 |
 |
 |
|
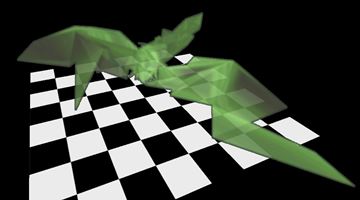
| オーロラ画像1 | オーロラ画像2 | 3次元計測・可視化結果 |
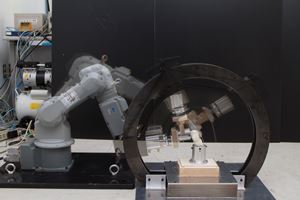
Ryuho Kataoka, Yoshizumi Miyoshi, Kai Shigematsu, Donald Hampton, Yoshiki Mori, Takayuki Kubo, Atsushi Yamashita, Masayuki Tanaka, Toshiyuki Takahei, Taro Nakai, Hiroko Miyahara and Kazuo Shiokawa: "Stereoscopic Determination of All-sky Altitude Map of Aurora Using Two Ground-based Nikon DSLR Cameras", Annales Geophysicae, Vol.31, No.9, pp.1543-1548, September 2013. [doi:10.5194/angeo-31-1543-2013]
Yoshiki Mori, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Toru Kaneko, Masatoshi Okutomi and Hajime Asama: "Calibration of Fish-Eye Stereo Camera for Aurora Observation", Proceedings of the International Workshop on Advanced Image Technology 2013 (IWAIT2013), pp.729-734, Nagoya (Japan), January 2013. (Candidate for Best Paper Award) [PDF]
Akira Takeuchi, Hiromitsu Fujii, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Masatoshi Okutomi and Hajime Asama: "3D Visualization of Aurora from Optional Viewpoint at Optional Time", Proceedings of ACM SIGGRAPH Asia 2015 Posters, Article No.9, Kobe (Japan), November 2015. [PDF] [Movie] [doi:10.1145/2820926.2820967]
久保 尭之, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "魚眼ステレオカメラを用いたオーロラの3次元計測と可視化", 第14回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2013), pp.1111-1114, 神戸, December 2013.(SI2013優秀講演賞 受賞) [PDF]
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "オーロラの3次元計測のための形状変化を考慮した特徴点追跡", 第20回ロボティクスシンポジア講演予稿集, pp.18-24, 軽井沢, March 2015.(査読付) [PDF]
Yoshiki Mori, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Toru Kaneko, Masatoshi Okutomi: "Calibration of Fish-Eye Stereo Camera for Aurora Observation", International Workshop on Advanced Image Technology 2013 (IWAIT2013), Nominated as Candidates for IWAIT2013 Best Paper Award, 2013年1月8日. [IWAIT2013HP]
久保 尭之, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "魚眼ステレオカメラを用いたオーロラの3次元計測と可視化", 第14回計測自動制御学会システムインテグレーション部門講演会(SI2013), SI2013優秀講演賞, 2013年12月20日. [賞状]
 |
 |
| 竹内 彰 2014年度学部卒 2016年度修士了予定 |
久保 尭之 2013年度学部卒 |
 |
 |
|
| 前後左右方向にカメラを取り付けた全方向移動ロボット | 左図:4台のカメラの映像.右図:生成した俯瞰画像 |
 |
 |
|
| NEDOプロジェクトで開発した水陸両用移動ロボット | 移動ロボットの遠隔操作画面(東芝と共同開発) |
 |
 |
 |
 |
|
| 水陸両用移動ロボット | 遠隔操作画面 | 4台のカメラの映像 | 生成した俯瞰画像 |
佐藤 貴亮, 藤井 浩光, Alessandro Moro, 杉本 和也, 野末 晃, 三村 洋一, 小幡 克実, 山下 淳, 淺間 一: "無人化施工用俯瞰映像提示システムの開発", 日本機械学会論文集, Vol.81, No.823, 14-00031, pp.1-13, March 2015. [PDF] [doi:/10.1299/transjsme.14-00031]
小松 廉, 藤井 浩光, 山下 淳, 淺間 一: "カメラ配置設計による故障時に備えたロボット遠隔操作のための俯瞰映像提示システムの開発", 精密工学会誌, Vol.81, No.12, pp.1206-1212, December 2015. [PDF] [doi:10.2493/jjspe.81.1206]
Takaaki Sato, Alessandro Moro, Atsushi Sugahara, Tsuyoshi Tasaki, Atsushi Yamashita and Hajime Asama: "Spatio-Temporal Bird's-Eye View Images Using Multiple Fish-eye Cameras", Proceedings of the 2013 IEEE/SICE International Symposium on System Integration (SII2013), pp.753-758, Kobe (Japan), December 2013. [PDF]
佐藤 貴亮, Alessandro Moro, 山下 淳, 淺間 一: "複数の魚眼カメラの時空間データによる全方位俯瞰画像生成", 第18回ロボティクスシンポジア講演予稿集, pp.367-372, 山形, March 2013.(査読付) [PDF]
岩滝 宗一郎, 藤井 浩光, Alessandro Moro, 山下 淳, 淺間 一, 吉灘 裕: "建設機械遠隔操作のための周囲カメラ映像および作業部カメラ映像統合による任意視点映像提示", 第20回ロボティクスシンポジア講演予稿集, pp.321-327, 軽井沢, March 2015.(査読付) [PDF]
佐藤 貴亮, Alessandro Moro, 山下 淳, 淺間 一: "複数の魚眼カメラとLRFを用いた重畳型全方位俯瞰画像提示手法の構築", 第13回計測自動制御学会システムインテグレーション部門講演会(SI2012), SI2012優秀講演, 2012年12月20日. [賞状]
 |
 |
 |
 |
| 岩滝 宗一郎 2013年度学部卒 2015年度修士了予定 |
小松 廉 2015年度修士了予定 |
林 鐘勳 2014年度修士了 2017年度博士了予定 |
佐藤 貴亮 2013年度修士了 |
 |
 |
| レーザ搭載移動ロボット(初号機) | レーザ搭載移動ロボット(2号機) |
 |
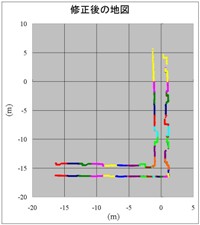 |
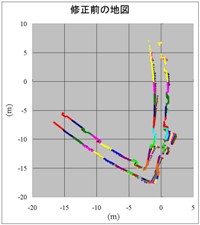
| 修正前の地図 | 修正後の地図 |
Masashi Awai, Atsushi Yamashita, Takahito Shimizu, Toru Kaneko, Yuichi Kobayashi and Hajime Asama: "Development of Mobile Robot System Equipped with Camera and Laser Range Finder Realizing HOG-Based Person Following and Autonomous Returning", Journal of Robotics and Mechatronics, Vol.26, No.1, pp.68-77, February 2014. [Link]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "RGB-D SLAM Using Vanishing Point and Door Plate Information in Corridor Environment", Intelligent Service Robotics, Vol.8, No.2, pp.105-114, April 2015. [PDF] [doi:10.1007/s11370-015-0166-1]
田中 佑典, 池 勇勳, 山下 淳, 淺間 一: "移動ロボットの性能に応じた走行可能性推定が可能な不整地に対する走行可能性推定および行動生成手法", 精密工学会誌, Vol.81, No.12, pp.1119-1126, December 2015. [PDF] [doi:10.2493/jjspe.81.1119]
Yusuke Tanaka, Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Fuzzy Based Traversability Analysis for a Mobile Robot on Rough Terrain", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp.3965-3970, Seattle (USA), May 2015. [PDF] [Movie] [bibtex]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Automatic Calibration and Trajectory Reconstruction of Mobile Robot in Camera Sensor Network", Proceedings of the 11th Annual IEEE International Conference on Automation Science and Engineering (CASE2015), pp.206-211, Gothenburg (Sweden), August 2015. [PDF]
朝倉 弘崇(指導学生 修士2年), 精密工学会画像応用技術専門委員会・映像情報メディア学会メディア工学研究会委員会 合同サマーセミナー2004 優秀発表賞 受賞, 2004年8月20日. [賞状]
池 勇勳(指導学生 博士2年), 2014年度計測自動制御学会学術奨励賞研究奨励賞 受賞, 2015年2月20日. [賞状] [賞状と楯]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Automatic Camera Pose Estimation Based on Textured 3D Map Information", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
 |
 |
 |
| 池 勇勳 2015年度博士了予定 |
田中 佑典 2014年度学部卒 2016年度修士了予定 |
河野 通隆 2013年度学部卒 |
 |
 |
 |
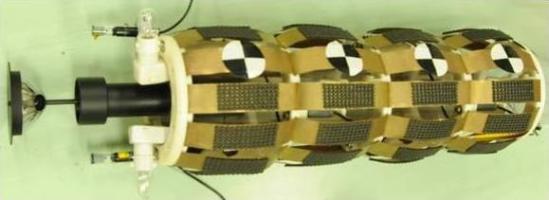 |
| 単眼初号機ロボット | 単眼2号機ロボット | ステレオ初号機ロボット | ミミズ初号機ロボット (中央大学中村太郎研究室と共同研究) |
 |
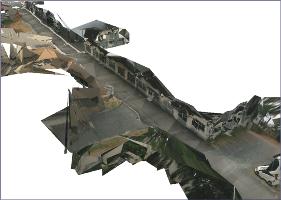 |
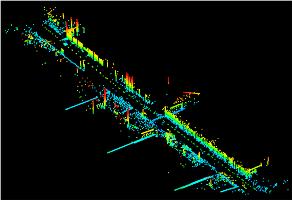
| 屋外環境計測結果 | テクスチャマッピング結果 |
Ryosuke Kawanishi, Atsushi Yamashita, Toru Kaneko and Hajime Asama: "Parallel Line-based Structure from Motion by Using Omnidirectional Camera in Textureless Scene", Advanced Robotics, Vol.27, No.1, pp.19-32, January 2013.(FA財団論文賞受賞) [PDF] [bibtex] [doi:10.1080/01691864.2013.751160]
Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko: "Construction of 3D Environment Model from an Omni-Directional Image Sequence", Proceedings of the 3rd Asia International Symposium on Mechatronics (AISM2008), TP1-3(2), pp.1-6, Sapporo (Japan), August 2008. (AISM2008 Best Student Paper Award) [PDF]
Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko: "Estimation of Camera Motion with Feature Flow Model for 3D Environment Modeling by Using Omni-Directional Camera", Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2009), pp.3089-3094, St. Louis (USA), October 2009. (IEEE Robotics and Automation Society Japan Chapter Young Award) [PDF] [Movie]
Akira Shibata, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Scale-Reconstructable Structure from Motion Using Refraction with a Single Camera", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp.5239-5244, Seattle (USA), May 2015.(IEEE Robotics and Automation Society Japan Chapter Young Award) [PDF] [bibtex]
久米 大将, 藤井 浩光, 山下 淳, 淺間 一: "全方位カメラを用いたスケール復元が可能な水中Structure from Motion", 2014年度精密工学会春季大会学術講演会講演論文集, pp.981-982, 東京, March 2014.(ベストプレゼンテーション賞 受賞) [PDF]
川西 亮輔(指導学生 修士2年), Asia International Symposium on Mechatronics 2008, AISM2008 Best Student Paper Award 受賞, 2008年8月29日. [賞状]
川西 亮輔(指導学生 博士1年), IEEE Robotics and Automation Society Japan Chapter Young Award 受賞, 2009年10月12日. [賞状]
川西 亮輔(指導学生 博士2年), 2010年度精密工学会秋季大会 ベストポスタープレゼンテーション賞 受賞, 2010年9月29日. [賞状]
川西 亮輔, 山下 淳, 金子 透, 淺間 一: "Parallel Line-based Structure from Motion by Using Omnidirectional Camera in Textureless Scene", FA財団論文賞 受賞, 2014年12月12日. [賞状]
久米 大将(指導学生 学部4年), 2014年度精密工学会春季大会学術講演会 ベストプレゼンテーション賞 受賞, 2014年3月20日. [賞状]
柴田 彬(指導学生 修士2年), IEEE Robotics and Automation Society Japan Chapter Young Award 受賞, 2015年05月27日. [賞状]
 |
 |
 |
| 樋口 寛 2015年度学部卒予定 |
柴田 彬 2015年度修士了予定 |
久米 大将 2013年度学部卒 |
 |
 |
 |
| 水滴付き画像1 | 水滴付き画像2 | 水滴除去画像 |
蔵本 昌之, 山下 淳, 金子 透, 三浦 憲二郎: "画像中の視野妨害となる水滴の除去", 映像情報メディア学会誌, Vol.56, No.5, pp.853-857, May 2002. [PDF] [doi:10.3169/itej.56.853]
山下 淳, 金子 透, 西村 正樹, 三浦 憲二郎: "カメラの方向変化を利用した悪天候時の視野明瞭化~首振りカメラを用いた画像中の視野妨害となる水滴の除去~", 映像情報メディア学会誌, Vol.57, No.10, pp.1347-1353, October 2003. [PDF] [doi:10.3169/itej.57.1347]
Atsushi Yamashita, Tomoaki Harada, Toru Kaneko and Kenjiro T. Miura: "Virtual Wiper -Removal of Adherent Noises from Images of Dynamic Scenes by Using a Pan-Tilt Camera-", Advanced Robotics, Vol.19, No.3, pp.295-310, March 2005. [PDF] [bibtex] [doi:10.1163/1568553053583643]
福地 功, 山下 淳, 金子 透, 三浦 憲二郎: "時空間画像処理による雨天時画像からの視野妨害ノイズ除去", 映像情報メディア学会誌, Vol.62, No.5, pp.771-777, May 2008. [PDF] [doi:10.3169/itej.62.771]
藤井 浩光, 杉本 和也, 山下 淳, 淺間 一: "遠隔操作ロボットのための複数RGB-Dセンサを用いた半隠消映像のオンライン生成", 精密工学会誌, Vol.81, No.12, pp.1185-1192, December 2015. [PDF] [doi:10.2493/jjspe.81.1185]
山下 淳, 日本ロボット学会 研究奨励賞 受賞, 2006年9月15日. [賞状] [副賞のメダル(表)] [副賞のメダル(表)]
福地 功(指導学生 修士14年), 動的画像処理実利用化ワークショップDIA2007 研究奨励賞次点, 2007年3月8日. [DIA2007HP]
福地 功(指導学生 修士2年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2008年2月16日. [賞状]
山下 淳, 第4回競基弘賞学術業績賞 受賞, 2009年1月15日. [賞状] [副賞のトロフィー] [新聞新聞での紹介記事] [Robot Watchでの紹介記事]
松井 彰良(指導学生 修士2年), 精密工学会画像応用技術専門委員会・映像情報メディア学会メディア工学研究会委員会 合同サマーセミナー2009 優秀発表賞 受賞, 2009年8月28日. [賞状]
松井 彰良, 山下 淳, 金子 透: 第15回ロボティクスシンポジア 最優秀論文賞 受賞, 2010年3月15日. [賞状]
松井 彰良(指導学生 2009年度修士修了), 計測自動制御学会 SI部門 若手奨励賞 受賞, 2010年12月24日. [賞状]
山下 淳, 日本機械学会ロボティクス・メカトロニクス部門 ROBOMEC表彰 受賞, 2011年5月27日. [賞状] [副賞のメダル]
Tatsuya Kittaka, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Seeing through Obstacles by Using Movable RGB-D Sensors", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
 |
 |
| 橘髙 達也 2015年度学部卒予定 |
杉本 和也 2014年度修士了 |
 |
 |
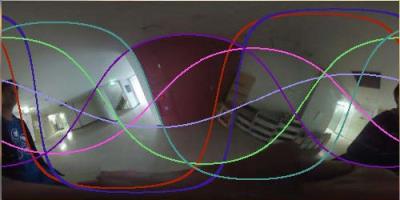 |
| ドローン | カメラ | 全方位画像からの特徴線検出 |
Binbin Xu, Sarthak Pathak, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Robot Body Occlusion Removal in Omnidirectional Video Using Color and Shape Information", Proceedings of the 6th International Conference on Advanced Mechatronics (ICAM2015), pp.49-50, Tokyo (Japan), December 2015. [PDF]
Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Rotation Removed Stabilization of Omnidirectional Videos Using Optical Flow", Proceedings of the 6th International Conference on Advanced Mechatronics (ICAM2015), pp.51-52, Tokyo (Japan), December 2015. [PDF]
Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Complete Omnidirectional Rotation Estimation for Flying Robots using Lines", 第33回日本ロボット学会学術講演会予稿集(RSJ2015), RSJ2015AC2G2-01, pp.1-4, 東京, September 2015. [PDF]
Binbin Xu, Sarthak Pathak, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Robot Body Occlusion Removal in Omnidirectional Video Using Color and Shape Information", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
 |
 |
| Sarthak Pathak 2017年度博士了予定 |
徐 彬斌 2016年度修士了予定 |
 |
 |
 |
| 水面の画像 | 補正した画像 | 3次元計測結果 |
成瀬 達哉, 山下 淳, 金子 透, 小林 祐一: "魚眼ステレオカメラを用いた水中物体の3次元計測", 精密工学会誌, Vol.79, No.4, pp.344-348, April 2013. [PDF] [doi:10.2493/jjspe.79.344]
伊部 公紀, 山下 淳, 金子 透, 小林 祐一: "マニピュレータに搭載したレーザレンジファインダを用いた透明容器中の液中物体の3次元形状計測", 映像情報メディア学会誌, Vol.67, No.11, pp.J379-J387, November 2013. [PDF] [doi:10.3169/itej.67.J379]
伊部 公紀, 小林 祐一, 金子 透, 山下 淳: "複光路単眼ステレオによる直方体容器中の水中物体の3次元計測", 精密工学会誌, Vol.81, No.12, pp.1093-1101, December 2015. [PDF] [doi:10.2493/jjspe.81.1093]
Kazuki Sakamoto, Alessandro Moro, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Three-Dimensional Measurement of Objects in Liquid with an Unknown Refractive Index Using Fisheye Stereo Camera", Proceedings of the 2014 IEEE/SICE International Symposium on System Integration (SII2014), pp.281-286, Tokyo (Japan), December 2014. [PDF]
Seungchul Kwak, Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Development of Acoustic Camera-Imaging Simulator Based on Novel Model", Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC2015), pp.1719-1724, Rome (Italy), June 2015. [PDF]
鈴木 陸実(指導学生 学部4年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2007年2月24日. [賞状]
河井 良平(指導学生 修士2年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2010年2月27日. [賞状]
南川 豊浩(指導学生 学部4年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2011年2月19日. [賞状] [トロフィー]
伊部 公紀(指導学生 博士3年), 映像情報メディア学会 優秀研究発表賞 受賞, 2012年12月18日. [賞状] [副賞の楯]
坂本 一樹(指導学生 学部4年), 動的画像処理実利用化ワークショップDIA2013 研究奨励賞次点, 2013年3月7日. [DIA2013HP]
 |
 |
| 郭 承澈 2015年度修士了予定 |
坂本 一樹 2012年度学部卒 2014年度修士了 |
 |
 |
| ウェアラブルビジョンシステム | タッチパネル上での誘導 |
久野 素有, 山下 淳, 金子 透: "ステレオカメラを用いたタッチパネル操作支援システムの構築", 電気学会論文誌D, Vol.131, No.4, pp.458-465, April 2011. [PDF] [doi:10.1541/ieejias.131.458]
宮木 理恵, 山下 淳, 金子 透: "プロジェクタ・カメラシステムを用いた色覚障碍者への色情報提示", 電気学会論文誌D, Vol.131, No.4, pp.497-504, April 2011. [PDF] [doi:10.1541/ieejias.131.497]
Atsushi Yamashita, Rie Miyaki and Toru Kaneko: "Color Information Presentation for Color Vision Defective by Using a Projector Camera System", Proceedings of the ACCV2010 Workshop on Application of Computer Vision for Mixed and Augmented Reality, Queenstown (New Zealand), November 2010. [PDF]
Atsushi Yamashita, So Kuno, and Toru Kaneko: "Assisting System of Visually Impaired in Touch Panel Operation Using Stereo Camera", Proceedings of the 2011 IEEE International Conference on Image Processing (ICIP2011), pp.1001-1004, Brussels (Belgium), September 2011. [PDF]
 |
|
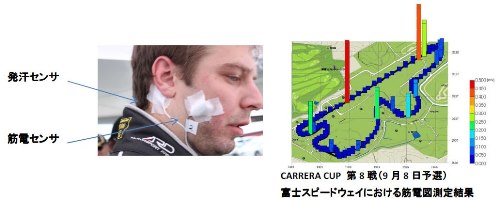
| カーレーサーの計測 (http://www.gsport.co.jp/img/pdf/press_releases20121120.pdfより抜粋) |
山川 博司, Le Quoc Dung, 山下 淳, 淺間 一: "生理計測に基づくカーレーサーのストレス推定", 計測自動制御学会システム・情報部門学術講演会2014講演論文集(SSI2014), pp.853-858, 岡山, November 2014. [PDF]
友井 大将, 温 文, 山川 博司, 山下 淳, 高草木 薫, 淺間 一: "因子分析を用いたドライバーのカーレース中におけるストレス推定", 第20回ロボティクスシンポジア講演予稿集, pp.133-138, 軽井沢, March 2015.(査読付) [PDF]
 |
 |
| 友井 大将 2015年度修士了予定 |
レ クオク ズン 2013年度修士了 |
 |
 |
 |
|
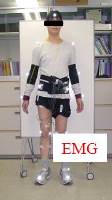
| 動作の計測 | 筋肉の動き | 可視化 |
Qi An, 柳井 香史朗, 中川 純希, 温 文, 山川 博司, 山下 淳, 淺間 一: "実映像と筋活動の重畳表示によるローイング動作教育システム", 日本機械学会論文集, Vol.82, No.834, 15-00424, pp.1-11, February 2016. [doi:10.1299/transjsme.15-00424]
Koshiro Yanai, Qi An, Yuki Ishikawa, Junki Nakagawa, Wen Wen, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Visualization of Muscle Activity during Squat Motion for Skill Education", Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp.86-90, Yokohama (Japan), September 2014. [PDF]
Junki Nakagawa, Qi An, Yuki Ishikawa, Koshiro Yanai, Wen Wen, Hiroshi Yamakawa, Junko Yasuda, Atsushi Yamashita and Hajime Asama: "Extraction and Evaluation of Proficiency in Bed Care Motion for Education Service of Nursing Skill", Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp.91-96, Yokohama (Japan), September 2014. [PDF]
Hiroyuki Okamoto, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Toward Sports Training Service with the Interactive Learning Platform", Proceedings of the 3rd international conference on Serviceology (ICServ2015), T2-1-3, pp.1-4, San Jose (USA), July 2015. [PDF]
Wen Wen, Xiaorui Qiao, Koshiro Yanai, Junki Nakagawa, Junko Yasuda, Atsushi Yamashita and Hajime Asama: "Skill Evaluation and Education Services for Bed-Care Nursing with Sliding Sheet with Regression Analysis", Proceedings of the 3rd international conference on Serviceology (ICServ2015), T3-1-2, pp.1-5, San Jose (USA), July 2015. [PDF]
 |
 |
 |
 |
 |
| 喬 暁蕊 2016年度博士了予定 |
菊地 諒 2015年度修士了予定 |
中村 祐基 2015年度修士了予定 |
中川 純希 2012年度学部卒 2014年度修士了 |
柳井 香史朗 2014年度修士了 |
 |
|
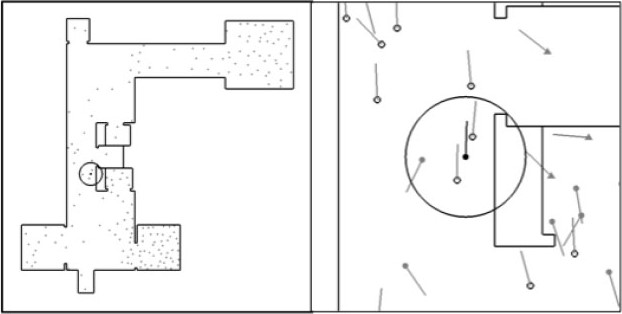
| 歩行者の行動のモデル化:狭い場所で道を譲る行動の発現 |
 |
|
| 移動ロボットのナビゲーション 左図:ロボットが移動している様子.右図:ロボット周囲の拡大図 |
田村 雄介, 濱崎 峻資, 山下 淳, 淺間 一: "環境に応じた人間の移動予測に基づく移動ロボットの人物回避", 日本機械学会論文集(C編), Vol.79, No.799, pp.617-628, March 2013. [PDF] [doi:10.1299/kikaic.79.617]
熊原 渉, 増山 岳人, 田村 雄介, 山下 淳, 淺間 一: "局所経路情報と歩行者流情報を用いた移動ロボットナビゲーション手法", 精密工学会誌, Vol.79, No.4, pp.349-355, April 2013. [PDF] [doi:10.2493/jjspe.79.349]
熊原 渉, 増山 岳人, 田村 雄介, 山下 淳, 淺間 一: "動的環境下における歩行者流を利用した移動ロボットナビゲーション", 計測自動制御学会論文集, Vol.50, No.1, pp.58-67, January 2014. [PDF] [doi:10.9746/sicetr.50.58]
Yusuke Tamura, Phuoc Dai Le, Kentarou Hitomi, Naiwala P. Chandrasiri, Takashi Bando, Atsushi Yamashita and Hajime Asama: "Development of Pedestrian Behavior Model Taking Account of Intention", Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), pp.382-387, Vilamoura (Portugal), October 2012. [PDF]
Naoki Ibe, Gakuto Masuyama, Atsushi Yamashita and Hajime Asama: "Humanlike Behavior Model with Probabilistic Intention", Proceedings of ACM SIGGRAPH2013 Posters, Article No.7, Anaheim (USA), July 2013. [PDF] [Movie] [Link]
 |
 |
 |
 |
| 濱崎 峻資 2012年度修士了 |
熊原 渉 2012年度修士了 |
伊部 直樹 2012年度学部卒 2014年度修士了 |
レーフック ダイ 2011年度学部卒 |
 |
 |
 |
|
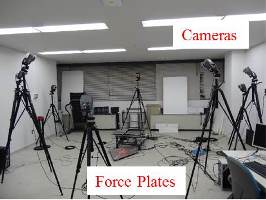
| 人間動作の計測 | 人間動作の計測装置 | 人間動作の解析シミュレーション |
 |
| ロボット技術を用いた膝関節模型による膝負荷計測 |
Qi An, Yuki Ishikawa, Junki Nakagawa, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Measurement of Just Noticeable Difference of Hip Joint for Implementation of Self-efficacy: In Active and Passive Sensation and in Different Speed", Advanced Robotics, Vol.28, No.7, pp.505-511, January 2014. [doi:10.1080/01691864.2013.876938]
安 琪, 石川 雄己, 舩戸 徹郎, 青井 伸也, 岡 敬之, 山川 博司, 山下 淳, 淺間 一: "座面高と速度の異なるヒト起立動作における筋シナジー解析", 計測自動制御学会論文集, Vol.50, No.8, pp.560-568, August 2014.(2015年度計測自動制御学会論文賞 受賞) [PDF] [doi:10.9746/sicetr.50.560]
花谷 耕平, 山川 博司, 石川 雄己, Qi An, 山下 淳, 淺間 一: "膝関節実形状模型を用いたヒトの起立動作時の負荷計測システムの開発", 精密工学会誌, Vol.81, No.1, pp.99-104, January 2015. [PDF] [doi:10.2493/jjspe.81.99]
Junki Nakagawa, Qi An, Yuki Ishikawa, Hiroyuki Oka, Kaoru Takakusaki, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Human Motor Skill in Dart Throwing Motion at Different Distance", SICE Journal of Control, Measurement, and System Integration, Vol.8, No.1, pp.79-85, January 2015. [PDF] [doi:10.9746/jcmsi.8.79]
Qi An, Yuki Ishikawa, Shinya Aoi, Tetsuro Funato, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Muscle Synergy Contribution on Human Standing-up Motion Using Human Neuro-Musculoskeletal Model", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp.5885-5890, Seattle (USA), May 2015. [PDF] [Movie] [bibtex]
安 琪, 石川 雄己, 舩戸 徹郎, 青井 伸也, 岡 敬之, 山川 博司, 山下 淳, 淺間 一: "座面高と速度の異なるヒト起立動作における筋シナジー解析", 2015年度計測自動制御学会論文賞 受賞, 2015年10月27日. [賞状] [副賞の楯]
Qi An, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Muscle Synergies of Sit-to-Stand and Walking Account for Sit-to-Walk Motion", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
 |
 |
 |
 |
 |
|
| 楊 濘嘉 2016年度修士了予定 |
石川 雄己 2012年度修士了 2016年度博士了予定 |
中野 信泰 2014年度学部卒 |
安 琪 2014年度博士了 |
花谷 耕平 2013年度学部卒 |
中川 純希 2012年度学部卒 2014年度修士了 |
 |
|
| ラバーハンド錯覚 |
Wen Wen, Atsushi Yamashita and Hajime Asama: "The Sense of Agency during Continuous Action: Performance is More Important than Action-Feedback Association", PLoS ONE, Vol.10, No.4, e0125226, pp.1-16, April 2015. [doi:10.1371/journal.pone.0125226]
辻 琢真, 濱崎 峻資, 前田 貴記, 加藤 元一郎, 岡 敬之, 山川 博司, 高草木 薫, 山下 淳, 淺間 一: "ラバーハンド錯覚における筋電位及び皮膚電位反応の解析", 計測自動制御学会論文集, Vol.51, No.6, pp.440-447, June 2015. [PDF] [doi:10.9746/sicetr.51.440]
Wen Wen, Atsushi Yamashita and Hajime Asama: "The Influence of Action-Outcome Delay and Arousal on Sense of Agency and the Intentional Binding Effect", Consciousness and Cognition, Vol.36, pp.87-95, November 2015. [doi:10.1016/j.concog.2015.06.004]
松本 倫実, 濱崎 峻資, 前田 貴記, 加藤 元一郎, 山川 博司, 高草木 薫, 山下 淳, 淺間 一: "聴覚刺激及びリズムの周期性が運動主体感に与える影響の評価", 第23回ライフサポート学会フロンティア講演会予稿集, p.59, February 2014.(ライフサポート学会奨励賞 受賞) [PDF]
簑原 凜, 温 文, 濱崎 峻資, 前田 貴記, 加藤 元一郎, 山川 博司, 山下 淳, 淺間 一: "スイッチ操作力の差異が運動主体感に与える影響の評価", 第20回ロボティクスシンポジア講演予稿集, pp.139-144, 軽井沢, March 2015.(査読付) [PDF]
Shunsuke Hamasaki, Qi An, Wen Wen, Yusuke Tamura, Hiroshi Yamakawa, Atsushi Yamashita, Hajime Asama, Satoshi Shibuya and Yukari Ohki: "Evaluating Effect of Sense of Ownership and Sense of Agency on Body Representation Change of Human Upper Limb", 2015 International Symposium on Micro-Nano Mechatronics and Human Science (MHS2015), Best Poster Award 受賞, 2015年11月25日. [賞状]
 |
|
 |
 |
 |
| 村松 克俊 2015年度学部卒予定 |
濱崎 峻資 2012年度修士了 2016年度博士了予定 |
簑原 凜 2014年度学部卒 2016年度修士了予定 |
辻 琢真 2013年度修士了 |
松本 倫実 2013年度学部卒 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}