 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
| 椅子に座るG1 | 歩くG1 | 手を振るG1 |
 |
 |
| 移動マニピュレータ | 手先にセンサ搭載バージョン |
 |
 |
 |
| マニピュレータ1 | マニピュレータ2 | マニピュレータ3 |
 |
 |
| Spot | 不整地走行中のSpot |
 |
 |
 |
| Go1(前から見た様子) | Go1(後ろから見た様子) | Spot(手前)とGo1(奥) |
 |
 |
 |
 |
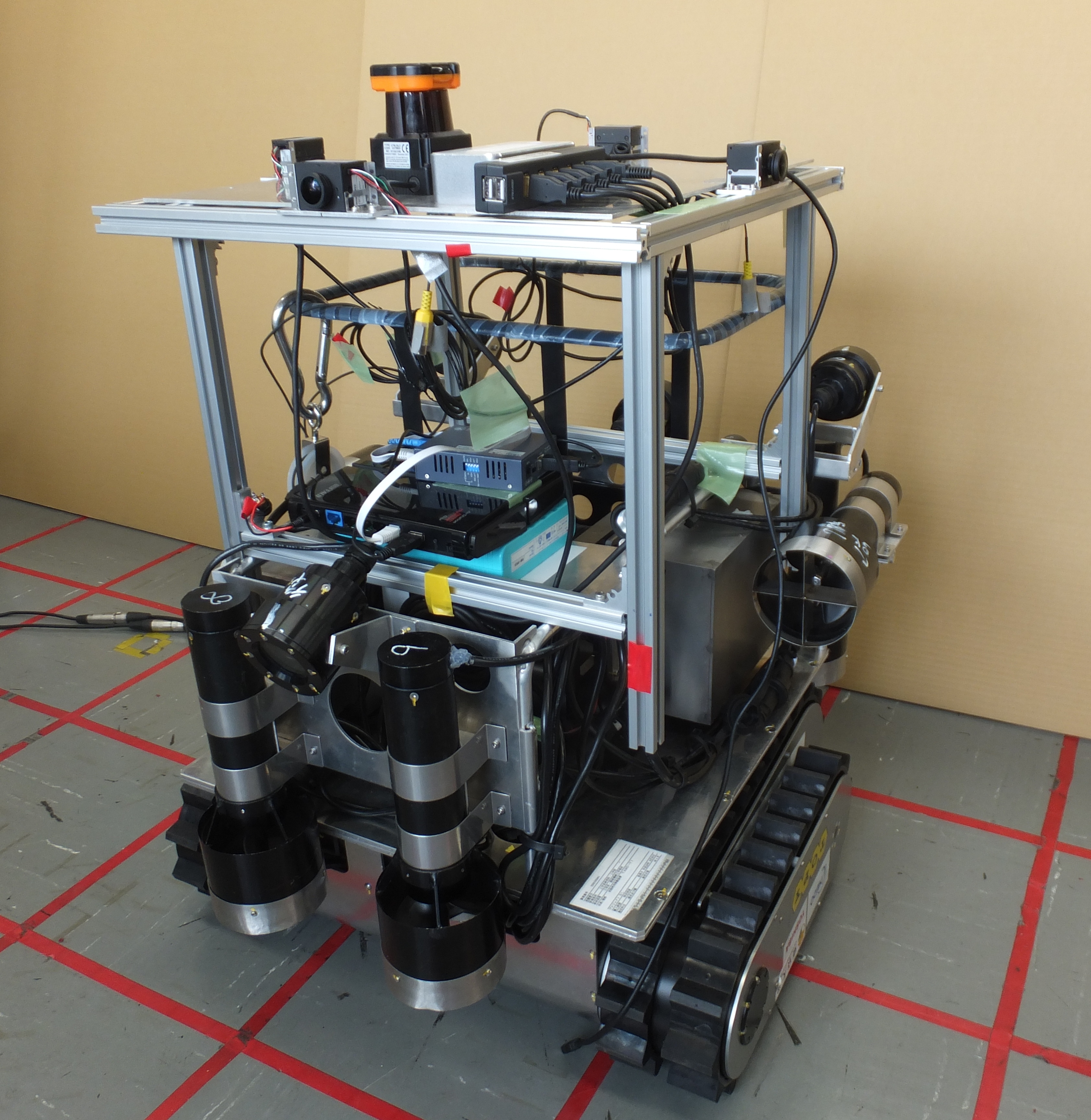
| 水陸両用移動ロボット | 水中作業の様子1 | 水中作業の様子2 | 俯瞰映像対応型 |
 |
 |
| JACKAL GPS・LiDAR・カメラ搭載 |
Spot(左)とJACKAL(右) |
 |
 |
 |
| DJI Matrice 300 RTK(2台あります) | Pioneerから離着陸するドローン(イメージ図) | 2台のドローン |
 |
 |
| 移動マニピュレータ | パイプ点検の様子 |
 |
 |
 |
 |
 |
| 全方位カメラ搭載Pioneer | 2台のPioneer(センサ類未搭載バージョン) | LRF搭載Pioneer | 暗所探査仕様Pioneer | Kinect搭載Pioneer |
 |
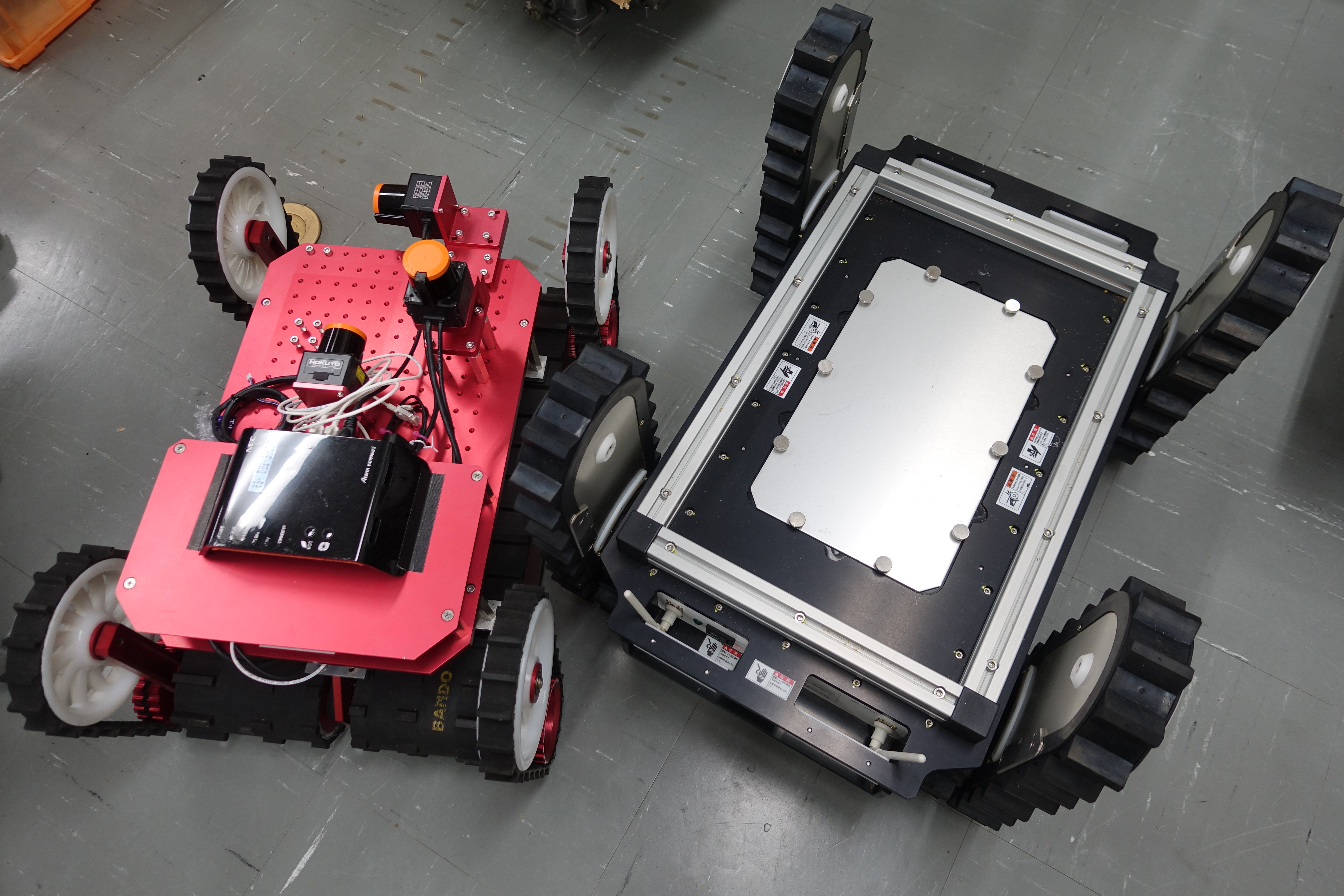 |
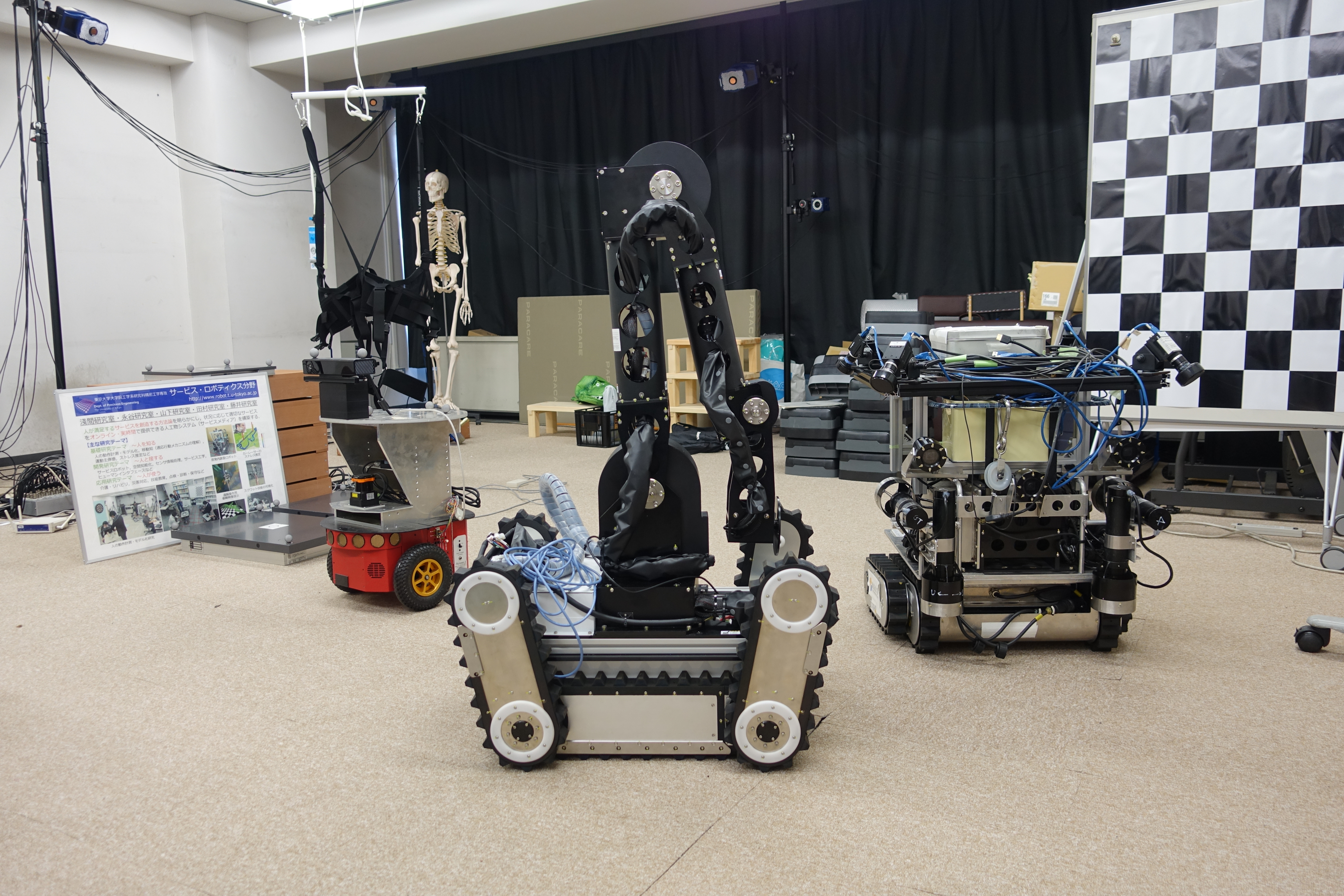
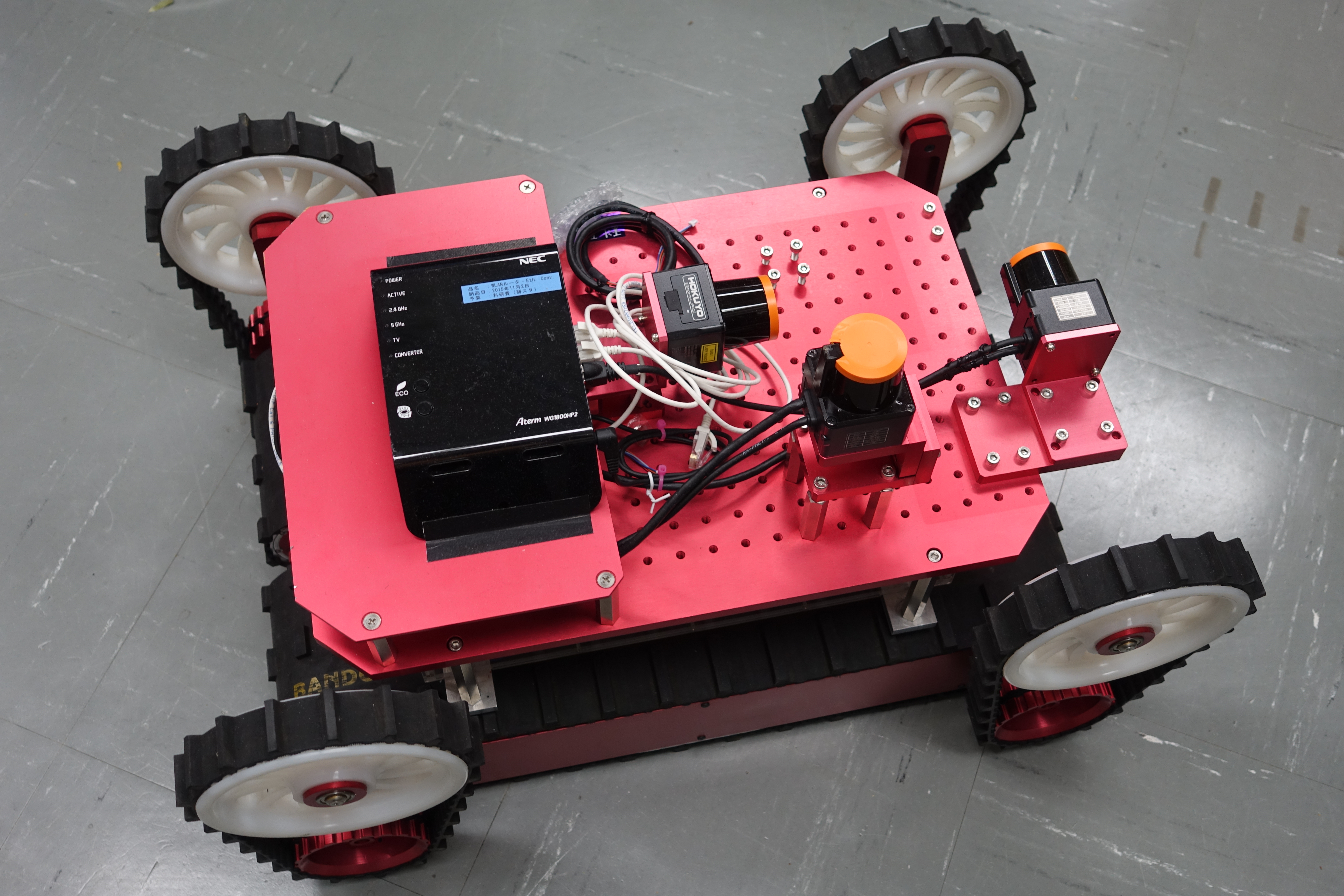
| 赤いロボット | 赤いロボットと銀色のロボット |
 |
 |
 |
| 物体操作仕様ZEN | ステレオカメラ仕様ZEN | 遠隔操作仕様ZEN |
 |
| 4台のAIBO |
 |
| DARwIn-OP |
 |
| ステレオカメラ搭載e-nuvo WALK |
 |
| 2台のRoomba |
 |
 |
| VIVID9iと台座 | VIVID9i本体 |
 |
 |
 |
 |
| モーションキャプチャ全体図 | カメラ拡大図 | 骨格模型 | 床反力計 |
 |
 |
 |
 |
| 研究室の一眼レフカメラたち1 | 研究室の一眼レフカメラたち2 | 全方位カメラ | 魚眼ステレオカメラ |
 |
 |
| 大三元レンズを装着したZ7II | 大三元レンズとZ 50mm f/1.2 S |
 |
 |
 |
| 脳波計測システム | 計測の様子(後ろから) | 計測の様子(前から) |
| EMR-AT VOXER |
 |
 |
 |
| Velodyne製LiDARその1 | Velodyne製LiDARその2 | レーザ式測域センサTOP-URG |
 |
| RGB-Dセンサ(Kinect) |
 |
 |
 |
| 3Dプリンタその1 | 3Dプリンタその2 | 3Dプリンタその3 |