 |
 |
|
| オーロラ画像1 | オーロラ画像2 |
 |
 |
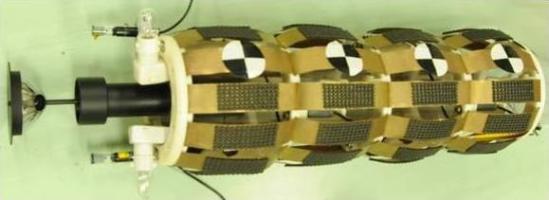
| レーザ搭載移動ロボット(初号機) | レーザ搭載移動ロボット(2号機) |
 |
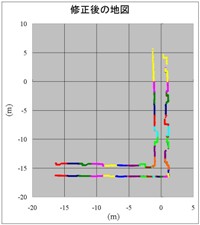 |
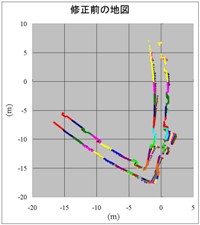
| 修正前の地図 | 修正後の地図 |
 |
 |
 |
| 単眼初号機ロボット | 単眼2号機ロボット | ステレオ初号機ロボット |
 |
| ミミズ初号機ロボット(中央大中村太郎准教授と共同研究) |
 |
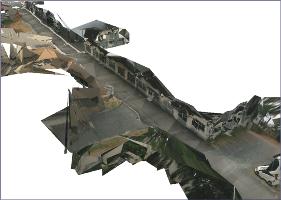 |
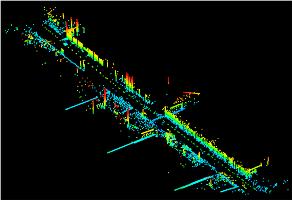
| 屋外環境計測結果 | テクスチャマッピング結果 |
 |
 |
| ウェアラブルビジョンシステム | タッチパネル上での誘導 |
 |
|
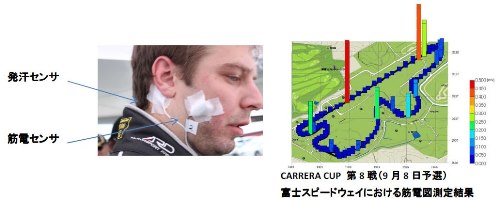
| カーレーサーの計測 (http://www.gsport.co.jp/img/pdf/press_releases20121120.pdfより抜粋) |
 |
 |
 |
|
| 動作の計測 | 筋肉の動き | 可視化 |
 |
|
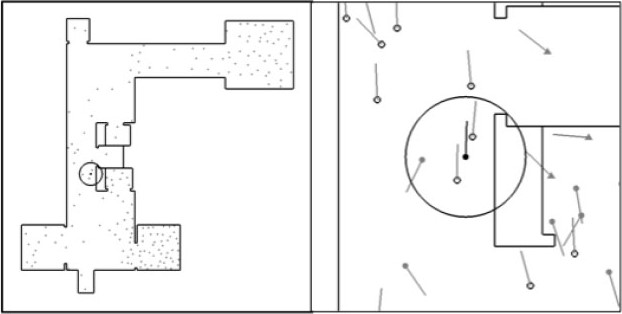
| 歩行者の行動のモデル化:狭い場所で道を譲る行動の発現 |
 |
|
| 移動ロボットのナビゲーション 左図:ロボットが移動している様子.右図:ロボット周囲の拡大図 |
 |
 |
 |
|
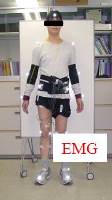
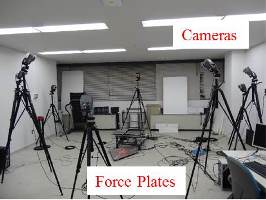
| 人間動作の計測 | 人間動作の計測装置 | 人間動作の解析シミュレーション |
 |
|
| ラバーハンド錯覚 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}