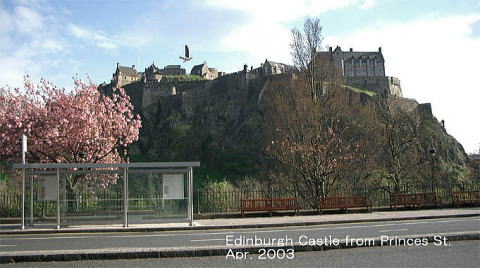
| 1979 | 〜81年英国エディンバラ大学人工知能学科客員研究員 (Robin Popplestone 教授) | |
| 1983 | 〜86年 東京大学工学部総合試験所機械方面研究室助教授 | |
| 1987 | 東京大学工学系研究科精密機械工学専攻教授 | |
| 2000 | 〜2005年 東京大学人工物工学研究センター長 併任 | |
| 2012 | 3月 定年退職 |
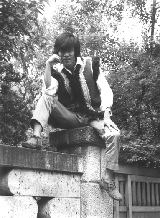
| このページの目的は,私の全体像をつかんでいただくこと,そこで写真をもう2つ.大学4年の夏と10年ほど前です.この間に4半世紀の時が流れています. | |
 |
 |
| 新井民夫 1969年 アフガンチョッキを着て (撮影:井上 明) |
新井民夫 1994年 |
| Keywords: Robot Mobile Multiple Cooperation Coordination Service Robots Home Robots
Assembly Automatic assembly Insertion Peg-and-Hole Peg-in-Hole Production
Manufacturing Holon Holonic System Plug-and-Produce Cleaning Sweeping Planning
Local Communication Group Force control Compliance control Handling Manipulation
Graspless manipulation Releasing Release Pivoting Tumbling Transportation
Feeding Crane Metamorphic Material Handling System MMHS IMS Service Engineering
SEFORUM キーワード: ロボット 移動 複数 協調 制御 サービスロボット ホームロボット 組立 自動組立 挿入 丸棒丸穴 生産システム ホロン ホロニック システム プラグ アンド プロデュース 清掃 掃除 計画 局所 通信 線形制御 群 マルチ 力制御 ハンドリング マニピュレーション リリース ピボット タンブリング 搬送 クレーン 変態型 メタモルフィック IMS サービス工学 |
| 連絡先 |  |
||
 |
|||
| Edinburgh大学は1979年から家族で2ヵ年滞在しました.綺麗な街でした.その後,何度もよっています. |
|||
| 世間に発信したい情報をサイトマップから選択してください. |