| 概要 | 動画集 | テーマ一覧 |
 |
ロボットやマルチメディア情報処理に関する研究を行っています.
研究を進めるための基礎となるテクニックは,
 |
研究内容の概要につきましては,
使用しているロボットやセンサなどの実験装置につきましては,
を御覧下さい. |
| 任意視点映像提示1 (ROBIO2016) |
任意視点映像提示2 (SI2016) |
| 人と人とのすれ違い動作解析 (SIGGRAPH2013) |
Smartphone Zombie検出 (RA-L 2020) |
| 深層学習を用いたステレオ計測 (IEEE Access 2019) |
深層学習を用いた深度推定 (IROS2020) |
| 全天球ビデオのスタビライゼーション (ICIP2016) |
全天球カメラの映像補間 (RA-L 2017) |
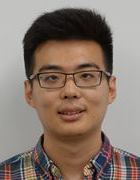
全天球カメラの位置姿勢推定 (ICRA2018) |
| RGB-Dセンサを用いたSLAM (SI2013) |
wifiを利用した自己位置推定 (IROS2016) |
走破性を考慮したロボットの動作計画 (ICRA2015) |
| オーロラ3次元計測 (SIGGRAPH Asia 2016) |
音響カメラを用いた水中センシング1 (RA-L 2020) |
音響カメラを用いた水中センシング2 (RA-L 2021) |
| 機械学習を用いた打音検査 (ICRA2016) |
| 筋シナジーを用いた起立動作解析1 (ICRA2014) |
筋シナジーを用いた起立動作解析2 (ICRA2015) |
| リハビリ技能の解明 (ICRA2018) |
リハビリ回復度合い推定 (ICRA2020) |
| 超高速光切断センシング (SI2020) |
これまでの研究テーマは以下の通りです.現在は中断している研究テーマも,そのテーマを希望する学生が配属されましたら,再開するかどうか相談します.
興味をお持ちの方,更に詳しい内容を知りたい方はメール等でご連絡下さい.
 |
 |
 |
 |
 |
|
| 前後左右方向にカメラを取り付けた全方向移動ロボット | 左図:4台のカメラの映像.右図:生成した俯瞰画像 |
 |
 |
|
| NEDOプロジェクトで開発した水陸両用移動ロボット | 移動ロボットの遠隔操作画面 (東芝と共同開発) |
 |
 |
 |
 |
|
| 水陸両用移動ロボット | 遠隔操作画面 | 4台のカメラの映像 | 生成した俯瞰画像 |
佐藤 貴亮, 藤井 浩光, Alessandro Moro, 杉本 和也, 野末 晃, 三村 洋一, 小幡 克実, 山下 淳, 淺間 一: "無人化施工用俯瞰映像提示システムの開発", 日本機械学会論文集, Vol. 81, No. 823, 14-00031, pp. 1-13, March 2015. [doi:/10.1299/transjsme.14-00031] [PDF]
小松 廉, 藤井 浩光, 山下 淳, 淺間 一: "カメラ配置設計による故障時に備えたロボット遠隔操作のための俯瞰映像提示システムの開発", 精密工学会誌, Vol. 81, No. 12, pp. 1206-1212, December 2015. [doi:10.2493/jjspe.81.1206] [PDF]
粟島 靖之, 小松 廉, 藤井 浩光, 田村 雄介, 山下 淳, 淺間 一: "ロボット遠隔操作のためのLiDARを用いた全方位3次元測距による俯瞰映像上での障害物提示", 精密工学会誌, Vol. 83, No. 12, pp. 1216-1223, December 2017. [doi:10.2493/jjspe.83.1216] [PDF]
岩滝 宗一郎, 孫 蔚, 藤井 浩光, 淵田 正隆, アレッサンドロ モロ, 野田 隆司, 久禮 一樹, 中沢 浩一, 吉灘 裕, 山下 淳, 淺間 一: "ブルドーザの位置姿勢変化および周囲危険領域を提示可能な任意視点映像提示", 日本機械学会論文集, Vol. 84, No. 866, 18-00196, pp. 1-17, October 2018. [doi:10.1299/transjsme.18-00196]
Ren Komatsu, Hiromitsu Fujii, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Octave Deep Plane-sweeping Network: Reducing Spatial Redundancy for Learning-based Plane-sweeping Stereo", IEEE Access, Vol. 7, pp. 150306-150317, December 2019. [doi:10.1109/ACCESS.2019.2947195]
岩滝 宗一郎, 淵田 正隆, モロ アレッサンドロ, 野田 隆司, 矢津田 修, 中沢 浩一, 吉灘 裕, 山下 淳, 淺間 一: "レーザレーダと複数のカメラを用いた任意視点映像提示システムのセンサキャリブレーション", 精密工学会誌, Vol. 85, No. 12, pp. 1110-1116, December 2019. [doi:10.2493/jjspe.85.1110]
筑紫 彰太, 森山 湧志, 藤井 浩光, 田村 雄介, 山川 博司, 永谷 圭司, 坂井 郁也, 千葉 拓史, 山本 新吾, 茶山 和博, 山下 淳, 淺間 一: "遠隔操作オペレータの要求仕様に基づいたバックホウ盛土作業のための映像自動提示", 精密工学会誌, Vol. 86, No. 2, pp. 164-170, February 2020. [doi:10.2493/jjspe.86.164]
Ren Komatsu, Hiromitsu Fujii, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Free Viewpoint Image Generation System Using Fisheye Cameras and a Laser Rangefinder for Indoor Robot Teleoperation", ROBOMECH Journal, Vol. 7, 15, pp. 1-10, March 2020. [doi:10.1186/s40648-020-00163-4]
Takaaki Sato, Alessandro Moro, Atsushi Sugahara, Tsuyoshi Tasaki, Atsushi Yamashita and Hajime Asama: "Spatio-Temporal Bird's-Eye View Images Using Multiple Fish-eye Cameras", Proceedings of the 2013 IEEE/SICE International Symposium on System Integration (SII2013), pp. 753-758, Kobe (Japan), December 2013. [doi:10.1109/SII.2013.6776674] [PDF]
Wei Sun, Soichiro Iwataki, Ren Komatsu, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Simultaneous Tele-visualization of Construction Machine and Environment Using Body Mounted Cameras", Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO2016), pp. 382-387, Qingdao (China), December 2016. [doi:10.1109/ROBIO.2016.7866352] [PDF] [Video]
佐藤 貴亮, Alessandro Moro, 山下 淳, 淺間 一: "複数の魚眼カメラの時空間データによる全方位俯瞰画像生成", 第18回ロボティクスシンポジア講演予稿集, pp. 367-372, 山形, March 2013.(査読付) [PDF]
岩滝 宗一郎, 淵田 正隆, アレッサンドロ モロ, 野田 隆司, 矢津田 修, 中沢 浩一, 吉灘 裕, 山下 淳, 淺間 一: "レーザレーダと複数のカメラを用いた任意視点映像提示システムのセンサキャリブレーション", 動的画像処理実利用化ワークショップ2019講演論文集(DIA2019), pp. 184-189, 北九州, March 2019.(研究奨励賞 受賞) [PDF]
佐藤 貴亮, Alessandro Moro, 山下 淳, 淺間 一: "複数の魚眼カメラとLRFを用いた重畳型全方位俯瞰画像提示手法の構築", 第13回計測自動制御学会システムインテグレーション部門講演会(SI2012), SI2012優秀講演, 2012年12月20日. [賞状]
粟島 靖之, 小松 廉, 藤井 浩光, 田村 雄介, 山下 淳, 淺間 一: "ロボット遠隔操作のための3次元測域センサを用いた俯瞰映像上での障害物提示", 第17回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2016), SI2016優秀講演賞 受賞, 2016年12月18日. [賞状]
小松 廉, 藤井 浩光, 田村 雄介, 山下 淳, 淺間 一: "複数台のカメラとレーザ測域センサによる人工物の幾何情報を考慮した任意視点映像生成", 第17回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2016), SI2016優秀講演賞 受賞, 2016年12月18日. [賞状]
岩滝 宗一郎(指導学生 博士3年), 動的画像処理実利用化ワークショップDIA2019 研究奨励賞 受賞, 2019年03月07日. [賞状]
 |
 |
 |
 |
| SI2012優秀講演 | SI2016優秀講演賞 (粟島ら) |
SI2016優秀講演賞 (小松ら) |
DIA2019研究奨励賞 |
 |
 |
 |
 |
 |
| 菅沢 佑太 Yuta Sugasawa 東京大学 2020.4-2022.3修士 |
陳 偉傑 Weijie Chen 東京大学 2019.4-2021.9修士 |
森山 湧志 Yushi Moriyama 東京大学 2017.4-2019.3修士 |
粟島 靖之 Yasuyuki Awashima 東京大学 2016.4-2018.3修士 |
孫 蔚 Wei Sun 東京大学 2016.4-2018.3修士 |
 |
 |
 |
||
| 岩滝 宗一郎 Soichiro Iwataki 東京大学 2013.4-2014.3学部 2014.4-2016.3修士 2016.4-2020.3博士 2020.3博士取得 |
小松 廉 Ren Komatsu 東京大学 2014.4-2016.3修士 2016.4-2020.3博士 (満期修了) 2020.4-2020.7 学術支援専門職員 2020.7博士取得 2020.8-特任助教 |
佐藤 貴亮 Takaaki Sato 東京大学 2012.4-2014.3修士 |
 |
 |
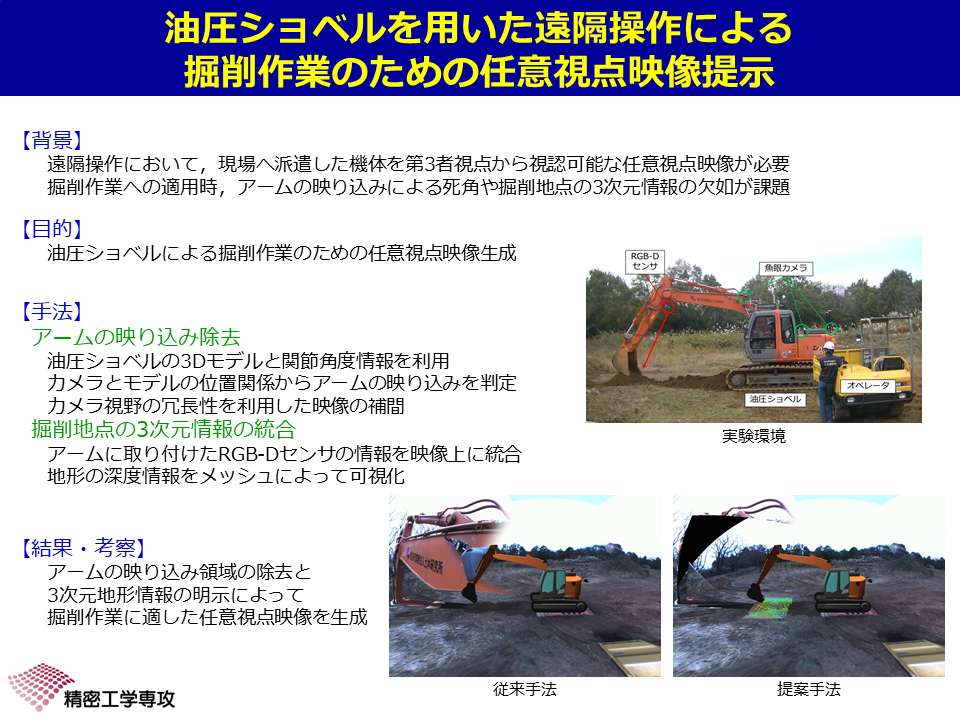
藤井 浩光, 杉本 和也, 山下 淳, 淺間 一: "遠隔操作ロボットのための複数RGB-Dセンサを用いた半隠消映像のオンライン生成", 精密工学会誌, Vol. 81, No. 12, pp. 1185-1192, December 2015.(FA財団論文賞受賞) [doi:10.2493/jjspe.81.1185] [PDF]
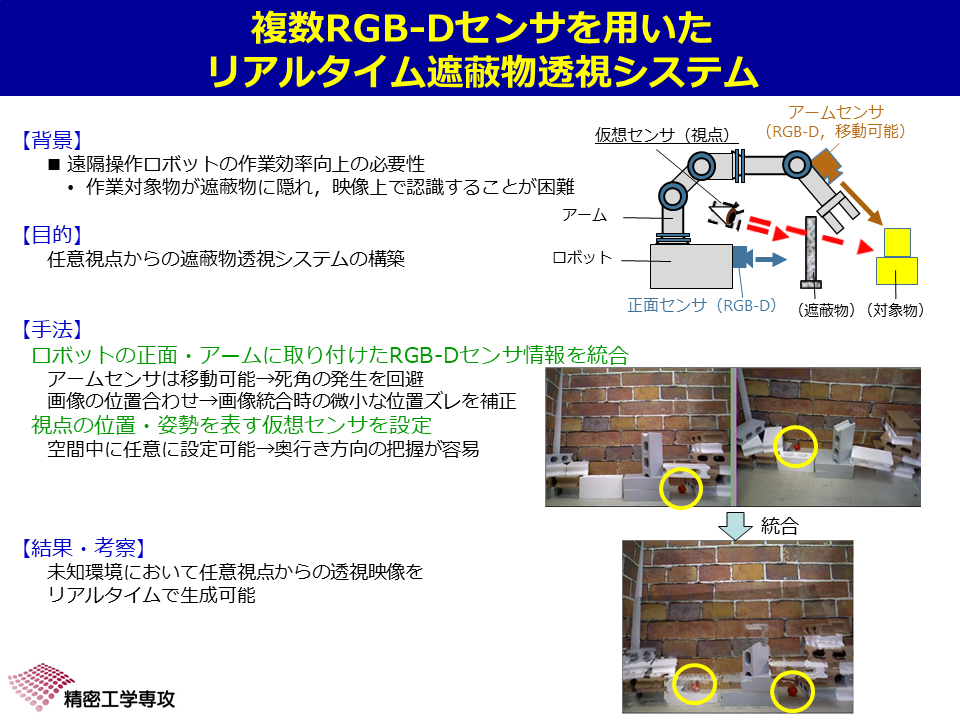
橘高 達也, 藤井 浩光, 山下 淳, 淺間 一: "移動可能なRGB-Dセンサを用いた任意視点からの遮蔽物透視システム", 精密工学会誌, Vol. 83, No. 3, pp. 235-244, March 2017. [doi:10.2493/jjspe.83.235] [PDF]
長野 樹, 藤井 浩光, 橘高 達也, 淵田 正隆, 深瀬 勇太郎, 青木 滋, 鳴海 智博, 山下 淳, 淺間 一: "遠隔操縦建機のための屋外環境における遮蔽物透視システム", 精密工学会誌, Vol. 84, No. 12, pp. 1085-1091, December 2018. [doi:10.2493/jjspe.84.1085] [PDF]
Tatsuki Nagano, Ryosuke Yajima, Shunsuke Hamasaki, Keiji Nagatani, Alessandro Moro, Hiroyuki Okamoto, Genki Yamauchi, Takeshi Hashimoto, Atsushi Yamashita and Hajime Asama: "Arbitrary Viewpoint Visualization for Teleoperated Hydraulic Excavators", Journal of Robotics and Mechatronics, Vol. 32, No. 6, pp. 1233-1243, December 2020. [doi:10.20965/jrm.2020.p1233] [PDF]
Kazuya Sugimoto, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Half Diminished Reality Image Using Three RGB-D Sensors for Remote Contorol Robots", Proceedings of the 12th IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2014), 43, Toyako (Japan), October 2014. [doi:10.1109/SSRR.2014.7017676] [PDF]
Tatsuya Kittaka, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Real-time Registration of RGB-D Image Pair for See-through System", Proceedings of the 2018 IEEE International Conference on Image Processing (ICIP2018), pp. 1233-1237, Athens (Greece), October 2018. [doi:10.1109/ICIP.2018.8451512] [PDF]
Tatsuya Kittaka, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Seeing through Obstacles by Using Movable RGB-D Sensors", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
橘髙 達也(指導学生 修士1年), 日本機械学会若手優秀講演フェロー賞 受賞, 2016年06月09日. [賞状] [副賞の楯]
藤井 浩光, 杉本 和也, 山下 淳, 淺間 一: "遠隔操作ロボットのための複数RGB-Dセンサを用いた半隠消映像のオンライン生成", FA財団論文賞 受賞, 2016年12月09日. [賞状]
 |
 |
 |
| ICAM2015 Honorable Mention | 日本機械学会フェロー賞 | FA財団論文賞 |
 |
 |
 |
| 長野 樹 Tatsuki Nagano 東京大学 2017.4-2018.3学部 2018.4-2020.3修士 |
橘髙 達也 Tatsuya Kittaka 東京大学 2015.4-2016.3学部 2016.4-2018.3修士 |
杉本 和也 Kazuya Sugimoto 東京大学 2013.4-2015.3修士 |
 |
 |
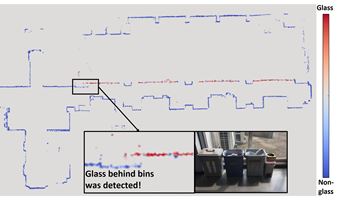 |
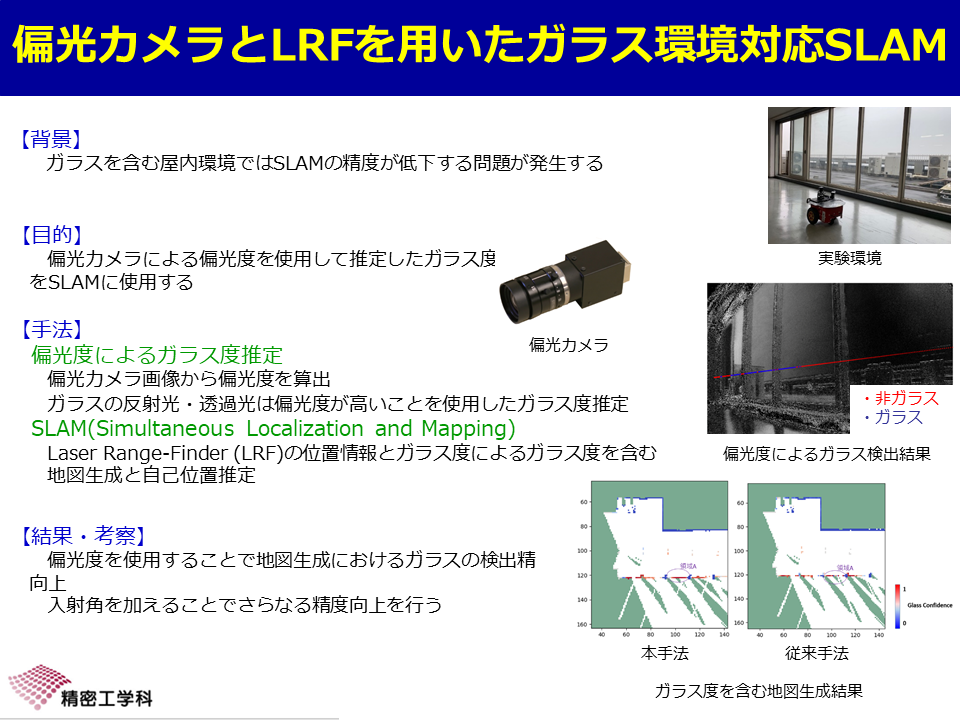
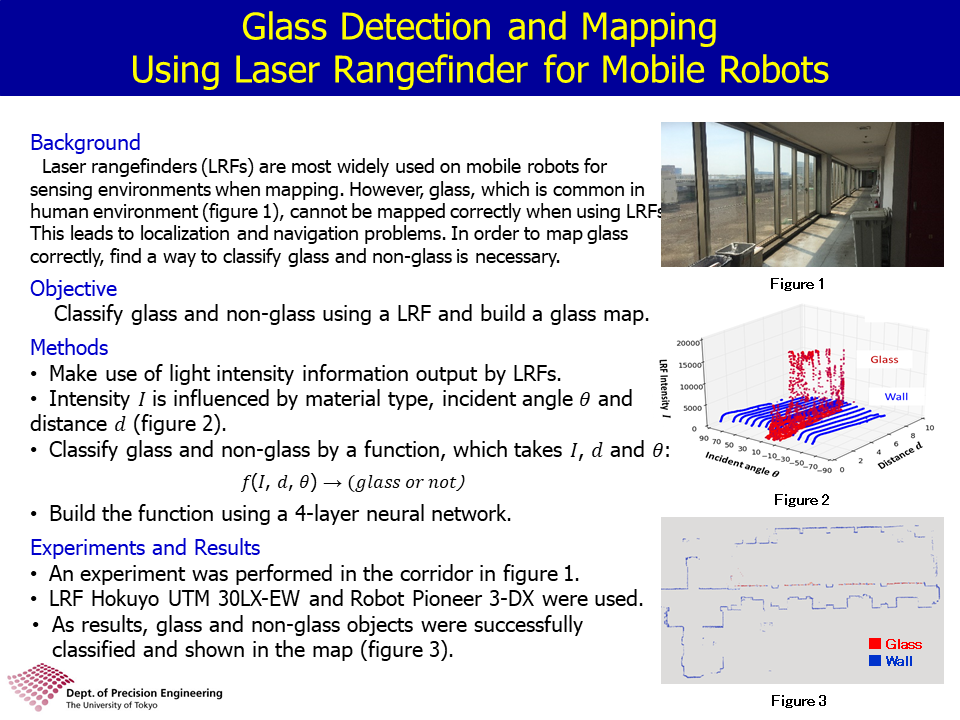
| ガラスを含む環境における地図生成結果 |
Jun Jiang, Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Online Glass Confidence Map Building Using Laser Rangefinder for Mobile Robots", Advanced Robotics, Vol. 34, No. 23, pp. 1506-1521, December 2020. [doi:10.1080/01691864.2020.1819873]
山口 恵璃, 樋口 寛, 山下 淳, 淺間 一: "偏光カメラの偏光度とLRFの距離情報を用いたガラス環境対応SLAM", 精密工学会誌, Vol. 87, No. 1, pp. 114-119, January 2021. [doi:10.2493/jjspe.87.114] [PDF]
岩科 進也, 山下 淳, 金子 透: "レーザ・超音波センサ搭載移動ロボットによる透明物体を含む環境における2次元グリッド地図生成", 精密工学会画像応用技術専門委員会サマーセミナー2007テキスト, Vol. 16, pp. 99-102, 伊豆, August 2007. [PDF]
Jun Jiang, Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Glass and Non-Glass Objects Classification Using Laser Rangefinders for Mobile Robots in Indoor Environments", Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017), p. 5529, Vancouver (Canada), September 2017. [PDF]
Jun Jiang, Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Glass Confidence Maps Building Based on Neural Networks Using Laser Range-finders for Mobile Robots", Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII2017), pp. 405-410, Taipei (Taiwan), December 2017. [doi:10.1109/SII.2017.8279246] [PDF]
Jun Jiang, Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Robust Map Registration for Building Online Glass Confidence Maps", Proceedings of the 10th IFAC Symposium on Intelligent Autonomous Vehicles (IAV2019), pp. 362-367, Gdansk (Poland), July 2019. (IFAC PaperOnLine, Vol. 52, No. 8, pp. 362-367, September 2019) [doi:10.1016/j.ifacol.2019.08.108] [PDF]
山口 恵璃, 樋口 寛, 山下 淳, 淺間 一: "ガラス環境のSLAMにおける偏光カメラとLRFを用いたガラス検出", 動的画像処理実利用化ワークショップ2020講演論文集(DIA2020), pp. 7-11, 沖縄, March 2020.(研究奨励賞次点) [PDF]
山口 恵璃(指導学生 学部4年), 動的画像処理実利用化ワークショップDIA2020 研究奨励賞次点, 2020年03月09日. [DIA2020HP]
 |
 |
 |
 |
| 山口 恵璃 Eri Yamaguchi 東京大学 2019.4-2020.3学部 2020.4-2022.3修士 |
Nicolas Rabany 東京大学 2018.10-2019.3 交換留学生(EPFL) |
江 君 Jun Jiang 東京大学 2016.9-2018.9修士 |
岩科 進也 Shinya Iwashina 静岡大学 2006.4-2007.3学部 2007.4-2009.3修士 |
 |
 |
 |
 |
|
| 単眼カメラを用いた3次元センシング | 計測実験の様子 |
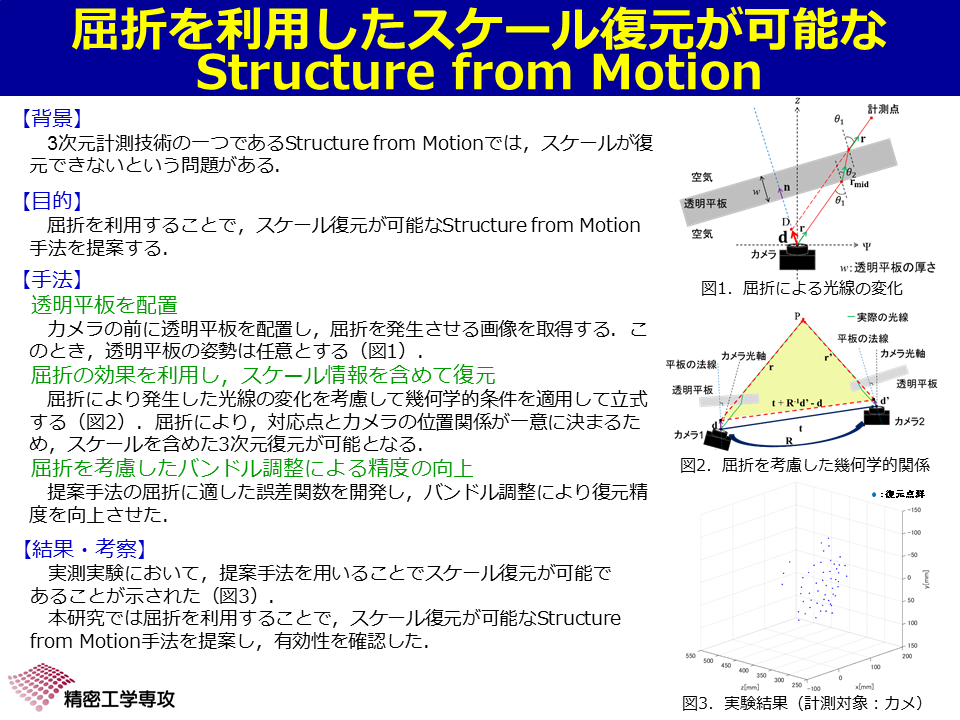
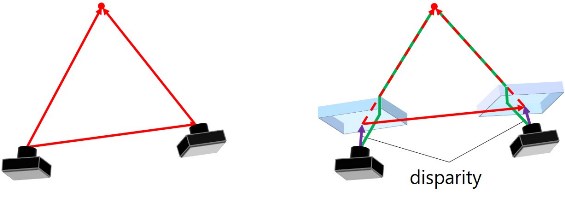
柴田 彬, 藤井 浩光, 山下 淳, 淺間 一: "単眼カメラと透明平板による屈折を利用したスケール復元が可能なStructure from Motion", 精密工学会誌, Vol. 82, No. 12, pp. 1045-1053, December 2016. [doi:10.2493/jjspe.82.1045] [PDF]
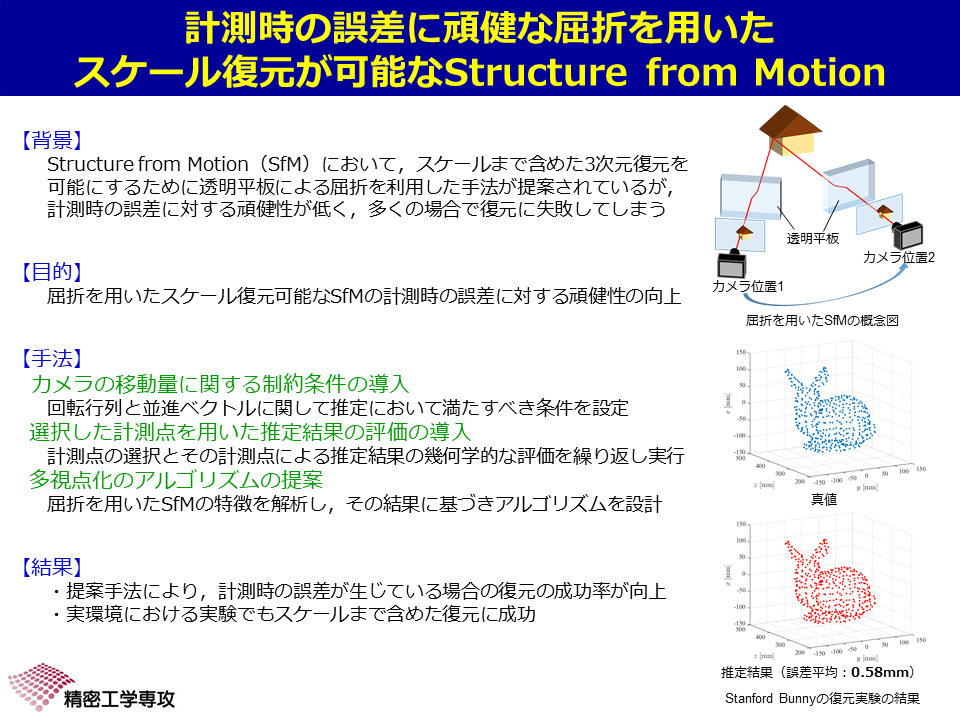
奥村 有加里, 藤井 浩光, 山下 淳, 淺間 一: "屈折を利用したスケール復元が可能な計測誤差に頑健なStructure from Motion", 精密工学会誌, Vol. 83, No. 12, pp. 1201-1208, December 2017. [doi:10.2493/jjspe.83.1201] [PDF]
Akira Shibata, Yukari Okumura, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Refraction-based Bundle Adjustment for Scale Reconstructible Structure from Motion", Journal of Robotics and Mechatronics, Vol. 30, No. 4, pp. 660-670, August 2018. [doi:10.20965/jrm.2018.p0660]
後田 啓太朗, 樋口 寛, 山下 淳, 淺間 一: “屈折の大きさを考慮したスケール復元可能なStructure from Motion”, 精密工学会誌, Vol. 87, No.3, pp. 301-306, March 2021. [doi:10.2493/jjspe.87.301] [PDF]
Akira Shibata, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Scale-Reconstructable Structure from Motion Using Refraction with a Single Camera", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp. 5239-5244, Seattle (USA), May 2015. (IEEE Robotics and Automation Society Japan Chapter Young Award) [doi:10.1109/ICRA.2015.7139929] [PDF] [bibtex]
Hiromasa Kume, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Scale Reconstructable Structure from Motion Using Refraction with Omnidirectional Camera", Proceedings of the 11th France-Japan congress on Mechatronics / the 9th Europe-Asia congress on Mechatronics / the 17th International Conference on Research and Education in Mechatronics (MECATRONICS-REM2016), pp. 117-122, Compiegne (France), June 2016. [doi:10.1109/MECATRONICS.2016.7547126] [PDF]
久米 大将, 藤井 浩光, 山下 淳, 淺間 一: "全方位カメラを用いたスケール復元が可能な水中Structure from Motion", 2014年度精密工学会春季大会学術講演会講演論文集, pp. 981-982, 東京, March 2014.(ベストプレゼンテーション賞 受賞) [PDF]
柴田 彬, 藤井 浩光, 山下 淳, 淺間 一: "屈折を利用した単眼カメラによるスケール復元が可能なStructure from Motion", 第20回ロボティクスシンポジア講演予稿集, pp. 25-30, 軽井沢, March 2015.(査読付) [PDF]
奥村 有加里, 藤井 浩光, 山下 淳, 淺間 一: "屈折を用いたスケール復元可能なStructure from Motionのための初期値フィルタリングによる全体最適化", 第34回日本ロボット学会学術講演会予稿集(RSJ2016), RSJ2016AC1V1-04, pp. 1-4, 山形, September 2016.(日本ロボット学会研究奨励賞受賞) [PDF]
久米 大将(指導学生 学部4年), 2014年度精密工学会春季大会学術講演会 ベストプレゼンテーション賞 受賞, 2014年3月20日. [賞状]
柴田 彬(指導学生 修士2年), IEEE Robotics and Automation Society Japan Chapter Young Award 受賞, 2015年05月27日. [賞状]
奥村 有加里(指導学生 修士1年), 日本ロボット学会 研究奨励賞 受賞, 2017年09月13日. [賞状] [副賞のメダル(表)] [副賞のメダル(裏)]
 |
 |
 |
| 精密工学会春季大会学術講演会 ベストプレゼンテーション賞 |
IEEE RAS-JP Young Award | 日本ロボット学会 研究奨励賞 |
 |
 |
 |
 |
| 後田 啓太朗 Keitaro Ushiroda 東京大学 2019.4-2020.3学部 2020.4-2022.3修士 |
奥村 有加里 Yukari Okumura 東京大学 2016.4-2017.3学部 2017.4-2019.3修士 |
柴田 彬 Akira Shibata 東京大学 2014.4-2016.3修士 |
久米 大将 Hiromasa Kume 東京大学 2013.4-2014.3学部 |
 |
 |
Yusheng Wang, Yonghoon Ji, Dingyu Liu, Yusuke Tamura, Hiroshi Tsuchiya, Atsushi Yamashita and Hajime Asama: "ACMarker: Acoustic Camera-based Fiducial Marker System in Underwater Environment", IEEE Robotics and Automation Letters, Vol. 5, No. 4, pp. 5018-5025, October 2020. [doi:10.1109/LRA.2020.3005375] [Video]
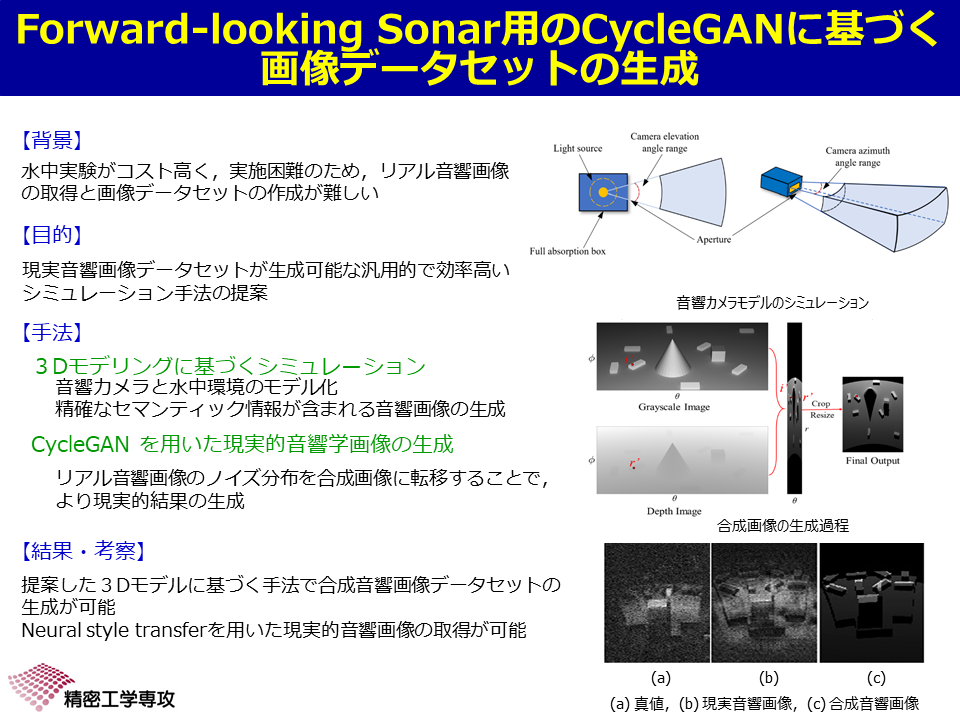
Dingyu Liu, Yusheng Wang, Yonghoon Ji, Hiroshi Tsuchiya, Atsushi Yamashita and Hajime Asama: "CycleGAN-based Realistic Image Dataset Generation for Forward-looking Sonar", Advanced Robotics, Vol. 35, No. 3-4, pp. 242-254, February 2021. [doi:10.1080/01691864.2021.1873845]
Yusheng Wang, Yonghoon Ji, Dingyu Liu, Hiroshi Tsuchiya, Atsushi Yamashita and Hajime Asama: "Elevation Angle Estimation in 2D Acoustic Images Using Pseudo Front View", IEEE Robotics and Automation Letters, Vol. 6, No. 2, pp. 1535-1542, April 2021. [doi:10.1109/LRA.2021.3058911] [PDF] [Video]
Yusheng Wang, Yonghoon Ji, Hanwool Woo, Yusuke Tamura, Hiroshi Tsuchiya, Atsushi Yamashita and Hajime Asama: "Acoustic Camera-based Pose Graph SLAM for Dense 3D Mapping in Underwater Environments", IEEE Journal of Oceanic Engineering, Vol. 46, No. 3, pp. 829-847, July 2021. [doi:10.1109/JOE.2020.3033036]
Seungchul Kwak, Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Development of Acoustic Camera-Imaging Simulator Based on Novel Model", Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC2015), pp. 1719-1724, Rome (Italy), June 2015. [PDF]
Yonghoon Ji, Seungchul Kwak, Atsushi Yamashita and Hajime Asama: "Acoustic Camera-based 3D Measurement of Underwater Objects through Automated Extraction and Association of Feature Points", Proceedings of the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI2016), pp. 224-230, Baden-Baden (Germany), September 2016. [doi:10.1109/MFI.2016.7849493] [PDF]
Ngoc Trung Mai, Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "3D Reconstruction of Line Features Using Multi-view Acoustic Images in Underwater Environment", Proceedings of 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI2017), Daegu (Korea), pp. 312-317, November 2017. [PDF]
Yusheng Wang, Yonghoon Ji, Hanwool Woo, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Three-dimensional Underwater Environment Reconstruction with Graph Optimization Using Acoustic Camera", Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII2019), pp. 28-33, Paris (France), January 2019. [doi:10.1109/SII.2019.8700464] [PDF]
Yusheng Wang, Yonghoon Ji, Dingyu Liu, Yusuke Tamura, Hiroshi Tsuchiya, Atsushi Yamashita and Hajime Asama: "ACMarker: Acoustic Camera-based Fiducial Marker System in Underwater Environment", Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), Las Vegas (USA), October 2020. (IEEE Robotics and Automation Letters, Vol. 5, No. 4, pp. 5018-5025, October 2020.) (SICE International Young Authors Award (SIYA-IROS2020)) [PDF] [Video]
Yusheng Wang(指導学生 博士2年), SICE International Young Authors Award for IROS2020 (SIYA-IROS2020) 受賞, 2020年10月25日. [賞状]
Yusheng Wang(指導学生 博士2年), IEEE Robotics and Automation Society Japan Joint Chapter Young Award 受賞, 2021年06月07日. [賞状]
 |
 |
| SIYA-IROS2020 | IEEE RAS-JP Young Award |
 |
 |
 |
 |
 |
| 呉 初婕 Chujie Wu 東京大学 2021.9-2023.9修士 |
劉 丁瑜 Dingyu Liu 東京大学 2019.9-2021.9修士 |
王 钰晟 Yusheng Wang 東京大学 2017.9-2019.9修士 2019.9-2022.9博士 |
マイ ゴク チュン Ngoc Trung Mai 東京大学 2016.4-2018.3修士 |
郭 承澈 Seungchul Kwak 東京大学 2014.4-2016.3修士 |
 |
 |
 |
 |
 |
| ドローン | カメラ | 全方位画像からの特徴線検出 |
Yoshiro Hada, Manabu Nakao, Moyuru Yamada, Hiroki Kobayashi, Naoyuki Sawasaki, Katsunori Yokoji, Satoshi Kanai, Fumiki Tanaka, Hiroaki Date, Sarthak Pathak, Atsushi Yamashita, Manabu Yamada and Toshiya Sugawara: "Development of a Bridge Inspection Support System Using Two-Wheeled Multicopter and 3D Modeling Technology", Journal of Disaster Research, Vol. 12, No. 3, pp. 593-606, June 2017. [doi:10.20965/jdr.2017.p0593]
Sarthak Pathak, Alessandro Moro, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Spherical Video Stabilization by Estimating Rotation from Dense Optical Flow Fields", Journal of Robotics and Mechatronics, Vol. 29, No. 3, pp. 566-579, June 2017. (JRM Best Paper Award 2018) [doi:10.20965/jrm.2017.p0566]
Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Optical Flow-based Epipolar Estimation of Spherical Image Pairs for 3D Reconstruction", SICE Journal of Control, Measurement, and System Integration, Vol. 10, No. 5, pp. 476-485, September 2017. [doi:10.9746/jcmsi.10.476]
Binbin Xu, Sarthak Pathak, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Spatio-temporal Video Completion in Spherical Image Sequences", IEEE Robotics and Automation Letters, Vol. 2, No. 4, pp. 2032-2039, October 2017. [doi:10.1109/LRA.2017.2718106] [Video]
後藤 翼, Sarthak Pathak, 池 勇勳, 藤井 浩光, 山下 淳, 淺間 一: "人工物環境における全天球カメラの位置姿勢推定のための直線特徴に基づく3D-2Dマッチング", 精密工学会誌, Vol. 83, No. 12, pp. 1209-1215, December 2017.(精密工学会研究奨励賞受賞)(FA財団論文賞受賞) [doi:10.2493/jjspe.83.1209] [PDF]
野田 純平, Sarthak Pathak, 藤井 浩光, 山下 淳, 淺間 一: "計測点の信頼度を考慮した全天球ステレオカメラの運動推定", 精密工学会誌, Vol. 85, No. 6, pp. 568-576, June 2019. [doi:10.2493/jjspe.85.568] [PDF]
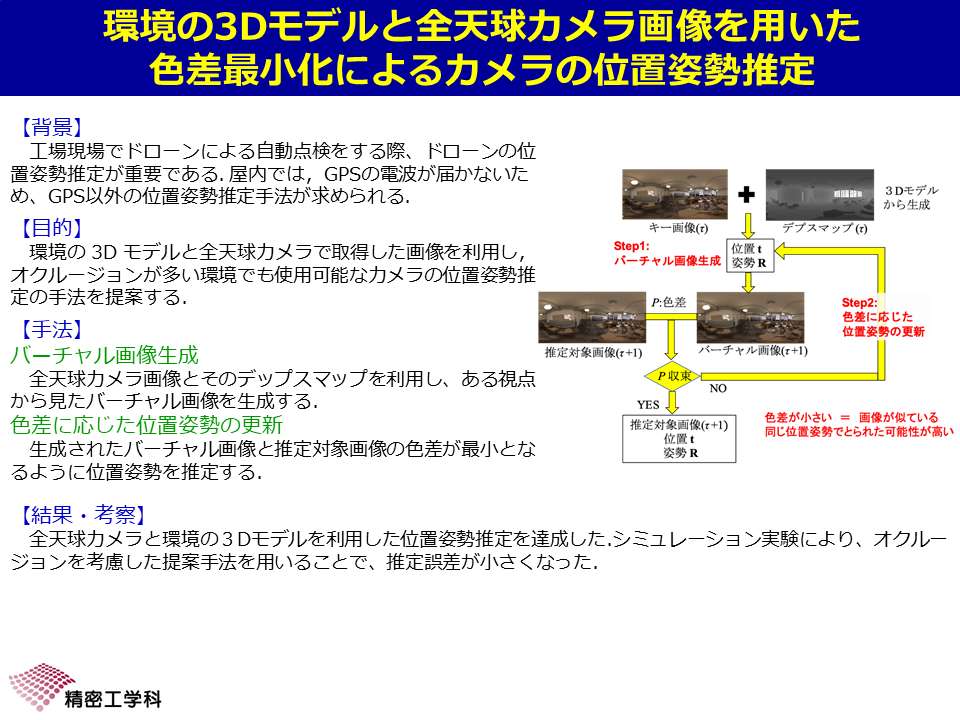
Dabae Kim, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "SelfSphNet: Motion Estimation of a Spherical Camera via Self-Supervised Learning", IEEE Access, Vol. 8, pp. 41847-41859, March 2020. [doi:10.1109/ACCESS.2020.2977109]
陽 東旭, 樋口 寛, Sarthak Pathak, Alessandro Moro, 山下 淳, 淺間 一: "色情報と3次元距離情報に基づく全天球カメラの位置姿勢推定 ーキーフレーム毎のデプスマップ更新による連続位置姿勢推定ー", 精密工学会誌, Vol. 86, No. 12, pp. 1014-1019, December 2020. [doi:10.2493/jjspe.86.1014] [PDF]
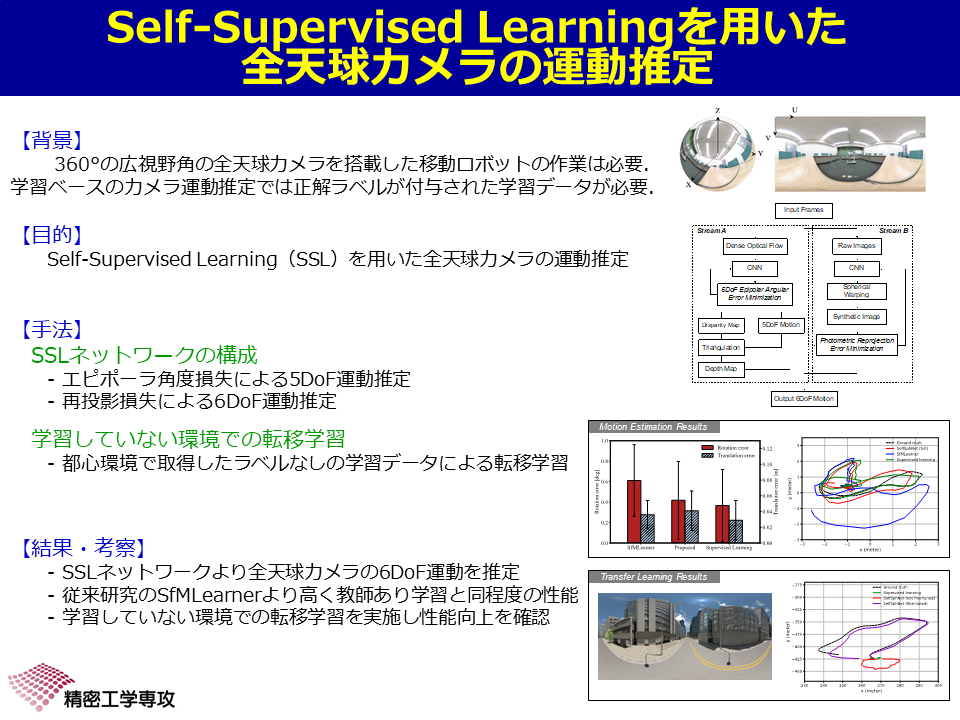
Dabae Kim, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Self-Supervised Optical Flow Derotation Network for Rotation Estimation of a Spherical Camera", Advanced Robotics, Vol. 35, No. 2, pp. 118-128, January 2021. [doi:10.1080/01691864.2020.1857305] [PDF]
Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "A Decoupled Virtual Camera Using Spherical Optical Flow", Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP2016), pp. 4488-4492, Phoenix (USA), September 2016. [doi:10.1109/ICIP.2016.7533209] [PDF] [Video] [bibtex]
Sarthak Pathak, Alessandro Moro, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "3D Reconstruction of Structures using Spherical Cameras with Small Motion", Proceedings of the 16th International Conference on Control, Automation and Systems (ICCAS2016), pp. 117-122, Gyeongju (Korea), October 2016. (Student Best Paper Award) [PDF]
Binbin Xu, Sarthak Pathak, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Optical Flow-based Video Completion in Spherical Image Sequences", Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO2016), pp. 388-395, Qingdao (China), December 2016. [PDF] [Video]
Tsubasa Goto, Sarthak Pathak, Yonghoon Ji, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Spherical Camera Localization in Man-made Environment Using 3D-2D Matching of Line Information", Proceedings of the International Workshop on Advanced Image Technology 2017 (IWAIT2017), Penang (Malaysia), January 2017. (Best Paper Award) [PDF]
Tsubasa Goto, Sarthak Pathak, Yonghoon Ji, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Line-based Global Localization of a Spherical Camera in Manhattan Worlds", Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA2018), pp. 2296-2303, Brisbane (Australia), May 2018. [doi:10.1109/ICRA.2018.8460920] [PDF] [Video1] [Video2]
Sarthak Pathak, Alessandro Moro, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Distortion-Robust Spherical Camera Motion Estimation via Dense Optical Flow", Proceedings of the 2018 IEEE International Conference on Image Processing (ICIP2018), pp. 3358-3362, Athens (Greece), October 2018. [doi:10.1109/ICIP.2018.8451406] [PDF]
Dabae Kim, Sarthak Pathak, Alessandro Moro, Ren Komatsu, Atsushi Yamashita and Hajime Asama: "E-CNN: Accurate Spherical Camera Rotation Estimation via Uniformization of Distorted Optical Flow Fields", Proceedings of the 2019 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP2019), pp. 2232-2236, Brighton (UK), May 2019. [doi:10.1109/ICASSP.2019.8682203] [PDF]
Wanqi Yin, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Accurate All-round 3D Measurement Using Trinocular Spherical Stereo via Weighted Reprojection Error Minimization", Proceedings of the 21st IEEE International Symposium on Multimedia (ISM2019), pp. 86-93, San Diego (USA), December 2019. [doi:10.1109/ISM.2019.00021] [PDF]
Dabae Kim, Sarthak Pathak, Alessandro Moro, 小松 廉, 山下 淳, 淺間 一: "正距円筒オプティカルフローパターンを均等化したE-CNNによる全天球カメラの回転推定の精度向上", 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2018), pp. 2976-2980, 大阪, December 2018.(2019年度計測自動制御学会学術奨励賞技術奨励賞 受賞) [PDF]
Binbin Xu, Sarthak Pathak, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Robot Body Occlusion Removal in Omnidirectional Video Using Color and Shape Information", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
徐 彬斌(指導学生 修士2年), 日本機械学会若手優秀講演フェロー賞 受賞, 2016年06月09日. [賞状] [副賞の楯]
Sarthak Pathak(指導学生 博士3年), 16th International Conference on Control, Automation and Systems (ICCAS2016), Student Best Paper Award 受賞, 2016年10月18日. [賞状]
Tsubasa Goto, Sarthak Pathak, Yonghoon Ji, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Spherical Camera Localization in Man-made Environment Using 3D-2D Matching of Line Information", International Workshop on Advanced Image Technology 2017 (IWAIT2017), Best Paper Award 受賞, 2017年01月10日. [賞状]
後藤 翼, Sarthak Pathak, 池 勇勳, 藤井 浩光, 山下 淳, 淺間 一: "人工物環境における全天球カメラの位置姿勢推定のための直線特徴に基づく3D-2Dマッチング", FA財団論文賞 受賞, 2018年12月14日. [賞状]
Sarthak Pathak, Alessandro Moro, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Spherical Video Stabilization by Estimating Rotation from Dense Optical Flow Fields", JRM Best Paper Award 2018 受賞, 2018年12月17日. [賞状]
Dabae Kim(指導学生 修士2年), 2019年度計測自動制御学会学術奨励賞技術奨励賞 受賞, 2019年2月28日. [賞状] [楯]
 |
 |
 |
| ICAM2015 Honorable Mention | 日本機械学会フェロー賞 | ICCAS2016 Student Best Paper Award |
 |
 |
 |
| IWAIT2017 Best Paper Award | 精密工学会研究奨励賞 | FA財団論文賞 |
 |
 |
| JRM Best Paper Award 2018 | 2019年度計測自動制御学会 学術奨励賞技術奨励賞 |
 |
 |
 |
 |
| 陽 東旭 Dongxu Yang 東京大学 2019.4-2020.3学部 2020.4-2022.3修士 |
殷 琬琪 Wanqi Yin 東京大学 2018.9-2020.9修士 2020.9-2023.9博士 |
金 ダベ Dabae Kim 東京大学 2018.4-2020.3修士 |
野田 純平 Junpei Noda 東京大学 2017.4-2018.3学部 2018.4-2020.3修士 |
 |
 |
 |
|
| 後藤 翼 Tsubasa Goto 東京大学 2016.4-2018.3修士 |
徐 彬斌 Binbin Xu 東京大学 2014.10-2015.3研究生 2015.4-2017.3修士 |
Sarthak Pathak 東京大学 2014.10-2017.9博士 2017.9博士取得 2017.10-2018.3 特任研究員 2018.4-2020.3 学振特別研究員 2020.4-2021.3 特任助教 |
 |
 |
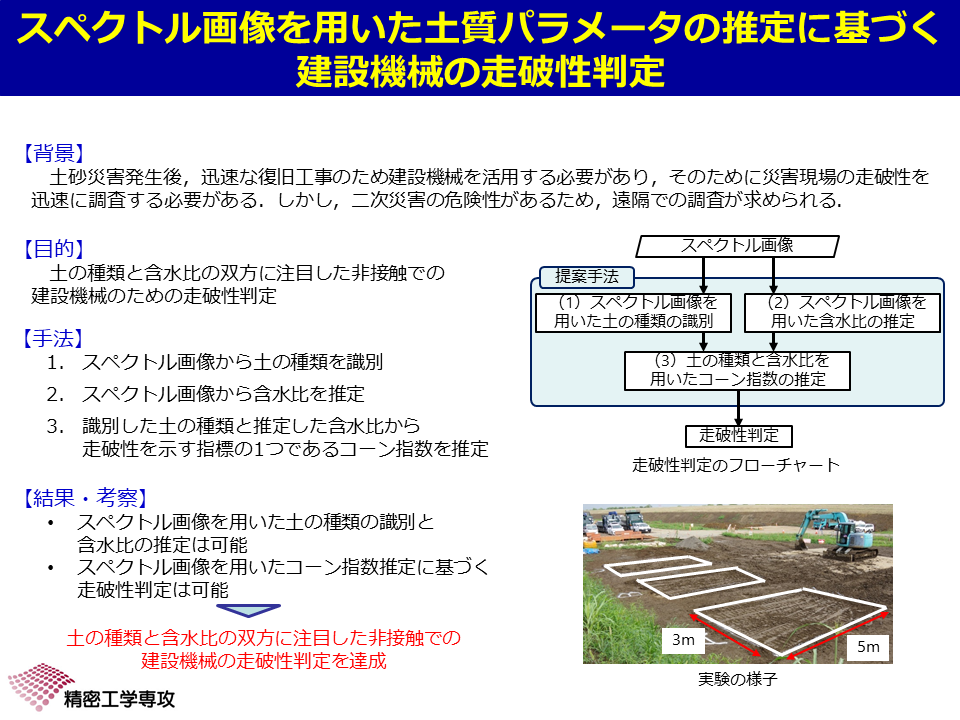
筑紫 彰太, 山内 統広, 田村 雄介, 山川 博司, 永谷 圭司, 藤井 浩光, 千葉 拓史, 山本 新吾, 茶山 和博, 山下 淳, 淺間 一: "スペクトル画像を用いた土質パラメータの推定に基づく建設機械の走破性判定", 精密工学会誌, Vol. 86, No. 12, pp. 1057-1063, December 2020. (精密工学会髙城賞受賞) [doi:10.2493/jjspe.86.1057] [PDF]
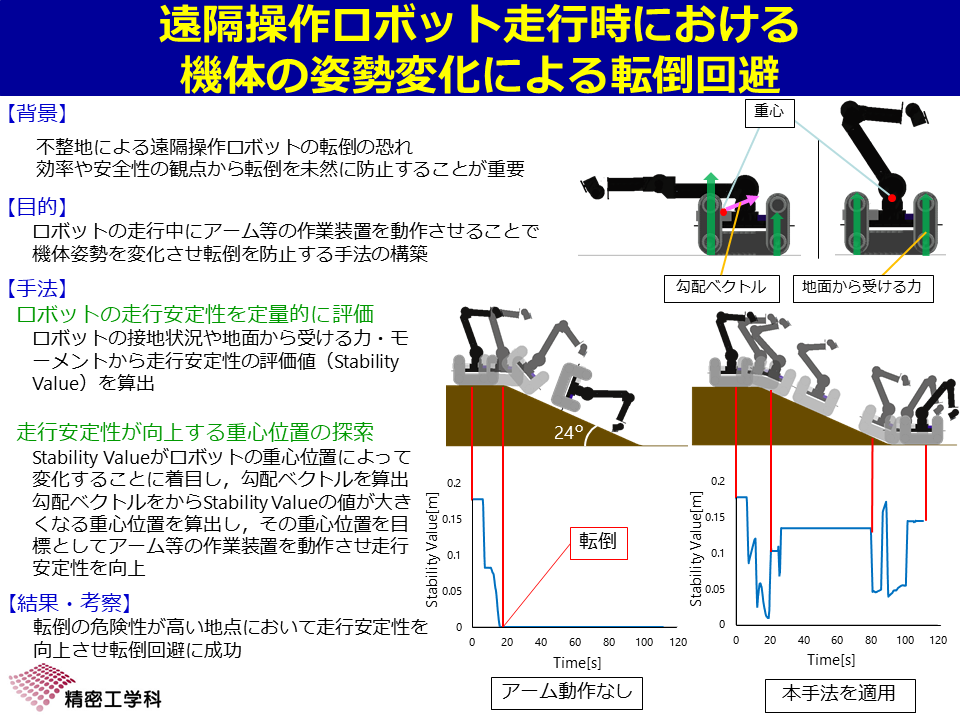
水野 秀哉, 筑紫 彰太, 藤井 浩光, 田村 雄介, 永谷 圭司, 山下 淳, 淺間 一: "遠隔操作ロボット走行時における機体の姿勢変化による転倒回避", 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2018), pp. 1680-1683, 大阪, December 2018. (SI2018優秀講演賞 受賞) [PDF]
水野 秀哉, 筑紫 彰太, 藤井 浩光, 田村 雄介, 永谷 圭司, 山下 淳, 淺間 一: "遠隔操作ロボット走行時における機体の姿勢変化による転倒回避", 第19回計測自動制御学会システムインテグレーション部門講演会(SI2018), SI2018優秀講演賞 受賞, 2019年03月05日. [賞状]
筑紫 彰太, 山内 統広, 田村 雄介, 山川 博司, 永谷 圭司, 藤井 浩光, 千葉 拓史, 山本 新吾, 茶山 和博, 山下 淳, 淺間 一: "スペクトル画像を用いた土質パラメータの推定に基づく建設機械の走破性判定", 精密工学会髙城賞 受賞, 2021年03月17日. [賞状の楯] [賞状の部分]
 |
 |
| SI2018優秀講演賞 |
精密工学会髙城賞 |
 |
 |
 |
 |
 |
| 日浦 愛子 Aiko Hiura 東京大学 2021.4-2022.3学部 |
高宮 秀徳 Hidenori Takamiya 東京大学 2021.4-2022.3学部 2022.4-2024.3修士 |
杉山 大地 Daichi Sugiyama 東京大学 2019.4-2021.3学部 |
山内 統広 Norihiro Yamauchi 東京大学 2018.4-2020.3修士 |
水野 秀哉 Shuya Mizuno 東京大学 2018.4-2019.3学部 |
 |
 |
 |
 |
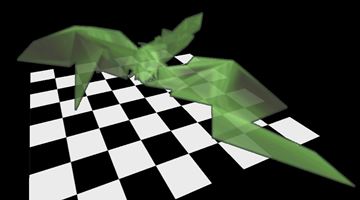 |
| オーロラ画像1 | オーロラ画像2 | 3次元計測・可視化結果 |
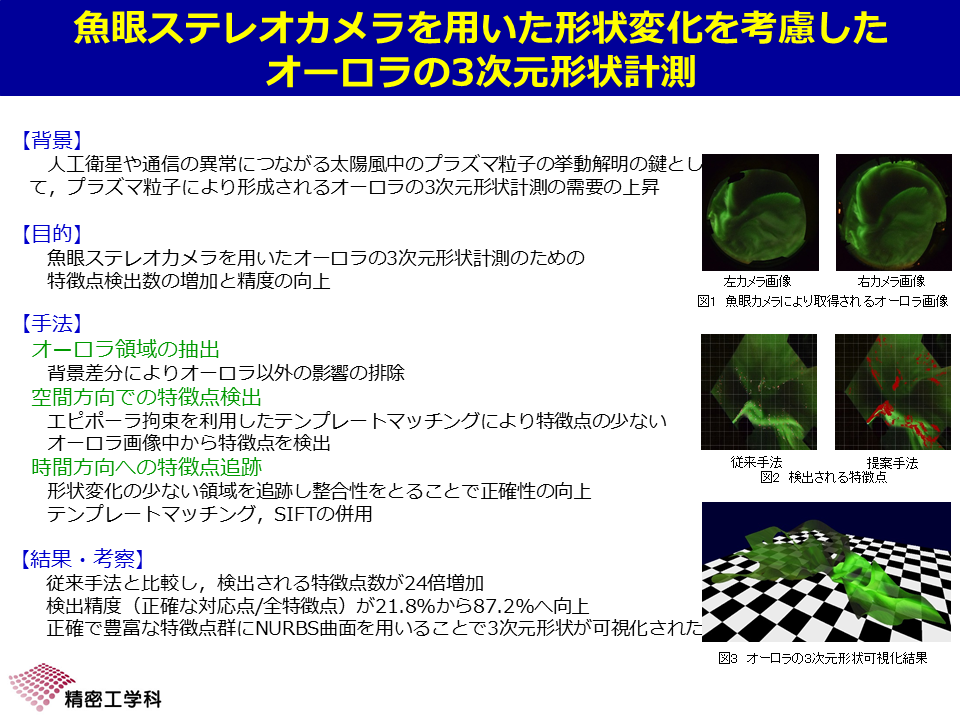
Ryuho Kataoka, Yoshizumi Miyoshi, Kai Shigematsu, Donald Hampton, Yoshiki Mori, Takayuki Kubo, Atsushi Yamashita, Masayuki Tanaka, Toshiyuki Takahei, Taro Nakai, Hiroko Miyahara and Kazuo Shiokawa: "Stereoscopic Determination of All-sky Altitude Map of Aurora Using Two Ground-based Nikon DSLR Cameras", Annales Geophysicae, Vol. 31, No. 9, pp. 1543-1548, September 2013. [doi:10.5194/angeo-31-1543-2013]
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "魚眼ステレオカメラを用いた全天周時系列画像からのオーロラ3次元計測", 日本機械学会論文集, Vol. 82, No. 834, 15-00428, pp. 1-17, February 2016.(日本機械学会賞(論文)受賞) [doi:10.1299/transjsme.15-00428] [PDF]
Yoshiki Mori, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Toru Kaneko, Masatoshi Okutomi and Hajime Asama: "Calibration of Fish-Eye Stereo Camera for Aurora Observation", Proceedings of the International Workshop on Advanced Image Technology 2013 (IWAIT2013), pp. 729-734, Nagoya (Japan), January 2013. (Candidate for Best Paper Award) [PDF]
Hiromitsu Fujii, Takayuki Kubo, Atsushi Yamashita, Akira Takeuchi, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Masatoshi Okutomi and Hajime Asama: "Aurora 3D-Measurement and Visualization Using Fish-Eye Stereo Camera", Proceedings of ACM SIGGRAPH Asia 2014 Posters, Article 24, Shenzhen (China), December 2014. [doi:10.1145/2668975.2669011] [PDF] [Link]
Akira Takeuchi, Hiromitsu Fujii, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Masatoshi Okutomi and Hajime Asama: "3D Visualization of Aurora from Optional Viewpoint at Optional Time", Proceedings of ACM SIGGRAPH Asia 2015 Posters, Article 9, Kobe (Japan), November 2015. [doi:10.1145/2820926.2820967] [PDF] [Video]
Akira Takeuchi, Hiromitsu Fujii, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Masatoshi Okutomi and Hajime Asama: "3D Visualization of Aurora Considering the Physical Characteristics", Proceedings of ACM SIGGRAPH Asia 2016 Posters, Article 52, pp. 1-2, Macao (China), December 2016. [doi:10.1145/3005274.3005285] [PDF] [Video]
久保 尭之, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "魚眼ステレオカメラを用いたオーロラの3次元計測と可視化", 第14回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2013), pp. 1111-1114, 神戸, December 2013.(SI2013優秀講演賞 受賞) [PDF]
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "オーロラの3次元計測のための形状変化を考慮した特徴点追跡", 第20回ロボティクスシンポジア講演予稿集, pp. 18-24, 軽井沢, March 2015.(査読付) [PDF]
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "3地点魚眼画像による特徴点の誤検出除去を用いたオーロラの3次元ステレオ計測", 第21回ロボティクスシンポジア講演予稿集, pp. 332-337, 長崎, March 2016.(査読付) [PDF]
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "複数視点魚眼映像によるオーロラの発生原理を考慮した3次元形状計測と可視化", 第22回ロボティクスシンポジア講演予稿集, pp. 48-55, 群馬, March 2017.(査読付) (計測自動制御学会 システムインテグレーション部門 部門研究奨励賞 および 若手奨励賞 受賞) [PDF]
Yoshiki Mori, Atsushi Yamashita, Masayuki Tanaka, Ryuho Kataoka, Yoshizumi Miyoshi, Toru Kaneko, Masatoshi Okutomi: "Calibration of Fish-Eye Stereo Camera for Aurora Observation", International Workshop on Advanced Image Technology 2013 (IWAIT2013), Nominated as Candidates for IWAIT2013 Best Paper Award, 2013年1月8日. [IWAIT2013HP]
久保 尭之, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "魚眼ステレオカメラを用いたオーロラの3次元計測と可視化", 第14回計測自動制御学会システムインテグレーション部門講演会(SI2013), SI2013優秀講演賞, 2013年12月20日. [賞状]
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "複数視点魚眼映像によるオーロラの発生原理を考慮した3次元形状計測と可視化", 計測自動制御学会 システムインテグレーション部門 部門研究奨励賞 受賞, 2017年12月21日. [賞状]
竹内 彰(指導学生 2016年度修士修了), 計測自動制御学会 システムインテグレーション部門 若手奨励賞 受賞, 2017年12月21日.
竹内 彰, 藤井 浩光, 山下 淳, 田中 正行, 片岡 龍峰, 三好 由純, 奥富 正敏, 淺間 一: "魚眼ステレオカメラを用いた全天周時系列画像からのオーロラ3次元計測", 日本機械学会賞(論文) 受賞, 2018年04月19日. [賞状] [副賞のメダル(表)] [副賞のメダル(裏)]
 |
 |
 |
| SI2013優秀講演賞 | SICE SI部門 研究奨励賞 | 日本機械学会賞(論文) |
 |
 |
 |
| 竹内 彰 Akira Takeuchi 東京大学 2014.4-2015.3学部 2015.4-2017.3修士 |
久保 尭之 Takayuki Kubo 東京大学 2012.4-2014.3学部 |
森 祥樹 Yoshiki Mori 静岡大学 2011.4-2012.3学部 2012.4-2014.3修士 |
 |
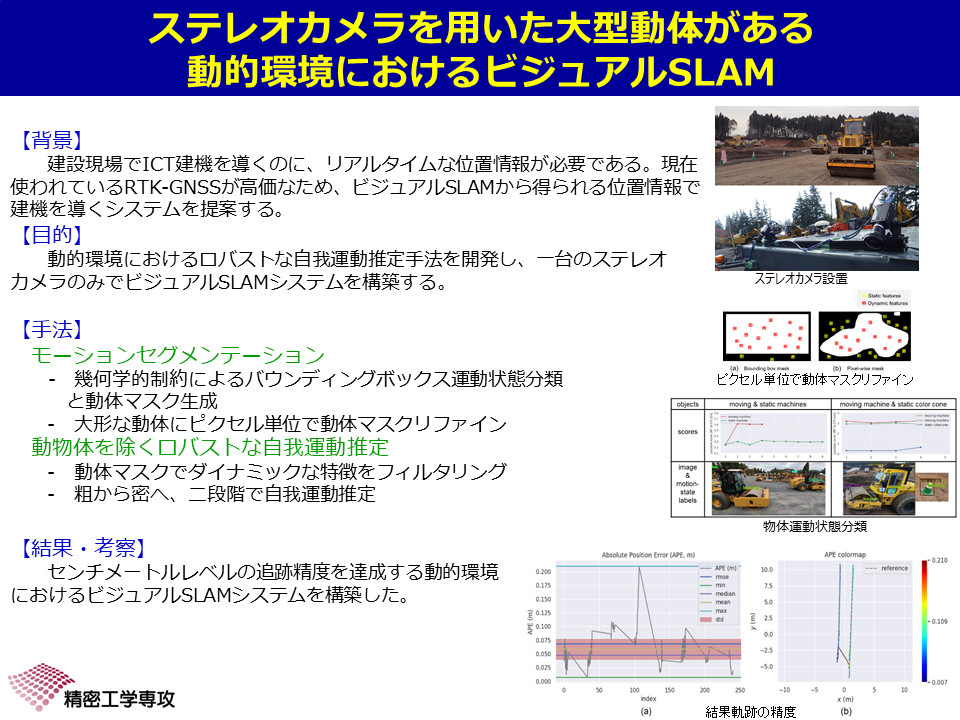 |
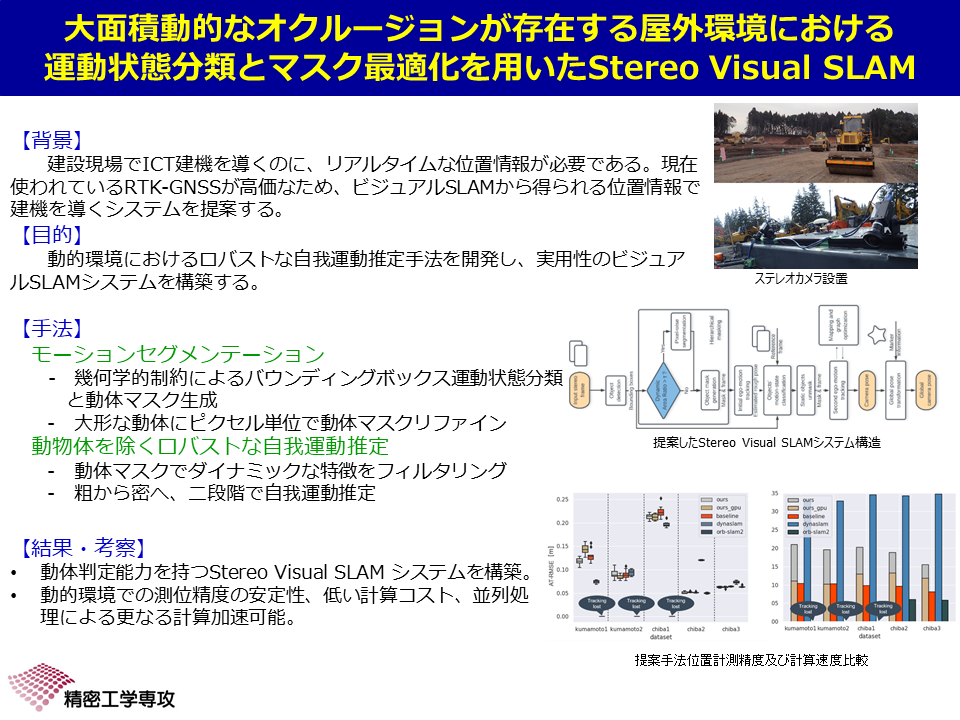
Runqiu Bao, Ren Komatsu, Renato Miyagusuku, Masaki Chino, Atsushi Yamashita and Hajime Asama: "Stereo Camera Visual SLAM with Hierarchical Masking and Motion-state Classification at Outdoor Construction Sites Containing Large Dynamic Objects", Advanced Robotics, Vol. 35, No. 3-4, pp. 228-241, February 2021. [doi:10.1080/01691864.2020.1869586]
 |
 |
 |
 |
| 太田 薫平 Kumpei Ota 東京大学 2021.4-2024.3博士 |
千野 雅紀 Masaki Chino 東京大学 2021.4-2024.3博士 |
マイ ゴク チュン Ngoc Trung Mai 東京大学 2020.9-2023.9博士 |
包 潤秋 Runqiu Bao 東京大学 2018.9-2020.9修士 2020.9-2023.9博士 |
 |
 |
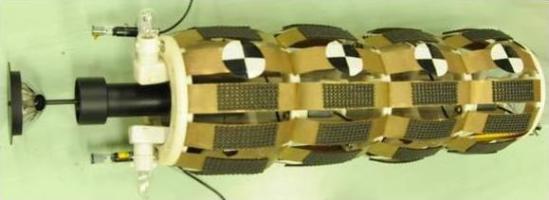 |
| ミミズ型ロボット(中央大学中村太郎研究室と共同研究) |
松井 建樹, 山下 淳, 金子 透: "全方位レーザ・全方位カメラからなるレンジファインダの自己位置推定と配管の3次元モデル生成", 電気学会論文誌C, Vol. 130, No. 9, pp. 1504-1512, September 2010. [doi:10.1541/ieejeiss.130.1504] [PDF]
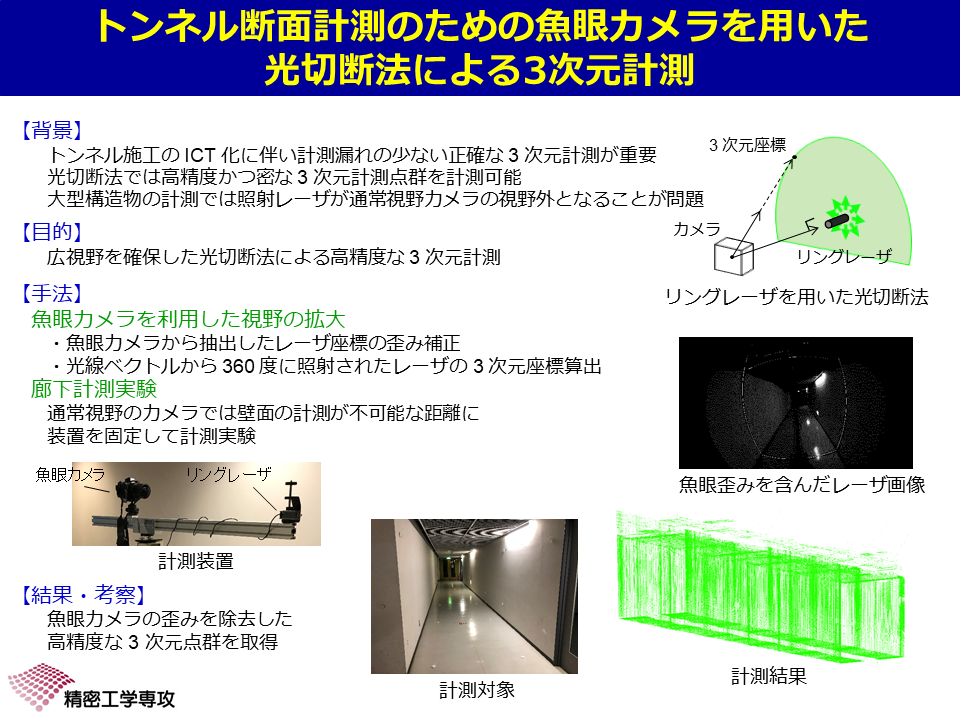
樋口 寛, 藤井 浩光, 谷口 敦史, 渡辺 正浩, 山下 淳, 淺間 一: "全周ラインレーザとカメラを用いた大型構造物内部の三次元計測", 日本ロボット学会誌, Vol. 36, No. 3, pp. 222-232, April 2018. [doi:10.7210/jrsj.36.222]
Hiroshi Higuchi, Hiromitsu Fujii, Atsushi Taniguchi, Masahiro Watanabe, Atsushi Yamashita and Hajime Asama: "3D Measurement of Large Structure by Multiple Cameras and a Ring Laser", Journal of Robotics and Mechatronics, Vol. 31, No. 2, pp. 251-262, April 2019. [doi:10.20965/jrm.2019.p0251]
Mikihiro Ikura, Sarthak Pathak, Jun Younes Louhi Kasahara, Atsushi Yamashita and Hajime Asama: "AdjustSense: Adaptive 3D Sensing System with Adjustable Spatio-temporal Resolution and Measurement Range Using High-speed Omnidirectional Camera and Direct Drive Motor", Sensors, Vol. 21, No. 21, 6975, pp. 1-18, October 2021. [doi:10.3390/s21216975]
伊賀上 卓也, 樋口 寛, 井倉 幹大, 吉田 健一, 伊藤 哲, 谷口 信博, 山下 淳, 淺間 一: "リングレーザ照射光の2D-3Dマッチングに基づく光切断法によるトンネル内部の3次元計測", 精密工学会誌, Vol. 87, No. 12, pp. 987-994, December 2021. [doi:10.2493/jjspe.87.987] [PDF]
井倉 幹大, 宮下令央, 山下 淳, 石川 正俊, 淺間 一: "高速点滅LEDマーカと複数のRGB-Dセンサを用いた遮蔽領域を提示可能な任意視点重畳映像生成システム", 精密工学会誌, Vol. 88, No.3, March 2022.
Kenki Matsui, Atsushi Yamashita and Toru Kaneko: "3-D Shape Measurement of Pipe by Range Finder Constructed with Omni-Directional Laser and Omni-Directional Camera", Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA2010), pp. 2537-2542, Anchorage (USA), May 2010. [doi:10.1109/ROBOT.2010.5509851] [PDF] [Video] [bibtex]
Atsushi Yamashita, Kenki Matsui, Ryosuke Kawanishi, Toru Kaneko, Taro Murakami, Hayato Omori, Taro Nakamura and Hajime Asama: "Self-Localization and 3-D Model Construction of Pipe by Earthworm Robot Equipped with Omni-Directional Rangefinder", Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO2011), pp. 1017-1023, Phuket Island (Thailand), December 2011. [doi:10.1109/ROBIO.2011.6181421] [PDF]
Momoko Kawata, Hiroshi Higuchi, Hiromitsu Fujii, Atsushi Taniguchi, Masahiro Watanabe, Atsushi Yamashita and Hajime Asama: "Acceleration of 3D Measurement of Large Structures with Ring Laser and Camera via FFT-based Template Matching", Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII2019), pp. 11-16, Paris (France), January 2019. [doi:10.1109/SII.2019.8700345] [PDF]
Momoko Kawata, Hiroshi Higuchi, Sarthak Pathak, Atsushi Yamashita and Hajime Asama: "Scale Optimization of Structure from Motion for Structured Light-based All-round 3D Measurement", Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC2021), pp. 442-449, October 2021. [PDF]
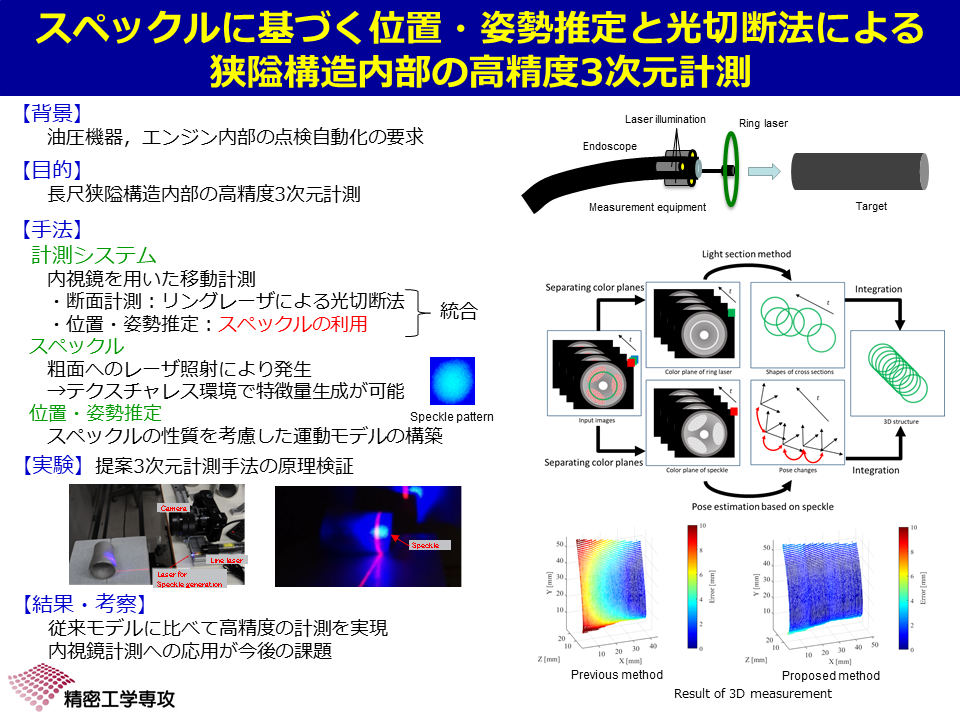
樋口 寛, 藤井 浩光, 谷口 敦史, 渡辺 正浩, 山下 淳, 淺間 一: "テクスチャレス環境の3次元計測のための奥行情報を考慮したスペックル移動推定", 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2018), pp. 2706-2711, 大阪, December 2018. (SI2018優秀講演賞 受賞) [PDF]
樋口 寛, 藤井 浩光, 谷口 敦史, 渡辺 正浩, 山下 淳, 淺間 一: "テクスチャレス環境の3次元計測のための奥行情報を考慮したスペックル移動推定", 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2018), SI2018優秀講演賞 受賞, 2019年03月05日. [賞状]
 |
| SI2018優秀講演賞 |
 |
 |
 |
 |
| 速水 桃子 Toko Hayamizu 東京大学 2021.4-2022.3修士 |
井倉 幹大 Mikihiro Ikura 東京大学 2020.4-2023.3博士 |
伊賀上 卓也 Takuya Igaue 東京大学 2020.4-2022.3修士 2022.4-2025.3博士 |
川田 桃子 Momoko Kawata 東京大学 2018.4-2020.3修士 |
 |
 |
||
| 樋口 寛 Hiroshi Higuchi 東京大学 2015.4-2016.3学部 2016.4-2018.3修士 2018.4-2022.9博士 |
松井 建樹 Kenki Matsui 静岡大学 2008.4-2009.3学部 2009.4-2011.3修士 |
 |
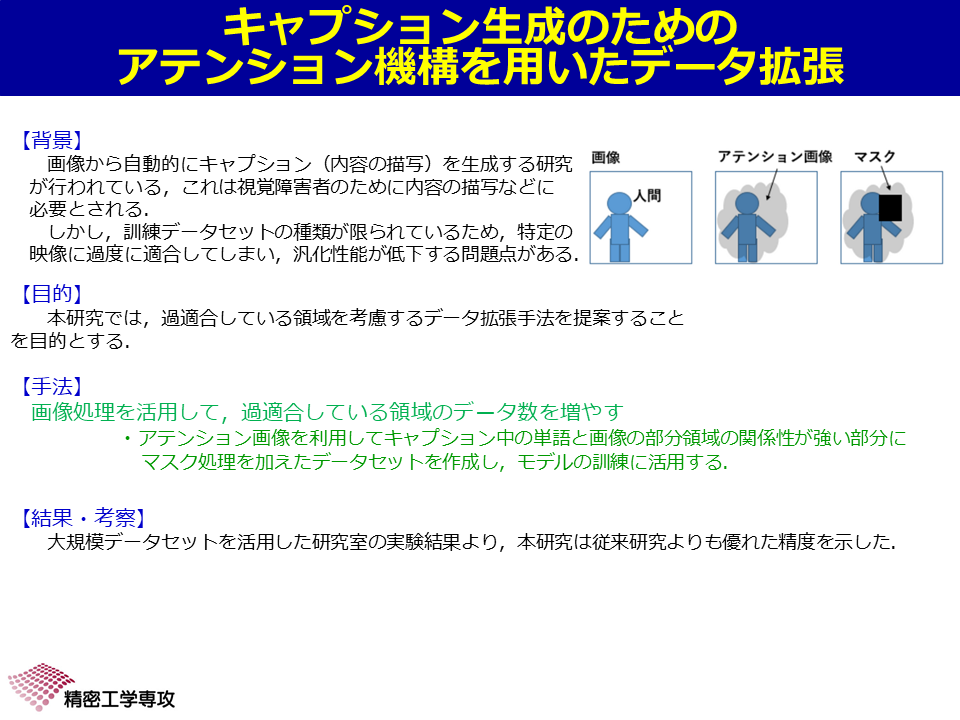 |
岩村 紀与彦, ルイ笠原 純ユネス, モロ アレッサンドロ, 山下 淳, 淺間 一: "アテンション機構を用いたクロップとマスクによるキャプション生成のためのデータ拡張", 精密工学会誌, Vol. 86, No. 11, pp. 904-910, November 2020. [doi:10.2493/jjspe.86.904] [PDF]
後藤 拓矢, 中野 宏毅, 山下 淳, 淺間 一: "CT画像における複数スライスを用いた小疾病領域検出", 精密工学会誌, Vol. 86, No. 12, pp. 1020-1025, December 2020. [doi:10.2493/jjspe.86.1020] [PDF]
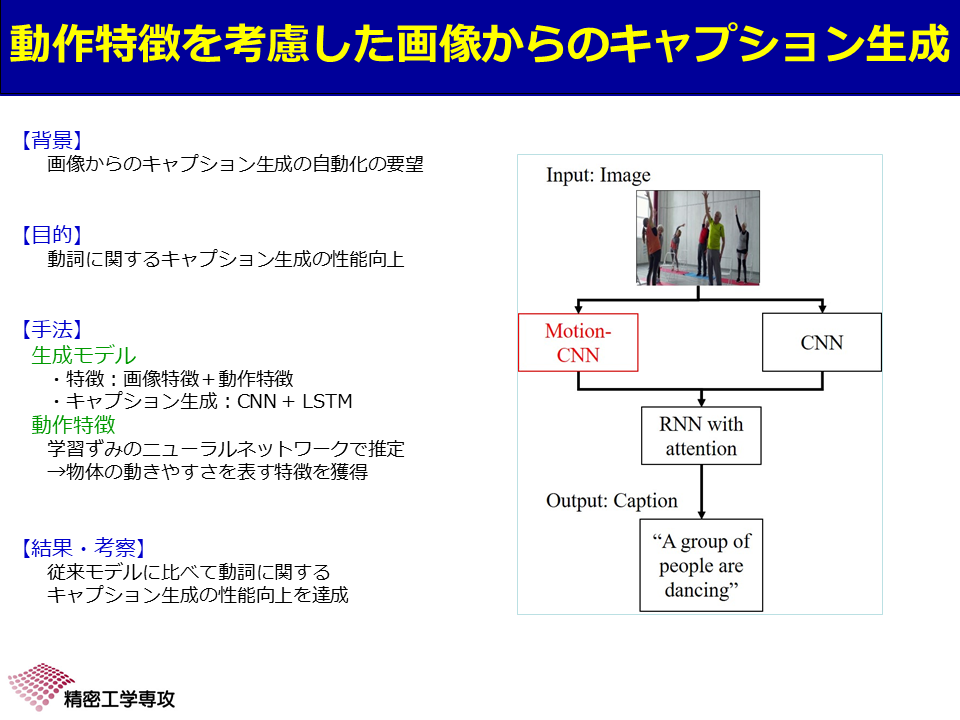
Kiyohiko Iwamura, Jun Younes Louhi Kasahara, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Image Captioning Using Motion-CNN with Object Detection", Sensors, Vol. 21, No. 4, 1270, pp. 1-13, February 2021. [doi:10.3390/s21041270]
ルイ笠原 純ユネス, 沈 鎭赫, 小松 廉, 筑紫 彰太, 永谷 圭司, 千葉 拓史, 山本 新吾, 茶山 和博, 山下 淳, 淺間 一: "シミュレータで作成された訓練データのデータ拡張による油圧ショベルの動作認識", 精密工学会誌, Vol. 88, No. 2, February 2022.
Kiyohiko Iwamura, Jun Younes Louhi Kasahara, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Potential of Incorporating Motion Estimation for Image Captioning", Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII2021), pp. 23-28, January 2021. (SICE International Young Authors Award (SIYA-SII2021)) [PDF]
岩村 紀与彦(指導学生 博士3年), SICE International Young Authors Award for SII2021 (SIYA-SII2021) 受賞, 2021年01月14日. [賞状]
 |
| SIYA-SII2021 |
 |
 |
 |
 |
 |
| 上野 将輝 Masaki Ueno 東京大学 2021.4-2022.3学部 |
竹内 優介 Yusuke Takeuchi 東京大学 2019.9-2023.9博士 |
後藤 拓矢 Takuya Goto 東京大学 2019.4-2022.9博士 |
沈 鎭赫 Jinhyeok Sim 東京大学 2019.4-2021.3修士 |
岩村 紀与彦 Kiyohiko Iwamura 東京大学 2018.9-2021.9博士 2021.9博士取得 |
 |
 |
 |
| 移動ロボットの性能に応じた走行可能性推定 |
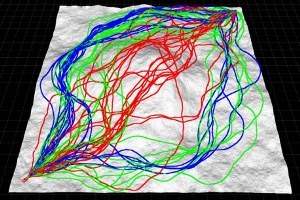 |
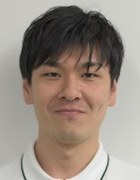
| 屋外不整地での動作計画結果 |
田中 佑典, 池 勇勳, 山下 淳, 淺間 一: "移動ロボットの性能に応じた走行可能性推定が可能な不整地に対する走行可能性推定および行動生成手法", 精密工学会誌, Vol. 81, No. 12, pp. 1119-1126, December 2015. [doi:10.2493/jjspe.81.1119] [PDF]
Yonghoon Ji, Yusuke Tanaka, Yusuke Tamura, Mai Kimura, Atsushi Umemura, Yoshiharu Kaneshima, Hiroki Murakami, Atsushi Yamashita and Hajime Asama: "Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs", IEEE Transactions on Industrial Informatics, Vol. 15, No. 1, pp. 599-611, January 2019. [doi:10.1109/TII.2018.2870662]
Ryosuke Yajima, Shinya Katsuma, Makoto Suzuki, Fumiya Matsushita, Shunsuke Hamasaki, Pang-jo Chun, Keiji Nagatani, Genki Yamauchi, Takeshi Hashimoto, Atsushi Yamashita, Hajime Asama and Kazumasa Ozawa: "Development of An Excavator-avoidance System for Buried Pipes", Advanced Robotics, Vol. 35, No. 23, pp. 1468-1483, December 2021. [doi:10.1080/01691864.2021.2007167]
Yusuke Tanaka, Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Fuzzy Based Traversability Analysis for a Mobile Robot on Rough Terrain", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp. 3965-3970, Seattle (USA), May 2015. [doi:10.1109/ICRA.2015.7139753] [PDF] [Video] [bibtex]
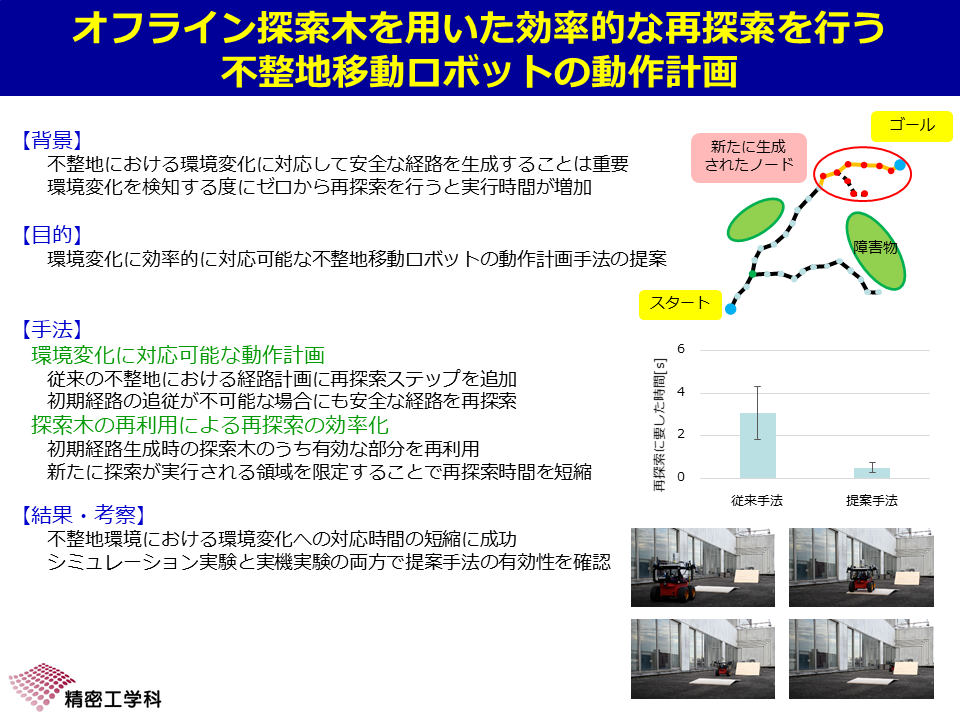
Yuki Doi, Yonghoon Ji, Yusuke Tamura, Yuki Ikeda, Atsushi Umemura, Yoshiharu Kaneshima, Hiroki Murakami, Atsushi Yamashita and Hajime Asama: "Robust Path Planning against Pose Errors for Mobile Robots in Rough Terrain", Advances in Intelligent Systems and Computing 867, Intelligent Autonomous Systems 15 (Marcus Strand, Rudiger Dillmann, Emanuele Menegatti and Stefano Ghidoni (Eds.)) (Proceedings of the 15th International Conference IAS-15, Baden-Baden (Germany), June 2018), Springer, pp. 27-39, January 2019. [doi:10.1007/978-3-030-01370-7_3] [PDF]
Shinya Katsuma, Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Efficient Motion Planning for Mobile Robots Dealing with Changes in Rough Terrain", Preprints of the 1st IFAC Workshop on Robot Control (WROCO2019), pp. 460-463, Daejeon (Korea), September 2019. (IFAC PaperOnLine, Vol. 52, No. 22, pp. 83-86, September 2019) [doi:10.1109/10.1016/j.ifacol.2019.11.052] [PDF]
Shinya Katsuma, Ryosuke Yajima, Shunsuke Hamasaki, Pang-Jo Chun, Keiji Nagatani, Genki Yamauchi, Takeshi Hashimoto, Atsushi Yamashita and Hajime Asama: "Excavation Path Generation for Autonomous Excavator Considering Bulking Factor of Soil", Proceedings of the 37th International Symposium on Automation and Robotics in Construction (ISARC2020), pp. 578-583, October 2020. [doi:10.22260/ISARC2020/0080] [PDF]
田中 佑典, 池 勇勳, 河野 仁, 田村 雄介, 江本 周平, 板野 肇, 村上 弘記, 山下 淳, 淺間 一: "複数台移動ロボットによる環境計測結果に基づいた不整地走行のための移動ロボットの進路方向決定手法の構築", 第21回ロボティクスシンポジア講演予稿集, pp. 250-255, 長崎, March 2016.(査読付) [PDF]
田中 佑典, 池 勇勳, 田村 雄介, 木村 麻衣, 梅村 篤志, 金島 義治, 村上 弘記, 山下 淳, 淺間 一: "3次元環境地図を用いた不整地走行無人車両の経路計画", 第22回ロボティクスシンポジア講演予稿集, pp. 203-204, 群馬, March 2017.(査読付) [PDF]
 |
 |
 |
 |
| 桂 知弘 Tomohiro Katsura 東京大学 2021.4-2022.3学部 2022.4-2024.3修士 |
勝間 慎弥 Shinya Katsuma 東京大学 2018.4-2019.3学部 2019.4-2021.3修士 |
土居 悠輝 Yuki Doi 東京大学 2017.4-2018.3学部 |
田中 佑典 Yusuke Tanaka 東京大学 2014.4-2015.3学部 2015.4-2017.3修士 |
 |
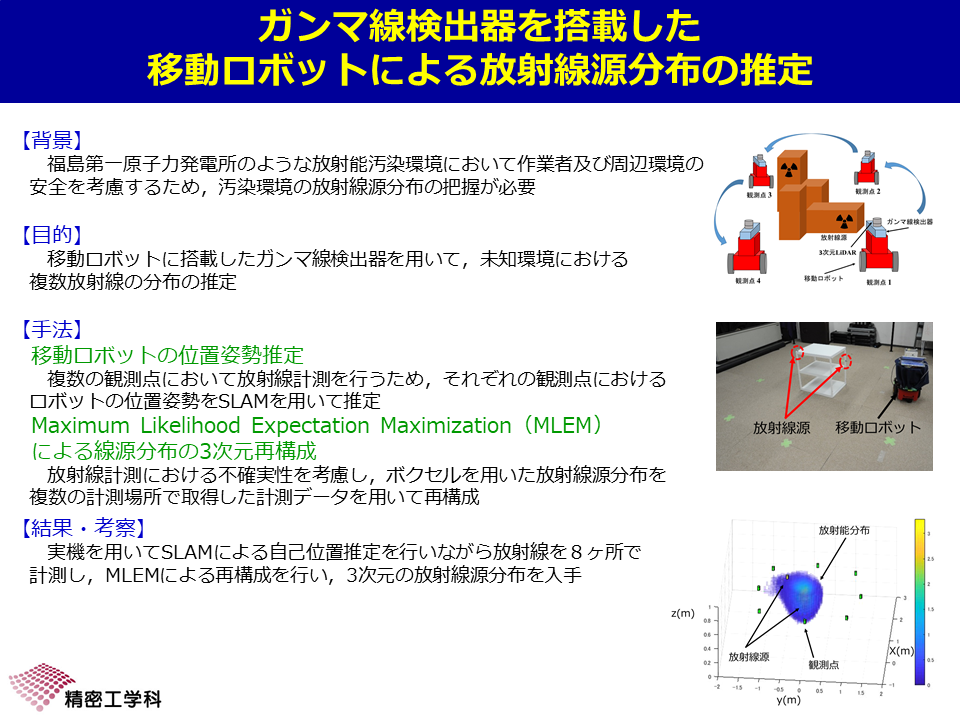 |
Doyeon Kim, Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Effect of Detector Pose Uncertainty in Localization of Radiation Sources", E-Journal of Advanced Maintenance, Vol. 9, No. 2, pp. 97-103, August 2017. [Link]
Takuya Kishimoto, Hanwool Woo, Ren Komatsu, Yusuke Tamura, Hideki Tomita, Kenji Shimazoe, Atsushi Yamashita and Hajime Asama: "Path Planning for Localization of Radiation Sources Based on Principal Component Analysis", Applied Sciences, Vol. 11, No. 10, 4707, pp. 1-22, May 2021. [doi:10.3390/app11104707]
Hao Xu, Ren Komatsu, Hanwool Woo, Atsushi Yamashita and Hajime Asama: "Leakage Position Estimation of Cooling Water Using a Stereo Camera for Fukushima Daiichi Nuclear Power Plant", Applied Sciences, Vol. 11, No. 17, 7796, pp. 1-15, August 2021. [doi:10.3390/app11177796]
Ziheng Chao, Ren Komatsu, Hanwool Woo, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Radiation Distribution Estimation with Non-directional Detector Using Plane Source Model", Advanced Robotics, Vol. 36, 2022. [doi:10.1080/01691864.2021.2016482]
 |
 |
 |
 |
 |
| 藤田 勇人 Hayato Fujita 東京大学 2021.4-2023.3修士 |
劉 浩翔 Haoxiang Liu 東京大学 2021.4-2023.3修士 |
包 宛鑫 Wanxin Bao 東京大学 2020.9-2022.9修士 |
晁 子恒 Ziheng Chao 東京大学 2020.4-2022.3修士 |
藤野 裕太郎 Yutaro Fujino 東京大学 2020.4-2021.3学部 2021.4-2023.3修士 |
 |
 |
 |
||
| 徐 浩 Hao Xu 東京大学 2019.4-2021.3修士 |
岸本 卓也 Takuya Kishimoto 東京大学 2018.4-2019.3学部 2019.4-2021.3修士 |
金 度演 Doyeon Kim 東京大学 2016.4-2018.3修士 |
 |
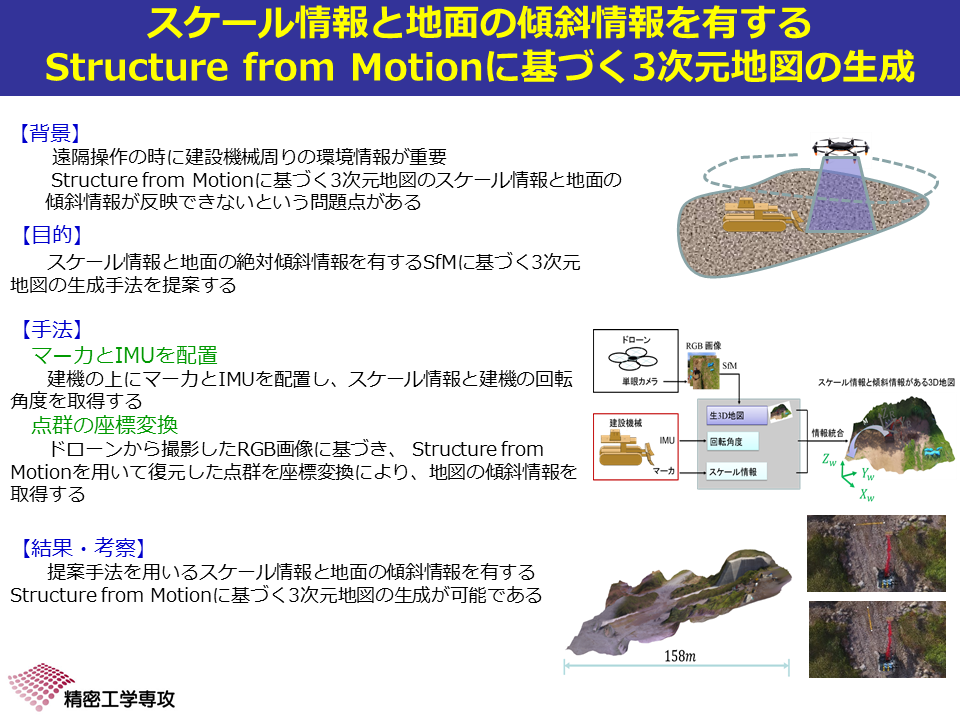 |
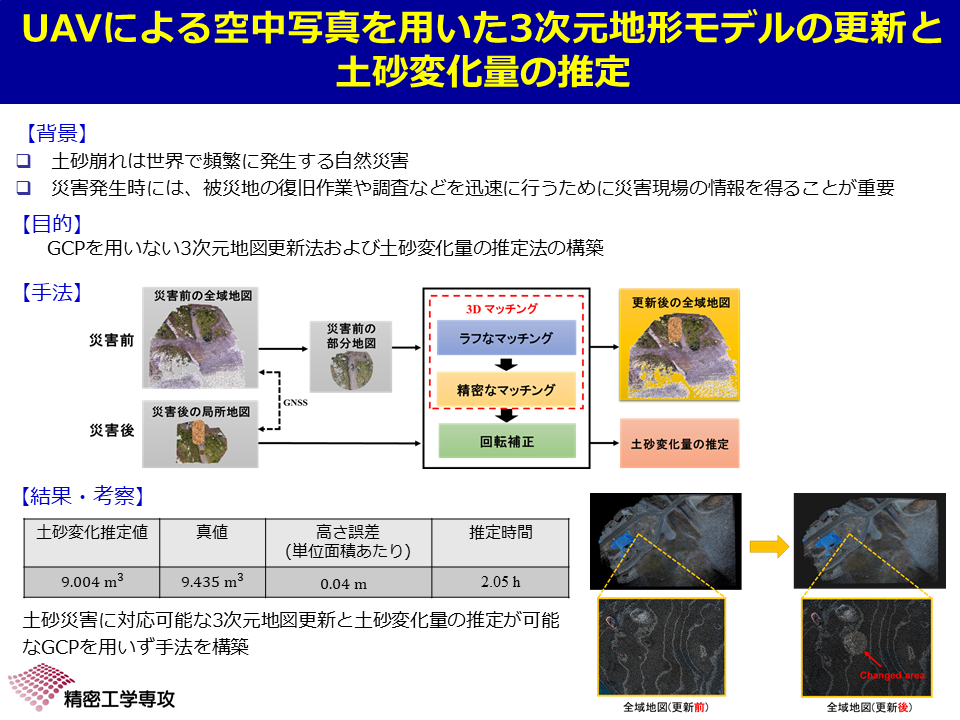
Yuyang Shao, Yonghoon Ji, Hiromitsu Fujii, Keiji Nagatani, Atsushi Yamashita and Hajime Asama: "Estimation of Scale and Slope Information for Structure from Motion-based 3D Map", Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII2017), pp. 208-213, Taipei (Taiwan), December 2017. [doi:10.1109/SII.2017.8279213] [PDF]
Yuyang Shao, Yonghoon Ji, Hiromitsu Fujii, Shingo Yamamoto, Takumi Chiba, Kazuhiro Chayama, Yusuke Tamura, Keiji Nagatani, Atsushi Yamashita and Hajime Asama: "Estimation of Soil Volume Change Using UAV-based 3D Terrain Mapping", 計測自動制御学会システム・情報部門学術講演会2017講演論文集(SSI2017), pp. 247-250, 浜松, November 2017. [PDF]
 |
| 邵 宇陽 Yuyang Shao 東京大学 2016.4-2018.3修士 |
 |
 |
|
| 歩行者の行動のモデル化:狭い場所で道を譲る行動の発現 |
 |
|
| 移動ロボットのナビゲーション 左図:ロボットが移動している様子.右図:ロボット周囲の拡大図 |
田村 雄介, 濱崎 峻資, 山下 淳, 淺間 一: "環境に応じた人間の移動予測に基づく移動ロボットの人物回避", 日本機械学会論文集(C編), Vol. 79, No. 799, pp. 617-628, March 2013. [doi:10.1299/kikaic.79.617] [PDF]
熊原 渉, 増山 岳人, 田村 雄介, 山下 淳, 淺間 一: "局所経路情報と歩行者流情報を用いた移動ロボットナビゲーション手法", 精密工学会誌, Vol. 79, No. 4, pp. 349-355, April 2013. [doi:10.2493/jjspe.79.349] [PDF]
熊原 渉, 増山 岳人, 田村 雄介, 山下 淳, 淺間 一: "動的環境下における歩行者流を利用した移動ロボットナビゲーション", 計測自動制御学会論文集, Vol. 50, No. 1, pp. 58-67, January 2014. [doi:10.9746/sicetr.50.58] [PDF]
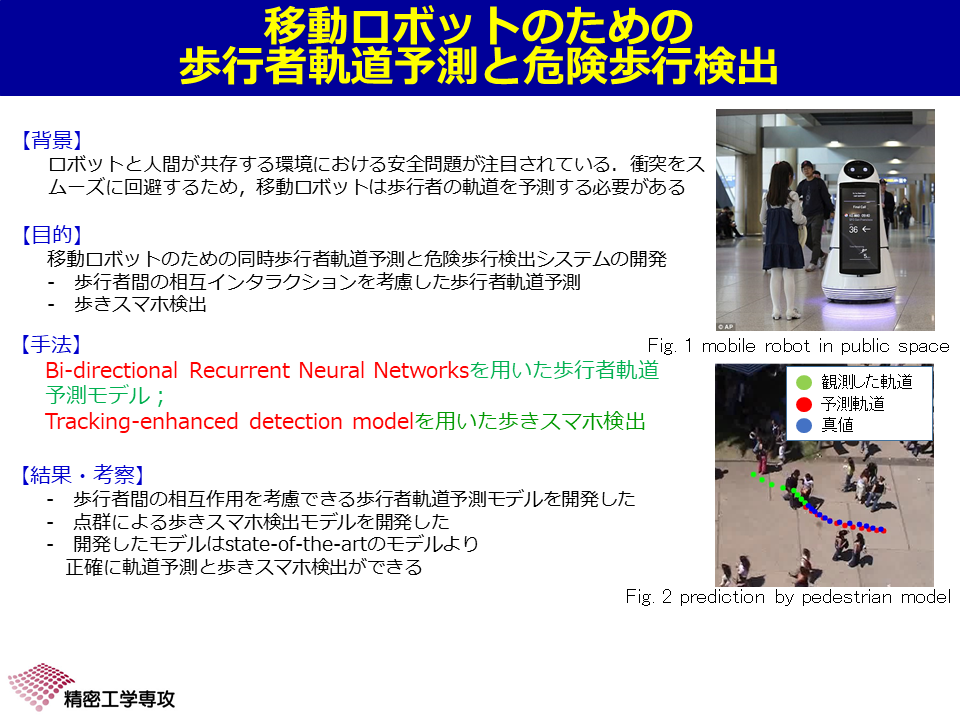
Jiaxu Wu, Hanwool Woo, Yusuke Tamura, Alessandro Moro, Stefano Massaroli, Atsushi Yamashita and Hajime Asama: "Pedestrian Trajectory Prediction Using BiRNN Encoder-Decoder Framework ", Advanced Robotics, Vol. 33, No. 18, pp. 956-969, September 2019. [doi:10.1080/01691864.2019.1635910]
Jiaxu Wu, Yusuke Tamura, Yusheng Wang, Hanwool Woo, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Smartphone Zombie Detection from LiDAR Point Cloud for Mobile Robot Safety", IEEE Robotics and Automation Letters, Vol. 5, No. 2, pp. 2256-2263, April 2020. [doi:10.1109/LRA.2020.2970570] [Video]
Yusuke Tamura, Phuoc Dai Le, Kentarou Hitomi, Naiwala P. Chandrasiri, Takashi Bando, Atsushi Yamashita and Hajime Asama: "Development of Pedestrian Behavior Model Taking Account of Intention", Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), pp. 382-387, Vilamoura (Portugal), October 2012. [doi:10.1109/IROS.2012.6385599] [PDF]
Naoki Ibe, Gakuto Masuyama, Atsushi Yamashita and Hajime Asama: "Humanlike Behavior Model with Probabilistic Intention", Proceedings of ACM SIGGRAPH2013 Posters, Article 7, Anaheim (USA), July 2013. [doi:10.1145/2503385.2503393] [PDF] [Video]
呉 家旭, Hanwool Woo, 田村 雄介, Alessandro Moro, Stefano Massaroli, 山下 淳, 淺間 一: "BiRNNを用いたアテンションモデルによる歩行者軌道予測", 第24回ロボティクスシンポジア講演予稿集, pp. 65-68, 黒部, March 2019.(査読付) (若手奨励賞 受賞) [PDF]
呉 家旭(指導学生 修士2年), 計測自動制御学会 システムインテグレーション部門 若手奨励賞 受賞, 2019年12月13日. [賞状]
 |
| 計測自動制御学会 SI部門 若手奨励賞 |
 |
 |
 |
 |
 |
| 呉 家旭 Jiaxu Wu 東京大学 2018.4-2020.3修士 2022.4-2025.3博士 |
伊部 直樹 Naoki Ibe 東京大学 2012.4-2013.3学部 2013.4-2015.3修士 |
熊原 渉 Wataru Kumahara 東京大学 2011.4-2013.3修士 |
濱崎 峻資 Shunsuke Hamasaki 東京大学 2010.4-2013.3修士 |
レーフック ダイ Phuoc Dai Le 東京大学 2011.4-2012.3学部 |
 |
 |
 |
 |
| 水面の画像 | 補正した画像 | 3次元計測結果 |
 |
 |
|
| 水陸両用ロボット (NEDOプロジェクトで東芝と研究開発) |
ロボットによる水中センシングの様子 |
山下 淳, 林本 悦一, 金子 透: "レーザレンジファインダを用いた水中物体の3次元形状計測", 日本機械学会論文集(C編), Vol. 72, No. 717, pp. 1506-1513, May 2006. [doi:10.1299/kikaic.72.1506] [PDF]
山下 淳, 樋口 裕和, 金子透: "光切断法による水中物体の3次元計測", 精密工学会誌, Vol. 73, No. 2, pp. 265-269, February 2007. [doi:10.2493/jjspe.73.265] [PDF]
成瀬 達哉, 山下 淳, 金子 透, 小林 祐一: "魚眼ステレオカメラを用いた水中物体の3次元計測", 精密工学会誌, Vol. 79, No. 4, pp. 344-348, April 2013. [doi:10.2493/jjspe.79.344] [PDF]
伊部 公紀, 山下 淳, 金子 透, 小林 祐一: "マニピュレータに搭載したレーザレンジファインダを用いた透明容器中の液中物体の3次元形状計測", 映像情報メディア学会誌, Vol. 67, No. 11, pp. J379-J387, November 2013. [doi:10.3169/itej.67.J379] [PDF]
伊部 公紀, 小林 祐一, 金子 透, 山下 淳: "複光路単眼ステレオによる直方体容器中の水中物体の3次元計測", 精密工学会誌, Vol. 81, No. 12, pp. 1093-1101, December 2015.(精密工学会論文賞受賞)(FA財団論文賞受賞) [doi:10.2493/jjspe.81.1093] [PDF]
Xiaorui Qiao, Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Visibility Enhancement for Underwater Robot based on an Improved Underwater Light Model", Journal of Robotics and Mechatronics, Vol. 30, No. 5, pp. 781-790, October 2018. [doi:10.20965/jrm.2018.p0781]
Xiaorui Qiao, Atsushi Yamashita and Hajime Asama: "Underwater Structure from Motion for Cameras under Refractive Surfaces", Journal of Robotics and Mechatronics, Vol. 31, No. 4, pp. 603-611, August 2019. [doi:10.20965/jrm.2019.p0603]
Atsushi Yamashita, Etsukazu Hayashimoto, Toru Kaneko and Yoshimasa Kawata: "3-D Measurement of Objects in a Cylindrical Glass Water Tank with a Laser Range Finder", Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2003), pp. 1578-1583, Las Vegas (USA), October 2003. [doi:10.1109/IROS.2003.1248869] [PDF] [bibtex]
Atsushi Yamashita, Hirokazu Higuchi, Toru Kaneko and Yoshimasa Kawata: "Three Dimensional Measurement of Object's Surface in Water Using the Light Stripe Projection Method", Proceedings of the 2004 IEEE International Conference on Robotics and Automation (ICRA2004), pp. 2736-2741, New Orleans (USA), April 2004. [doi:10.1109/ROBOT.2004.1307474] [PDF] [bibtex]
Atsushi Yamashita, Shinsuke Ikeda and Toru Kaneko: "3-D Measurement of Objects in Unknown Aquatic Environments with a Laser Range Finder", Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA2005), pp. 3923-3928, Barcelona (Spain), April 2005. [doi:10.1109/ROBOT.2005.1570718] [PDF] [bibtex]
Atsushi Yamashita, Susumu Kato and Toru Kaneko: "Robust Sensing against Bubble Noises in Aquatic Environments with a Stereo Vision System", Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA2006), pp. 928-933, Orlando (USA), May 2006. [doi:10.1109/ROBOT.2006.1641828] [PDF] [bibtex]
Atsushi Yamashita, Megumi Fujii and Toru Kaneko: "Color Registration of Underwater Images for Underwater Sensing with Consideration of Light Attenuation", Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA2007), pp. 4570-4575, Rome (Italy), April 2007. [doi:10.1109/ROBOT.2007.364183] [PDF] [bibtex]
Atsushi Yamashita, Akira Fujii and Toru Kaneko: "Three Dimensional Measurement of Objects in Liquid and Estimation of Refractive Index of Liquid by Using Images of Water Surface with a Stereo Vision System", Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA2008), pp. 974-979, Pasadena (USA), May 2008. [doi:10.1109/ROBOT.2008.4543331] [PDF] [bibtex]
Ryohei Kawai, Atsushi Yamashita and Toru Kaneko: "Three-Dimensional Measurement of Objects in Water by Using Space Encoding Method", Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA2009), pp. 2830-2835, Kobe (Japan), May 2009. [doi:10.1109/ROBOT.2009.5152430] [PDF] [Video] [bibtex]
Atsushi Yamashita, Yudai Shirane and Toru Kaneko: "Monocular Underwater Stereo -3D Measurement Using Difference of Appearance Depending on Optical Paths-", Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2010), pp. 3652-3657, Taipei (Taiwan), October 2010. [doi:10.1109/IROS.2010.5649444] [PDF]
Kazuki Sakamoto, Alessandro Moro, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Three-Dimensional Measurement of Objects in Liquid with an Unknown Refractive Index Using Fisheye Stereo Camera", Proceedings of the 2014 IEEE/SICE International Symposium on System Integration (SII2014), pp. 281-286, Tokyo (Japan), December 2014. [doi:10.1109/SII.2014.7028051] [PDF]
Xiaorui Qiao, Atsushi Yamashita and Hajime Asama: "3D Reconstruction for Underwater Investigation at Fukushima Daiichi Nuclear Power Station Using Refractive Structure from Motion", International Topical Workshop on Fukushima Decommissioning Research (FDR2019), FDR2019-1006, pp. 1-4, Fukushima (Japan), May 2019. (FDR2019 Selected Paper) [PDF]
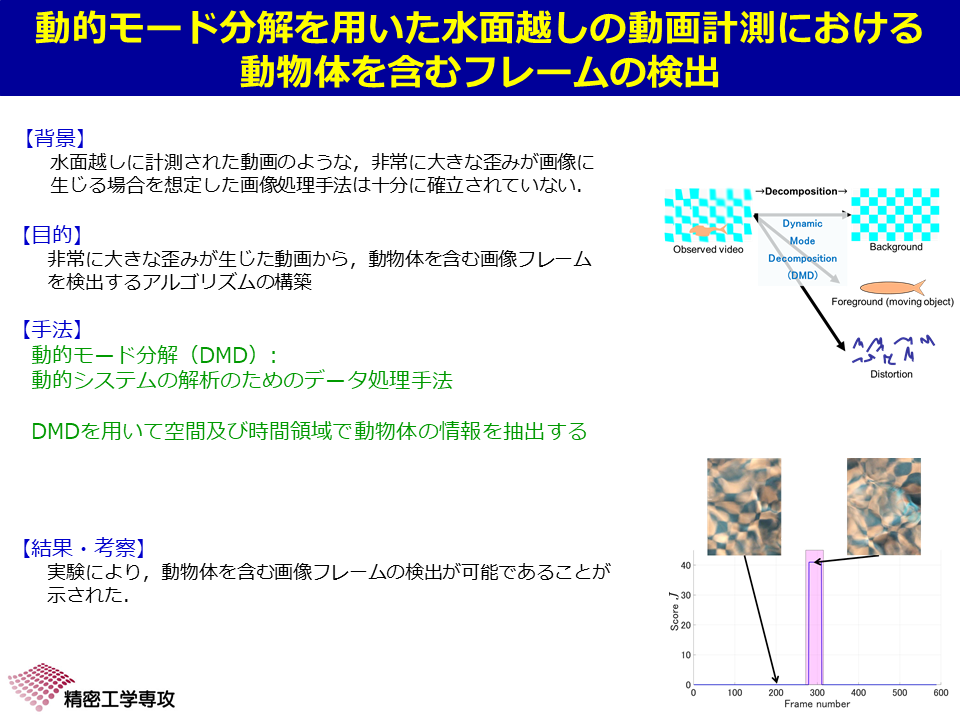
Daisuke Uchida, Atsushi Yamashita and Hajime Asama: "Detecting Image Frames which Contain a Moving Object from a Severely Distorted Video Stream Using Dynamic Mode Decomposition", Proceedings of SPIE, Vol. 11515 (Proceedings of the International Workshop on Advanced Image Technology 2020 (IWAIT2020)), pp. 1151510-1-1151510-6, Yogyakarta (Indonesia), January 2020. [doi:10.1117/12.2566797] [PDF]
鈴木 陸実(指導学生 学部4年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2007年2月24日. [賞状]
河井 良平(指導学生 修士2年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2010年2月27日. [賞状]
南川 豊浩(指導学生 学部4年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2011年2月19日. [賞状] [トロフィー]
伊部 公紀(指導学生 博士3年), 映像情報メディア学会 優秀研究発表賞 受賞, 2012年12月18日. [賞状] [副賞の楯]
坂本 一樹(指導学生 学部4年), 動的画像処理実利用化ワークショップDIA2013 研究奨励賞次点, 2013年3月7日. [DIA2013HP]
伊部 公紀, 小林 祐一, 金子 透, 山下 淳: "複光路単眼ステレオによる直方体容器中の水中物体の3次元計測", 2015年度精密工学会論文賞 受賞, 2016年3月16日. [賞状] [副賞の楯]
伊部 公紀, 小林 祐一, 金子 透, 山下 淳: "複光路単眼ステレオによる直方体容器中の水中物体の3次元計測", FA財団論文賞 受賞, 2016年12月09日. [賞状]
Xiaorui Qiao, Atsushi Yamashita and Hajime Asama: "3D Reconstruction for Underwater Investigation at Fukushima Daiichi Nuclear Power Station Using Refractive Structure from Motion", FDR2019 Selected Paper, 2019年09月25日.
 |
 |
 |
 |
| 電気学会優秀論文発表賞 | ITEメディア 優秀発表賞 |
ITEメディア 優秀発表賞 |
ITEメディア 優秀発表賞 |
 |
 |
 |
| 映像情報メディア学会 優秀研究発表賞 |
精密工学会論文賞 | FA財団論文賞 |
 |
 |
 |
 |
 |
| 喬 暁蕊 Xiaorui Qiao 東京大学 2013.10-2016.9博士 (満期修了) 2019.3博士取得 |
坂本 一樹 Kazuki Sakamoto 東京大学 2012.4-2013.3学部 2013.4-2015.3修士 |
伊部 公紀 Hirotoshi Ibe 静岡大学 2007.4-2014.3博士 2014.3博士取得 |
成瀬 達哉 Tatsuya Naruse 静岡大学 2011.4-2012.3学部 2012.4-2014.3修士 |
原田 真里 Masato Harata 静岡大学 2011.4-2012.3学部 |
 |
 |
 |
 |
 |
| 平野 太一朗 Taichiro Hirano 静岡大学 2010.4-2011.3学部 |
南川 豊浩 Toyohiro Minamigawa 静岡大学 2010.4-2011.3学部 |
纐纈 理志 Tadashi Koketsu 静岡大学 2008.4-2009.3学部 2009.4-2011.3修士 |
山田 孝司 Koji Yamada 静岡大学 2008.4-2009.3学部 2009.4-2011.3修士 |
河井 良平 Ryohei Kawai 静岡大学 2007.4-2008.3学部 2008.4-2010.3修士 |
 |
 |
 |
 |
 |
| 白根 裕大 Yudai Shirane 静岡大学 2007.4-2008.3学部 |
鈴木 陸実 Mutsumi Suzuki 静岡大学 2006.4-2007.3学部 |
藤井 めぐみ Megumi Fujii 静岡大学 2005.4-2006.3学部 |
藤井 彰 Akira Fujii 静岡大学 2004.4-2005.3学部 |
加藤 進 Susumu Kato 静岡大学 2003.4-2004.3学部 2004.4-2006.3修士 |
 |
 |
 |
||
| 池田 真輔 Shinsuke Ikeda 静岡大学 2002.4-2003.3学部 2003.4-2005.3修士 |
樋口 裕和 Hirokazu Higuchi 静岡大学 2002.4-2003.3学部 |
林本 悦一 Etsukazu Hayashimoto 静岡大学 2002.4-2003.3学部 |
 |
 |
 |
 |
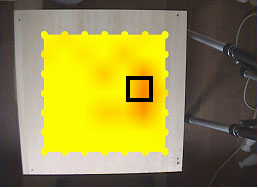
| 打音検査の結果 | (赤色:分厚い部分,黄色:薄い部分) |
 |
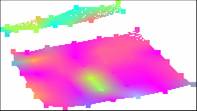 |
| 実際の様子 | 打音検査結果 |
山下 淳, 原 隆浩, 金子 透: "画像処理と音響処理の融合による打音検査", 日本機械学会論文集(C編), Vol. 72, No. 715, pp. 772-779, March 2006. [doi:10.1299/kikaic.72.772] [PDF]
藤井 浩光, 山下 淳, 淺間 一: "打診検査のためのブースティングを用いた自動状態識別", 精密工学会誌, Vol. 80, No. 9, pp. 844-850, September 2014.(精密工学会研究奨励賞受賞) [doi:10.2493/jjspe.80.844] [PDF]
藤井 浩光, 山下 淳, 淺間 一: "打音検査のための自動校正機能を備えた自動変状診断アルゴリズム", 日本機械学会論文集, Vol. 82, No. 834, 15-00426, pp. 1-18, February 2016.(日本機械学会賞(論文)受賞) [doi:10.1299/transjsme.15-00426] [PDF]
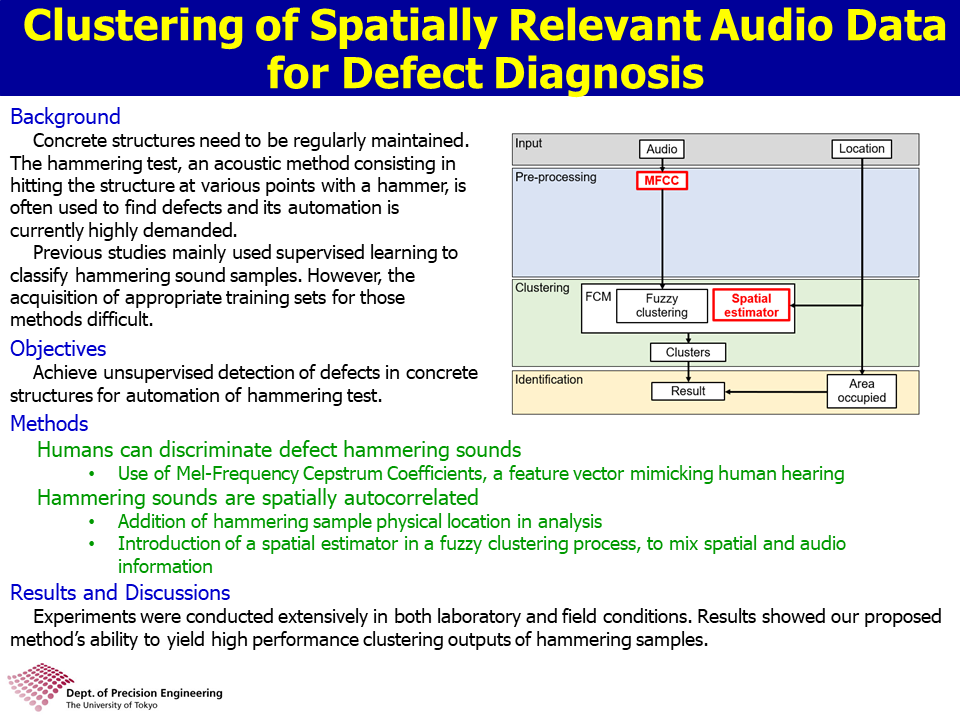
Jun Younes Louhi Kasahara, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Unsupervised Learning Approach to Automation of Hammering Test Using Topological Information", ROBOMECH Journal, Vol. 4, 13, pp. 1-10, May 2017. [doi:10.1186/s40648-017-0081-7]
Jun Younes Louhi Kasahara, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Fuzzy Clustering of Spatially Relevant Acoustic Data for Defect Detection", IEEE Robotics and Automation Letters, Vol. 3, No. 3, pp. 2616-2623, July 2018. [doi:10.1109/LRA.2018.2820178]
Satoru Nakamura, Atsushi Yamashita, Fumihiro Inoue, Daisuke Inoue, Yusuke Takahashi, Nobukazu Kamimura and Takao Ueno: "Inspection Test of a Tunnel with the Inspection Vehicle for Tunnel Lining Concrete", Journal of Robotics and Mechatronics, Vol. 31, No. 6, pp. 762-771, December 2019. [doi:10.20965/jrm.2019.p0762]
高橋 悠輔, 前原 聡, 藤井 浩光, 山下 淳: "人の音に近い打音装置を使った変状検出手法", 日本ロボット学会誌, Vol. 38, No. 1, pp. 113-118, January 2020. [doi:10.7210/jrsj.38.113]
Jun Younes Louhi Kasahara, Atsushi Yamashita and Hajime Asama: "Acoustic Inspection of Concrete Structures Using Active Weak Supervision and Visual Information", Sensors, Vol. 20, No. 3, 629, pp. 1-15, February 2020. [doi:10.3390/s20030629]
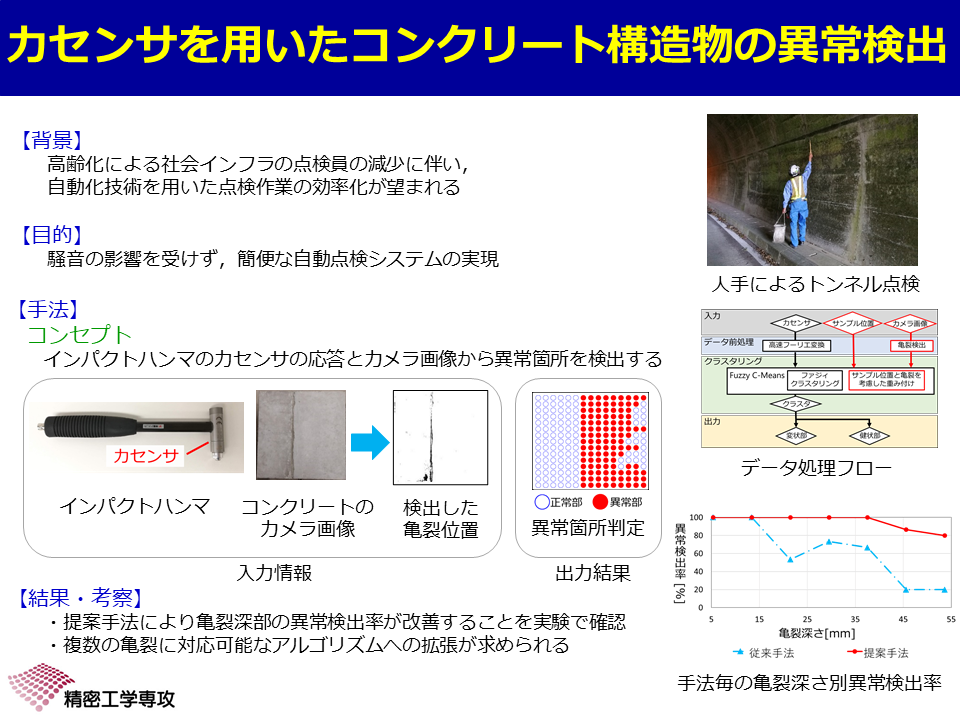
ルイ笠原 純ユネス, 湊 真司, モロ アレッサンドロ, 禹 ハンウル, 山下 淳, 淺間 一: "力センサとカメラのセンサフュージョンに基づいたコンクリート構造物の欠陥検出", 精密工学会誌, Vol. 86, No. 12, pp. 975-981, December 2020. [doi:10.2493/jjspe.86.975] [PDF]
Jun Younes Louhi Kasahara, Atsushi Yamashita and Hajime Asama: "Multiple Oracle Consensus for Weakly Supervised Defect Detection in Concrete Structures Using Audio Data", Advanced Robotics, Vol. 35, No. 3-4, pp. 219-227, February 2021. [doi:10.1080/01691864.2020.1861977]
Jun Younes Louhi Kasahara, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Weakly Supervised Acoustic Defect Detection in Concrete Structures Using Clustering-based Augmentation", IEEE/ASME Transactions on Mechatronics, Vol. 26, No. 6, pp. 2826-2834, December 2021. [doi:10.1109/TMECH.2021.3077496]
Atsushi Yamashita, Takahiro Hara and Toru Kaneko: "Inspection of Visible and Invisible Features of Objects with Image and Sound Signal Processing", Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2006), pp. 3837-3842, Beijing (China), October 2006. [doi:10.1109/IROS.2006.281790] [PDF]
Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Automated Diagnosis of Material Condition in Hammering Test Using a Boosting Algorithm", Proceedings of the 2014 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO2014), pp. 101-107, Evanston (USA), September 2014. [doi:10.1109/ARSO.2014.7020988] [PDF] [Video]
Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Improvement of Environmental Adaptivity of Defect Detector for Hammering Test Using Boosting Algorithm", Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), pp. 6507-6514, Hamburg (Germany), October 2015. [doi:10.1109/IROS.2015.7354307] [PDF] [Video] [bibtex]
Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Defect Detection with Estimation of Material Condition Using Ensemble Learning for Hammering Test", Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA2016), pp. 3847-3854, Stockholm (Sweden), May 2016. (IEEE Robotics and Automation Society Japan Joint Chapter Young Award) [doi:10.1109/ICRA.2016.7487573] [PDF] [Video]
Jun Younes Louhi Kasahara, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Complementarity of Sensors and Weak Supervision for Defect Detection in Concrete Structures", Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII2020), pp. 1-6, Honolulu (USA), January 2020. (Best Paper Award) [doi:10.1109/SII46433.2020.9026304] [PDF]
林 鍾勳, 藤井 浩光, 山下 淳, 淺間 一: "視覚センサおよび聴覚センサを用いたコンクリートひび割れの侵入方向の検出", 映像情報メディア学会技術報告, Vol. 41, No. 4, pp. 85-87, 横浜, February 2017. [PDF]
Louhi Kasahara Jun Younes, Miyagusuku Renato, Fujii Hiromitsu, Yamashita Atsushi and Asama Hajime: "Substituting Spatial by Temporal Information in Clustering of Audio Data for Defect Diagnosis", 2018年度精密工学会春季大会学術講演会講演論文集, pp. 259-260, 東京, March 2018.(ベストプレゼンテーション賞 受賞) [PDF]
湊 真司, ルイ笠原 純ユネス, モロ アレッサンドロ, 禹 ハンウル, 藤井 浩光, 山下 淳, 淺間 一: "力センサとカメラからのマルチモーダルデータに基づいたコンクリート構造物の変状検出", 動的画像処理実利用化ワークショップ2020講演論文集(DIA2020), pp. 261-267, 沖縄, March 2020.(研究奨励賞 受賞) [PDF]
山下 淳, 日本機械学会ロボティクス・メカトロニクス部門 ベストプレゼンテーション表彰 受賞, 2005年6月10日. [賞状]
藤井 浩光(指導学生 博士2年), 精密工学会研究奨励賞 受賞, 2015年3月18日. [賞状]
Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Boosting-based Visualization of Concrete Defects for Hammering Inspection", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Best Paper 受賞, 2015年12月08日. [賞状]
藤井 浩光(指導学生 博士3年), 計測自動制御学会 SI部門 若手奨励賞 受賞, 2015年12月15日. [賞状]
藤井 浩光(指導学生 博士3年,申請時点), IEEE Robotics and Automation Society Japan Chapter Young Award 受賞, 2016年05月18日. [賞状]
藤井 浩光, 山下 淳, 淺間 一: "打音検査のための自動校正機能を備えた自動変状診断アルゴリズム", 日本機械学会賞(論文) 受賞, 2017年04月20日. [賞状] [副賞のメダル(表)] [副賞のメダル(裏)]
Louhi Kasahara Jun Younes(指導学生 博士2年), 2018年度精密工学会春季大会学術講演会 ベストプレゼンテーション賞 受賞, 2018年3月17日. [賞状]
Jun Younes Louhi Kasahara, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Complementarity of Sensors and Weak Supervision for Defect Detection in Concrete Structures", SII2020 Best Paper Award 受賞, 2020年01月14日. [賞状]
湊 真司(指導学生 修士2年), 動的画像処理実利用化ワークショップDIA2020 研究奨励賞 受賞, 2020年03月09日. [賞状]
 |
 |
 |
| 日本機械学会 ロボメカ部門 ベストプレゼンテーション |
精密工学会研究奨励賞 | ICAM2015 Best Paper |
 |
 |
 |
| 計測自動制御学会 SI部門 若手奨励賞 | IEEE RAS-JP Young Award | 日本機械学会賞(論文) |
 |
 |
 |
| 精密工学会春季大会学術講演会 ベストプレゼンテーション賞 |
SII2020 Best Paper Award | DIA2020研究奨励賞 |
|
 |
 |
 |
| 後田 啓太朗 Keitaro Ushiroda 東京大学 2019.4-2020.3学部 2020.4-2022.3修士 |
湊 真司 Shinji Minato 東京大学 2018.4-2020.3修士 |
ルイ笠原 純ユネス Jun Younès Louhi Kasahara 東京大学 2014.10-2015.9 交換留学生 2016.4-2016.9研究生 2016.9-2019.8博士 2019.8博士取得 2019.9-2020.9 特任研究員 2020.10- 特任助教 |
林 鐘勳 Jonghoon Im 東京大学 2013.4-2015.3修士 2015.4-2023.3博士 |
 |
 |
||
| 藤井 浩光 Hiromitsu Fujii 東京大学 2013.4-2016.3博士 2016.3博士取得 2016.4-2017.1特任助教 2017.2-2018.3特任講師 |
原 隆浩 Takahiro Hara 静岡大学 2002.4-2004.3修士 |
 |
 |
 |
 |
 |
| 水滴付き画像1 | 水滴付き画像2 | 水滴除去画像 |
蔵本 昌之, 山下 淳, 金子 透, 三浦 憲二郎: "画像中の視野妨害となる水滴の除去", 映像情報メディア学会誌, Vol. 56, No. 5, pp. 853-857, May 2002. [doi:10.3169/itej.56.853] [PDF]
山下 淳, 金子 透, 西村 正樹, 三浦 憲二郎: "カメラの方向変化を利用した悪天候時の視野明瞭化~首振りカメラを用いた画像中の視野妨害となる水滴の除去~", 映像情報メディア学会誌, Vol. 57, No. 10, pp. 1347-1353, October 2003. [doi:10.3169/itej.57.1347] [PDF]
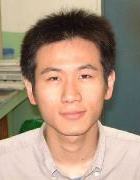
Atsushi Yamashita, Tomoaki Harada, Toru Kaneko and Kenjiro T. Miura: "Virtual Wiper -Removal of Adherent Noises from Images of Dynamic Scenes by Using a Pan-Tilt Camera-", Advanced Robotics, Vol. 19, No. 3, pp. 295-310, March 2005. [doi:10.1163/1568553053583643] [PDF] [bibtex]
Yuu Tanaka, Atsushi Yamashita, Toru Kaneko and Kenjiro T. Miura: "Removal of Adherent Waterdrops from Images Acquired with a Stereo Camera System", IEICE Transactions on Information and Systems, Vol. 89-D, No. 7, pp. 2021-2027, July 2006. [doi:10.1093/ietisy/e89-d.7.2021] [PDF]
山下 淳, 蔵本 昌之, 金子 透: "複数カメラを用いた画像中の視野妨害ノイズ除去", 電気学会論文誌C, Vol. 127, No. 4, pp. 480-488, April 2007. [doi:10.1541/ieejeiss.127.480] [PDF]
福地 功, 山下 淳, 金子 透, 三浦 憲二郎: "時空間画像処理による雨天時画像からの視野妨害ノイズ除去", 映像情報メディア学会誌, Vol. 62, No. 5, pp. 771-777, May 2008. [doi:10.3169/itej.62.771] [PDF]
Atsushi Yamashita, Masayuki Kuramoto and Toru Kaneko: "Removal of Adherent Noises in Images by Using Multiple Cameras", Electrical Engineering in Japan, Vol. 164, No. 3, pp. 50-59, August 2008. [doi:10.1002/eej.20697]
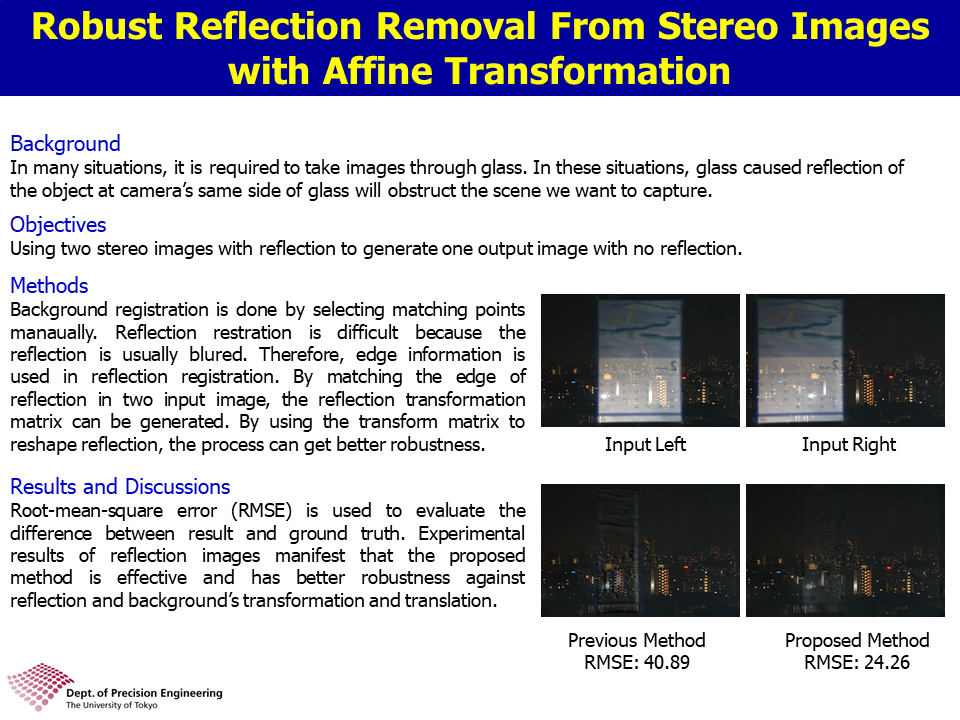
Jonghoon Im, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama: "Correction of Over and Under Exposure Images Using Multiple Lighting System", E-Journal of Advanced Maintenance, Vol. 7, No. 1, pp. 50-58, May 2015. [Link]
山下 淳, 日本ロボット学会 研究奨励賞 受賞, 2006年9月15日. [賞状] [副賞のメダル(表)] [副賞のメダル(表)]
福地 功(指導学生 修士1年), 動的画像処理実利用化ワークショップDIA2007 研究奨励賞次点, 2007年3月8日. [DIA2007HP]
福地 功(指導学生 修士2年), 映像情報メディア学会メディア工学研究委員会 学生研究発表会 優秀発表賞 受賞, 2008年2月16日. [賞状]
山下 淳, 第4回競基弘賞学術業績賞 受賞, 2009年1月15日. [賞状] [副賞のトロフィー] [新聞新聞での紹介記事] [Robot Watchでの紹介記事]
松井 彰良(指導学生 修士2年), 精密工学会画像応用技術専門委員会・映像情報メディア学会メディア工学研究会委員会 合同サマーセミナー2009 優秀発表賞 受賞, 2009年8月28日. [賞状]
松井 彰良, 山下 淳, 金子 透: 第15回ロボティクスシンポジア 最優秀論文賞 受賞, 2010年3月15日. [賞状]
松井 彰良(指導学生 2009年度修士修了), 計測自動制御学会 SI部門 若手奨励賞 受賞, 2010年12月24日. [賞状]
山下 淳, 日本機械学会ロボティクス・メカトロニクス部門 ROBOMEC表彰 受賞, 2011年5月27日. [賞状] [副賞のメダル]
 |
 |
 |
 |
| 日本ロボット学会 研究奨励賞 |
ITEメディア工学研究会 優秀発表賞 |
競基弘賞学術業績賞 | サマーセミナー2009 優秀発表賞 |
 |
 |
 |
| 第15回ロボティクスシンポジア 最優秀論文賞 |
計測自動制御学会 SI部門 若手奨励賞 |
ROBOMEC表彰 |
 |
| 船井情報科学振興財団 船井学術賞 |
 |
|
 |
 |
 |
| 蒋 雷 Lei Jiang 東京大学 2017.9-2019.9修士 2019.9-2020.3博士 |
林 鐘勳 Jonghoon Im 東京大学 2013.4-2015.3修士 2015.4-2023.3博士 |
鶴見 文哉 Fumiya Tsurumi 静岡大学 2010.4-2011.3学部 2011.4-2013.3修士 |
油井 広明 Hiroaki Yui 静岡大学 2010.4-2011.3学部 |
松井 彰良 Akiyoshi Matsui 静岡大学 2008.4-2010.3修士 |
 |
 |
 |
 |
|
| 福地 功 Isao Fukuchi 静岡大学 2005.4-2006.3学部 2006.4-2008.3修士 |
原田 知明 Tomoaki Harada 静岡大学 2003.4-2004.3学部 2004.4-2006.3修士 |
田中 友 Yu Tanaka 静岡大学 2002.4-2003.3学部 2003.4-2005.3修士 2005.4-2007.3博士 |
蔵本 昌之 Masayuki Kuramoto 静岡大学 2000.4-2001.3学部 2001.4-2003.3修士 |
 |
 |
| 従来手法 |
 |
| 提案手法 |
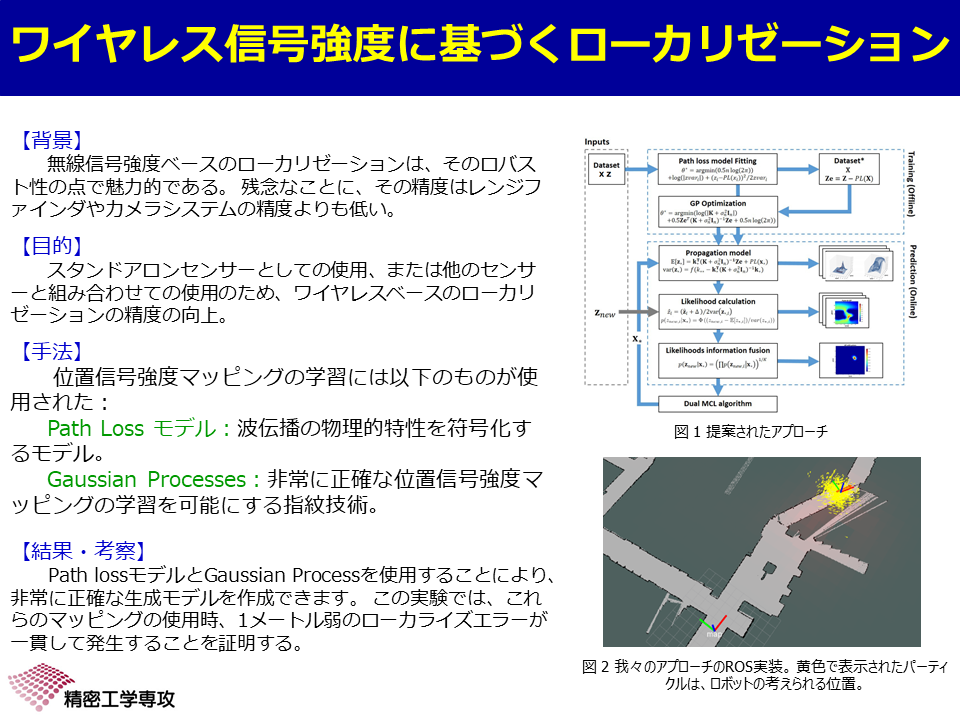
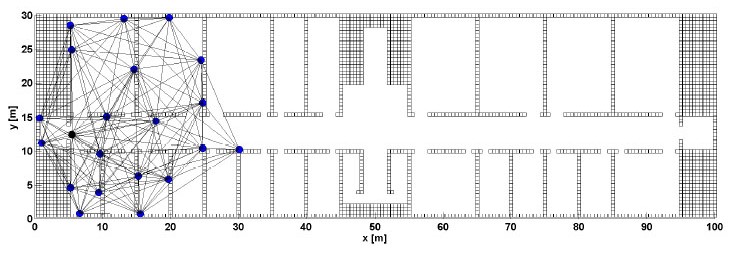
Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Precise and Accurate Wireless Signal Strength Mappings Using Gaussian Processes and Path Loss Models", Robotics and Autonomous Systems, Vol. 103, pp. 134-150, May 2018. [doi:10.1016/j.robot.2018.02.011]
Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Data Information Fusion from Multiple Access Points for WiFi-based Self-localization", IEEE Robotics and Automation Letters, Vol. 4, No. 2, pp. 269-276, April 2019. [doi:10.1109/LRA.2018.2885583]
Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Distributed Algorithm for Robotic Network Self-deployment in Indoor Environments Using Wireless Signal Strength", Proceedings of the 13th International Conference on Autonomous Intelligent Systems (IAS-13), Padova (Italy), July 2014. [PDF]
Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Gaussian Processes with Input-dependent Noise Variance for Wireless Signal Strength-based Localization", Proceedings of the 13th IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2015), West Lafayette (USA), October 2015. [PDF]
Renato Miyagusuku, Atsushi Yamashita and Hajime Asama: "Gaussian Processes Mappings Improvements Using Path Loss Models for Wireless Signals-based Localization", Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2016), pp. 4610-4615, Daejeon (Korea), October 2016. [PDF] [Video]
Renato Miyagusuku, Yiploon Seow, Atsushi Yamashita and Hajime Asama: "Fast and Robust Localization using Laser Rangefinder and WiFi Data", Proceedings of 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI2017), pp. 111-117, Daegu (Korea), November 2017. [PDF]
Renato Miyagusuku(指導学生 博士3年,申請時点), IEEE Robotics and Automation Society Japan Joint Chapter Young Award 受賞, 2019年05月20日. [賞状]
 |
| IEEE RAS-JP Young Award |
 |
 |
| Yip Loon Seow 東京大学 2016.4-2017.3研究生 |
Renato Miyagusuku 東京大学 2013.4-2013.9研究生 2013.10-2015.9修士 2015.10-2018.9博士 2018.9博士取得 2018.10-2019.3 特任研究員 |
 |
 |
 |
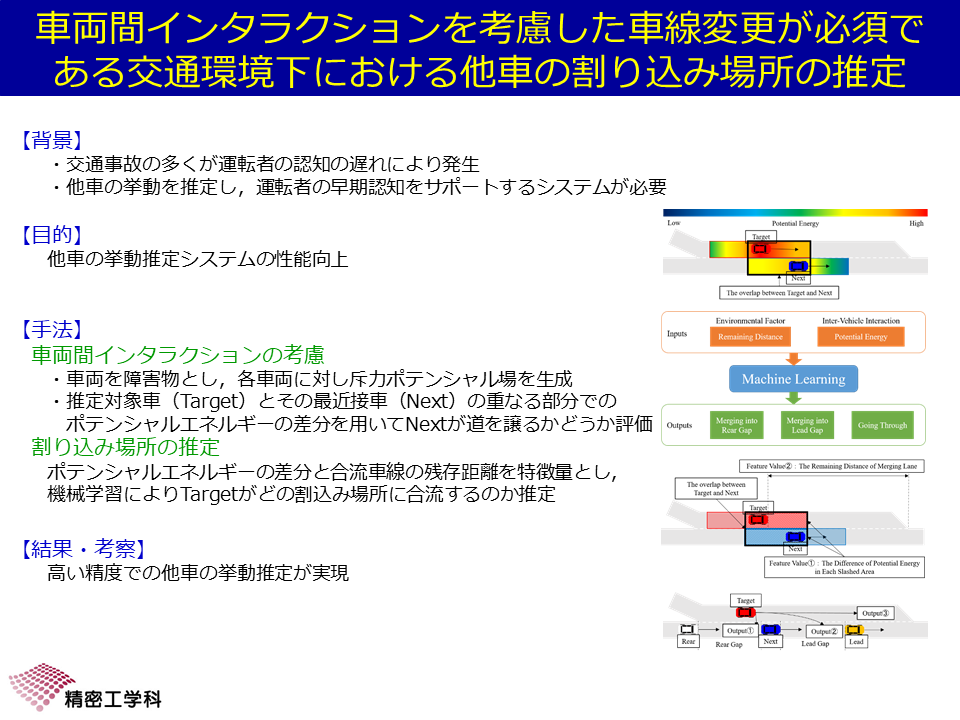
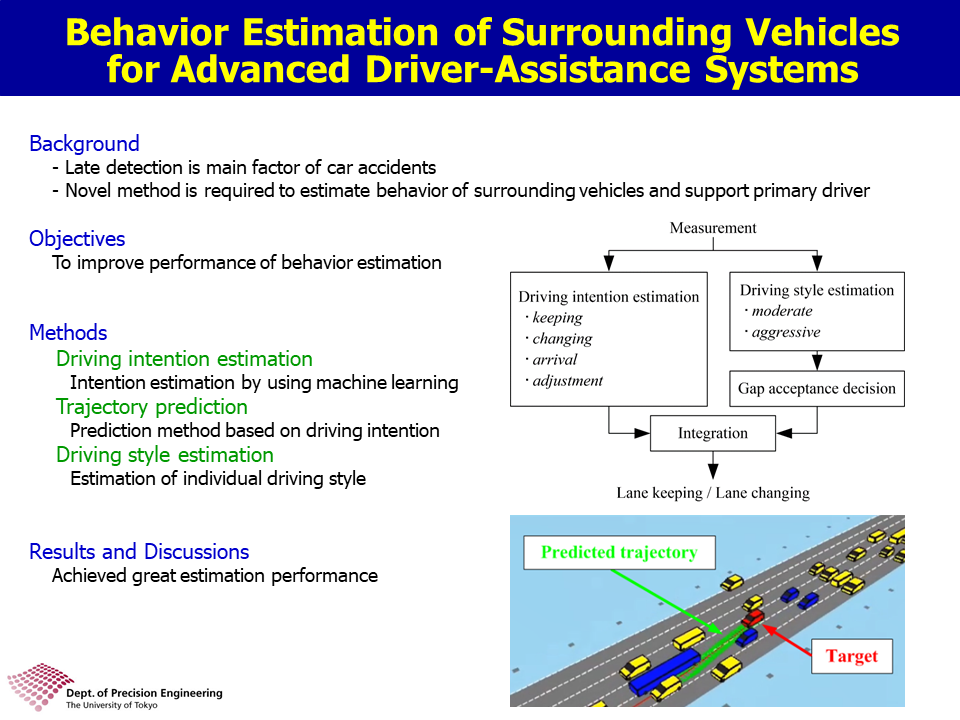
| 他車の車線変更の推定 |
Hanwool Woo, Yonghoon Ji, Hitoshi Kono, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Automatic Detection Method of Lane-Changing Intentions Based on Relationship with Adjacent Vehicles Using Artificial Potential Fields", International Journal of Automotive Engineering, Vol. 7, No. 4, pp. 127-134, November 2016. [doi:10.20485/jsaeijae.7.4_127]
Hanwool Woo, Yonghoon Ji, Hitoshi Kono, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Lane-Change Detection Based on Vehicle-Trajectory Prediction", IEEE Robotics and Automation Letters, Vol. 2, No. 2, pp. 1109-1116, April 2017. [doi:10.1109/LRA.2017.2660543]
Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Dynamic State Estimation of Driving Style Based on Driving Risk Feature", International Journal of Automotive Engineering, Vol. 9, No. 1, pp. 31-38, March 2018. [doi:10.20485/jsaeijae.9.1_31]
Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Trajectory Prediction of Surrounding Vehicles Considering Individual Driving Characteristics", International Journal of Automotive Engineering, Vol. 9, No. 4, pp. 282-288, December 2018. [doi:10.20485/jsaeijae.9.4_282]
Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Lane-Change Detection Based on Individual Driving Style", Advanced Robotics, Vol. 33, No. 20, pp. 1087-1098, October 2019. [doi:10.1080/01691864.2019.1659179]
Hanwool Woo, Hirokazu Madokoro, Kazuhito Sato, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Advanced Adaptive Cruise Control Based on Operation Characteristic Estimation and Trajectory Prediction", Applied Sciences, Vol. 9, No. 22, 4875, pp. 1-18, November 2019. [doi:10.3390/app9224875]
禹 ハンウル, 間所 洋和, 佐藤 和人, 田村 雄介, 山下 淳, 淺間 一: "先行車追従モデルに基づいた追従運転者の操作特性の推定", 自動車技術会論文集, Vol. 51, No. 2, pp. 304-309, March 2020. [doi:10.11351/jsaeronbun.51.304]
Hanwool Woo, Mizuki Sugimoto, Hirokazu Madokoro, Kazuhito Sato, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Goal Estimation of Mandatory Lane Changes Based on Interaction Between Drivers", Applied Sciences, Vol. 10, No. 9, 3289, pp. 1-12, May 2020. [doi:10.3390/app10093289]
Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Driver Classification in Vehicle-Following Behavior by Using Dynamic Potential Field Method", Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC2017), pp. 1101-1106, Yokohama (Japan), October 2017. [doi:10.1109/ITSC.2017.8317774] [PDF]
Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Yasuhide Kuroda, Takashi Sugano, Yasunori Yamamoto, Atsushi Yamashita and Hajime Asama: "Advanced Adaptive Cruise Control Based on Collision Risk Assessment", Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems (ITSC2018), pp. 939-944, Maui (USA), November 2018. [doi:10.1109/ITSC.2018.8569759] [PDF]
禹 ハンウル, 池 勇勳, 河野 仁, 田村 雄介, 黒田 康秀, 菅野 崇, 山本 康典, 山下 淳, 淺間 一: "車線変更推定法および人工ポテンシャル法を用いた他車の走行軌道予測", 第17回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2016), SI2016優秀講演賞 受賞, 2016年12月18日. [賞状]
禹 ハンウル(指導学生 博士3年), 自動車技術会大学院研究奨励賞 受賞, 2018年03月05日. [賞状]
 |
 |
| SI2016優秀講演賞 | 自動車技術会大学院研究奨励賞 |
 |
 |
| 杉本 瑞生 Mizuki Sugimoto 東京大学 2018.4-2019.3学部 2019.4-2021.3修士 |
禹 ハンウル Hanwool Woo 東京大学 2015.4-2018.3博士 2018.3博士取得 2018.4-2019.3 学振特別研究員 2020.4-特任講師 |
 |
 |
 |
 |
 |
| 人間動作の計測 | 人間動作の計測装置 | 人間動作の解析シミュレーション |
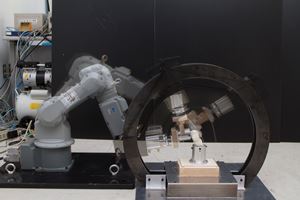 |
| ロボット技術を用いた膝関節模型による膝負荷計測 |
Qi An, Yuki Ishikawa, Junki Nakagawa, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Measurement of Just Noticeable Difference of Hip Joint for Implementation of Self-efficacy: In Active and Passive Sensation and in Different Speed", Advanced Robotics, Vol. 28, No. 7, pp. 505-511, January 2014. [doi:10.1080/01691864.2013.876938]
安 琪, 石川 雄己, 舩戸 徹郎, 青井 伸也, 岡 敬之, 山川 博司, 山下 淳, 淺間 一: "座面高と速度の異なるヒト起立動作における筋シナジー解析", 計測自動制御学会論文集, Vol. 50, No. 8, pp. 560-568, August 2014.(2015年度計測自動制御学会論文賞 受賞) [doi:10.9746/sicetr.50.560] [PDF]
花谷 耕平, 山川 博司, 石川 雄己, Qi An, 山下 淳, 淺間 一: "膝関節実形状模型を用いたヒトの起立動作時の負荷計測システムの開発", 精密工学会誌, Vol. 81, No. 1, pp. 99-104, January 2015. [doi:10.2493/jjspe.81.99] [PDF]
Junki Nakagawa, Qi An, Yuki Ishikawa, Hiroyuki Oka, Kaoru Takakusaki, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Human Motor Skill in Dart Throwing Motion at Different Distance", SICE Journal of Control, Measurement, and System Integration, Vol. 8, No. 1, pp. 79-85, January 2015. [doi:10.9746/jcmsi.8.79] [PDF]
Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Muscle Synergy Structure using Different Strategies in Human Standing-up Motion", Advanced Robotics, Vol. 31, No. 1-2, pp. 40-54, January 2017. [doi:10.3389/10.1080/01691864.2016.1238781]
Yuki Ishikawa, Qi An, Junki Nakagawa, Hiroyuki Oka, Tetsuro Yasui, Michio Tojima, Haruhi Inokuchi, Nobuhiko Haga, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Gait Analysis of Patients with Knee Osteoarthritis by Using Elevation Angle: Confirmation of the Planar Law and Analysis of Angular Difference in the Approximate Plane", Advanced Robotics, Vol. 31, No. 1-2, pp. 68-79, January 2017. [doi:10.3389/10.1080/01691864.2016.1229217]
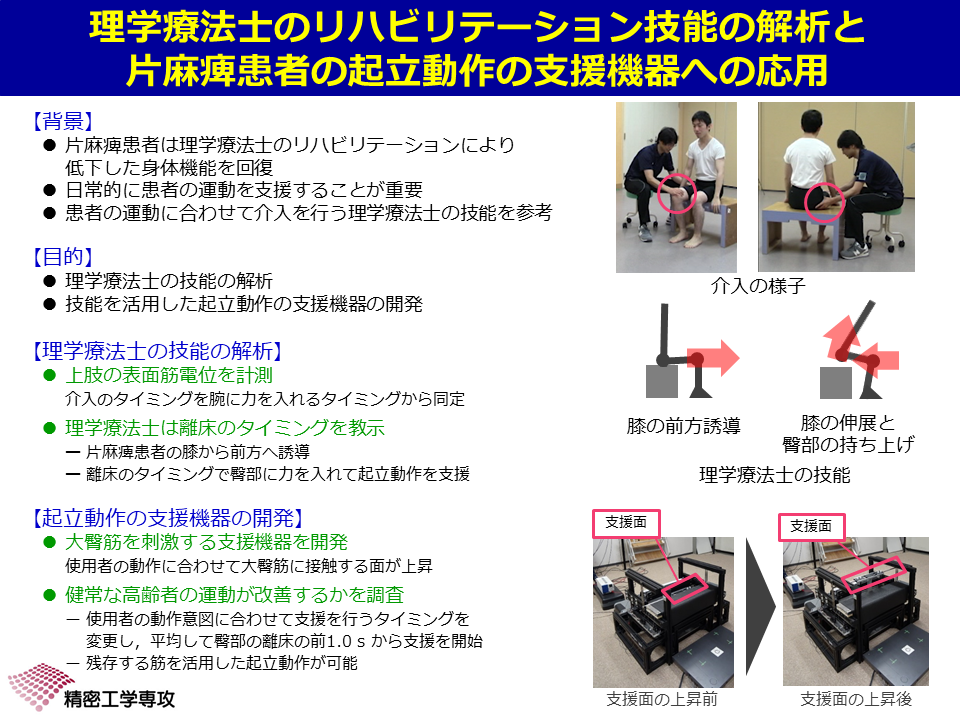
Hiroki Kogami, Qi An, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Hajime Asama, Shingo Shimoda, Hiroshi Yamasaki, Matti Itkonen, Fady Alnajjar, Noriaki Hattori, Makoto Kinomoto, Kouji Takahashi, Takanori Fujii, Hironori Otomune and Ichiro Miyai: "Effect of Physical Therapy on Muscle Synergy Structure during Standing-up Motion of Hemiplegic Patients", IEEE Robotics and Automation Letters, Vol. 3, No. 3, pp. 2229-2236, July 2018. [doi:10.1109/LRA.2018.2811050]
Kazunori Yoshida, Qi An, Arito Yozu, Ryosuke Chiba, Kaoru Takakusaki, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Visual and Vestibular Inputs Affect Muscle Synergies Responsible for Body Extension and Stabilization in Sit-to-Stand Motion", Frontiers in Neuroscience, Article 1042, pp. 1-12, January 2019. [doi:10.3389/fnins.2018.01042]
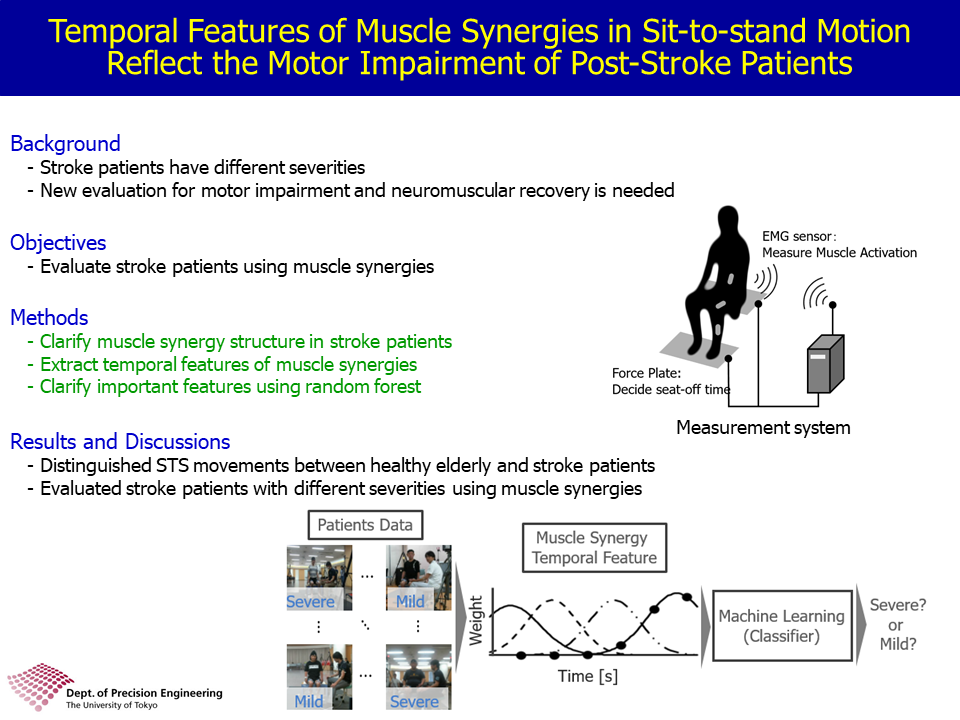
Ningjia Yang, Qi An, Hiroki Kogami, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady Sshibata-Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama: "Temporal Features of Muscle Synergies in Sit-to-stand Motion Reflect the Motor Impairment of Post-Stroke Patients", IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 27, No. 10, pp. 2118-2127, October 2019. [doi:10.1109/TNSRE.2019.2939193]
Ningjia Yang, Qi An, Hiroki Kogami, Kazunori Yoshida, Hiroshi Yamakawa, Yusuke Tamura, Shingo Shimoda, Hiroshi Yamasaki, Moeka Sonoo, Matti Itkonen, Fady Alnajjar, Noriaki Hattori, Makoto Kinomoto, Kouji Takahashi, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama: "Temporal Muscle Synergy Features Estimate Effects of Short-term Rehabilitation in Sit-to-stand of Post-stroke Patients", IEEE Robotics and Automation Letters, Vol. 5, No. 2, pp. 1796-1802, April 2020. [doi:10.1109/LRA.2020.2969942]
Kazunori Yoshida, Qi An, Hiroyuki Hamada, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Artificial Neural Network that Modifies Muscle Activity in Sit-to-Stand Motion Using Sensory Input", Advanced Robotics, Vol. 35, No. 13-14, pp. 858-866, July 2021. [doi:10.1080/01691864.2021.1917452]
Hiroki Kogami, Qi An, Ningjia Yang, Ruoxi Wang, Kazunori Yoshida, Hiroyuki Hamada, Hiroshi Yamakawa, Yusuke Tamura, Shingo Shimoda, Hiroshi Yamasaki, Moeka Sonoo, Fady Alnajjar, Noriaki Hattori, Koji Takahashi, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama: "Analysis of Muscle Synergy and Kinematics in Sit-to-stand Motion of Hemiplegic Patients in Subacute Period", Advanced Robotics, Vol. 35, No. 13-14, pp. 867-877, July 2021. [doi:10.1080/01691864.2021.1928547]
Qi An, Ningjia Yang, Hiroshi Yamakawa, Hiroki Kogami, Kazunori Yoshida, Ruoxi Wang, Atsushi Yamashita, Hajime Asama, Shu Ishiguro, Shingo Shimoda, Hiroshi Yamasaki, Moeka Yokoyama, Fady Alnajjar, Noriaki Hattori, Kouji Takahashi, Takanori Fujii, Hironori Otomune, Ichiro Miyai and Ryo Kurazume: "Classification of Motor Impairments of Post-stroke Patients based on Force Applied to a Handrail", IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022. [doi:10.1109/TNSRE.2021.3127504]
Junki Nakagawa, Qi An, Yuki Ishikawa, Hiroyuki Oka, Kaoru Takakusaki, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Joint Correlation between Arm and Lower Body in Dart Throwing Motion", Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC2013), pp. 1223-1228, Manchester (UK), October 2013. [doi:10.1109/SMC.2013.212] [PDF]
Qi An, Yuki Ishikawa, Junki Nakagawa, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Muscle Synergy Analysis of Human Standing-up Motion with Different Chair Heights and Different Motion Speeds", Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC2013), pp. 3579-3584, Manchester (UK), October 2013. [doi:10.1109/SMC.2013.610] [PDF]
Qi An, Yuki Ishikawa, Tetsuro Funato, Shinya Aoi, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Generation of Human Standing-up Motion with Muscle Synergies Using Forward Dynamic Simulation", Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA2014), pp. 730-735, Hong Kong (China), June 2014. [doi:10.1109/ICRA.2014.6906935] [PDF] [Video] [bibtex]
Qi An, Yuki Ishikawa, Shinya Aoi, Tetsuro Funato, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Analysis of Muscle Synergy Contribution on Human Standing-up Motion Using Human Neuro-Musculoskeletal Model", Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp. 5885-5890, Seattle (USA), May 2015. [doi:10.1109/ICRA.2015.7140023] [PDF] [Video] [bibtex]
Ruoxi Wang, Qi An, Ningjia Yang, Hiroki Kogami, Kazunori Yoshida, Hiroyuki Hamada, Shingo Shimoda, Hiroshi Yamasaki, Moeka Sonoo, Fady Alnajjar, Noriaki Hattori, Kouji Takahashi, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama: "Muscle Tension Analysis in Stroke Patient Sit-to-Stand Motion by Joint Torque-Based Normalization", Proceedings of the 5th International Conference on NeuroRehabilitation (ICNR2020), October 2020. (Best Paper Award) [PDF]
安 琪, 石川 雄己, 舩戸 徹郎, 青井 伸也, 岡 敬之, 山川 博司, 山下 淳, 淺間 一: "座面高と速度の異なるヒト起立動作における筋シナジー解析", 2015年度計測自動制御学会論文賞 受賞, 2015年10月27日. [賞状] [副賞の楯]
Qi An, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Muscle Synergies of Sit-to-Stand and Walking Account for Sit-to-Walk Motion", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
Qi An, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Temporal Structure of Muscle Synergy of Human Stepping Leg During Sit-to-Walk Motion", 14th International Confenrece on Intelligent Autonomous Systems (IAS-14), Best Conference Paper Award Finalist 受賞, 2016年07月05日. [賞状]
Ruoxi Wang, Qi An, Ningjia Yang, Hiroki Kogami, Kazunori Yoshida, Hiroyuki Hamada, Shingo Shimoda, Hiroshi Yamasaki, Moeka Sonoo, Fady Alnajjar, Noriaki Hattori, Kouji Takahashi, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita and Hajime Asama: "Muscle Tension Analysis in Stroke Patient Sit-to-Stand Motion by Joint Torque-Based Normalization", ICNR2020 Best Paper Award 受賞, 2020年10月30日. [賞状]
 |
 |
 |
| 計測自動制御学会論文賞 | ICAM2015 Honorable Mention | IAS-14 Best Conference Paper Award Finalist |
 |
||
| ICNR2020 Best Paper Award |
 |
 |
 |
 |
 |
| 王 若曦 Ruoxi Wang 東京大学 2019.9-2021.9修士 2021.10-研究生 |
湖上 碩樹 Hiroki Kogami 東京大学 2017.4-2019.3修士 2019.4-2022.3博士 |
吉田 和憲 Kazunori Yoshida 東京大学 2016.4-2017.3学部 2019.4-2022.3博士 |
楊 濘嘉 Ningjia Yang 東京大学 2014.10-2015.3研究生 2015.4-2017.3修士 2017.4-2020.3博士 2020.3博士取得 2020.4-2020.6 特任研究員 |
石川 雄己 Yuki Ishikawa 東京大学 2011.4-2013.3修士 2013.4-2017.3博士 2017.3博士取得 |
 |
 |
 |
 |
|
| 中野 信泰 Nobuyasu Nakano 東京大学 2014.4-2015.3学部 |
安 琪 Qi An 東京大学 2011.10-2014.9博士 2014.9博士取得 2014.10-2015.3 学振特別研究員 2015.4-2017.3特任助教 2017.4-2020.3助教 |
花谷 耕平 Kohei Hanatani 東京大学 2013.4-2014.3学部 |
中川 純希 Junki Nakagawa 東京大学 2012.4-2013.3学部 2013.4-2015.3修士 |
 |
 |
 |
|
| ラバーハンド錯覚 |
Wen Wen, Atsushi Yamashita and Hajime Asama: "The Sense of Agency during Continuous Action: Performance is More Important than Action-Feedback Association", PLOS ONE, Vol. 10, No. 4, e0125226, pp. 1-16, April 2015. [doi:10.1371/journal.pone.0125226]
辻 琢真, 濱崎 峻資, 前田 貴記, 加藤 元一郎, 岡 敬之, 山川 博司, 高草木 薫, 山下 淳, 淺間 一: "ラバーハンド錯覚における筋電位及び皮膚電位反応の解析", 計測自動制御学会論文集, Vol. 51, No. 6, pp. 440-447, June 2015. [doi:10.9746/sicetr.51.440] [PDF]
Wen Wen, Atsushi Yamashita and Hajime Asama: "The Influence of Action-Outcome Delay and Arousal on Sense of Agency and the Intentional Binding Effect", Consciousness and Cognition, Vol. 36, pp. 87-95, November 2015. [doi:10.1016/j.concog.2015.06.004]
Wen Wen, Atsushi Yamashita and Hajime Asama: "The Influence of Goals on Sense Control", Consciousness and Cognition, Vol. 37, pp. 83-90, December 2015. [doi:10.1016/j.concog.2015.08.012]
Wen Wen, Atsushi Yamashita and Hajime: "Divided Attention and Processes Underlying Sense of Agency", Frontiers in Psychology, Vol. 7, No. 35, pp. 1-8, January 2016. [doi:10.3389/fpsyg.2016.00035]
Wen Wen, Katsutoshi Muramatsu, Shunsuke Hamasaki, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Goal-directed Movement Enhances Body Representation Updating", Frontiers in Human Neuroscience, Vol. 10, Article 329, pp. 1-10, June 2016. [doi:10.3389/fnhum.2016.00329]
Rin Minohara, Wen Wen, Shunsuke Hamasaki, Takaki Maeda, Motoichiro Kato, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Strength of Intentional Effort Enhances the Sense of Agency", Frontiers in Psychology, Vol. 7, No. 1165, pp. 1-5, July 2016. [doi:10.3389/fpsyg.2016.01165]
Wen Wen, Atsushi Yamashita and Hajime Asama: "Measurement of the Perception of Control during Continuous Movement Using Electroencephalography", Frontiers in Human Neuroscience, Vol. 11, Article 392, pp. 1-7, July 2017. [doi:10.3389/fnhum.2017.00392]
Wen Wen, Atsushi Yamashita and Hajime Asama: "The Influence of Performance on Action-Effect Integration in Sense of Agency", Consciousness and Cognition, Vol. 53, pp. 89-98, August 2017. [doi:10.1016/j.concog.2017.06.008]
Shunsuke Hamasaki, Qi An, Masataka Murabayashi, Yusuke Tamura, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Evaluation of the Effect of Prime Stimulus on Sense of Agency in Stop Operation of the Object in Circular Motion", Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol. 21, No. 7, pp. 1161-1171, November 2017. [doi:10.20965/jaciii.2017.p1161]
Shunsuke Hamasaki, Qi An, Wen Wen, Yusuke Tamura, Hiroshi Yamakawa, Satoshi Unenaka, Satoshi Shibuya, Yukari Ohki, Atsushi Yamashita and Hajime Asama: "Changes in Body Representation of the Human Upper Limb as a Function of Movement and Visual Hand Position", Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol. 23, No. 2, pp. 196-208, March 2019. [doi:10.20965/jaciii.2019.p0196]
Wen Wen, Hiroshi Shibata, Ryu Ohata, Atsushi Yamashita, Hajime Asama and Hiroshi Imamizu: "The Active Sensing of Control Difference", iScience, Vol. 23, No. 5, 101112, pp. 1-11, May 2020. [doi:10.1016/j.isci.2020.101112]
Wen Wen, Naoto Shimazaki, Ryu Ohata, Atsushi Yamashita, Hajime Asama and Hiroshi Imamizu: "Categorical Perception of Control", eNeuro, Vol. 7, No. 5, pp. 1-11, September/October 2020. [doi:10.1523/ENEURO.0258-20.2020]
Kei Aoyagi, Wen Wen, Qi An, Shunsuke Hamasaki, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Modified Sensory Feedback Enhances the Sense of Agency during Continuous Body Movements in Virtual Reality", Scientific Reports, Vol. 11, Article 2553, January 2021. [doi:10.1038/s41598-021-82154-y]
Wen Wen, Sonmin Yun, Atsushi Yamashita, Brandon D. Northcutt and Hajime Asama: "Deceleration Assistance Mitigated the Trade-off between Sense of Agency and Driving Performance", Frontiers in Psychology, Vol. 12, Article 643516, pp. 1-9, June 2021. [doi:10.3389/fpsyg.2021.643516]
松本 倫実, 濱崎 峻資, 前田 貴記, 加藤 元一郎, 山川 博司, 高草木 薫, 山下 淳, 淺間 一: "聴覚刺激及びリズムの周期性が運動主体感に与える影響の評価", 第23回ライフサポート学会フロンティア講演会予稿集, p. 59, February 2014.(ライフサポート学会奨励賞 受賞) [PDF]
村松 克俊, 温 文, 濱崎 峻資, 山川 博司, 安 琪, 田村 雄介, 山下 淳, 淺間 一: "行動目標がラバーハンド錯覚に与える影響", 第25回ライフサポート学会フロンティア講演会予稿集, p. 136, 東京, March 2016.(ライフサポート学会奨励賞 受賞) [PDF]
Shunsuke Hamasaki, Qi An, Wen Wen, Yusuke Tamura, Hiroshi Yamakawa, Atsushi Yamashita, Hajime Asama, Satoshi Shibuya and Yukari Ohki: "Evaluating Effect of Sense of Ownership and Sense of Agency on Body Representation Change of Human Upper Limb", 2015 International Symposium on Micro-Nano Mechatronics and Human Science (MHS2015), Best Poster Award 受賞, 2015年11月25日. [賞状]
Rin Minohara, Wen Wen, Shunsuke Hamasaki, Takaki Maeda, Qi An, Yusuke Tamura, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "How Anticipation for the Sense of Agency Affects Readiness Potential", 2016 International Symposium on Micro-Nano Mechatronics and Human Science (MHS2016), Best Poster Award 受賞, 2016年11月30日. [賞状]
尹 ソンミン(指導学生 修士2年), 自動車技術会大学院研究奨励賞 受賞, 2020年03月05日. [賞状]
 |
 |
 |
| MHS2015 Best Poster Award | MHS2016 Best Poster Award | 自動車技術会大学院研究奨励賞 |
 |
 |
 |
 |
 |
| 興津 亨祐 Kyosuke Okitsu 東京大学 2021.4-2022.3学部 |
本間 拓真 Takuma Homma 東京大学 2020.4-2022.3修士 |
尾近 祐太 Yuta Okon 東京大学 2020.4-2021.3学部 |
釜木 優人 Yuto Kamaki 東京大学 2019.4-2020.3学部 |
青柳 恵 Kei Aoyagi 東京大学 2019.4-2021.5博士 |
 |
 |
|
 |
 |
| 尹 碩珉 Seokmin Yun 東京大学 2017.4-2018.3学部 2018.4-2020.3修士 |
村松 克俊 Katsutoshi Muramatsu 東京大学 2015.4-2016.3学部 |
濱崎 峻資 Shunsuke Hamasaki 東京大学 2010.4-2013.3修士 2013.10-2018.3博士 2018.3博士取得 2018.4-2019.3 特任研究員 2019.4-特任助教 |
簑原 凜 Rin Minohara 東京大学 2014.4-2015.3学部 2015.4-2017.3修士 |
辻 琢真 Takuma Tsuji 東京大学 2012.4-2014.3修士 |
 |
||||
| 松本 倫実 Satomi Matsumoto 東京大学 2013.4-2014.3学部 |
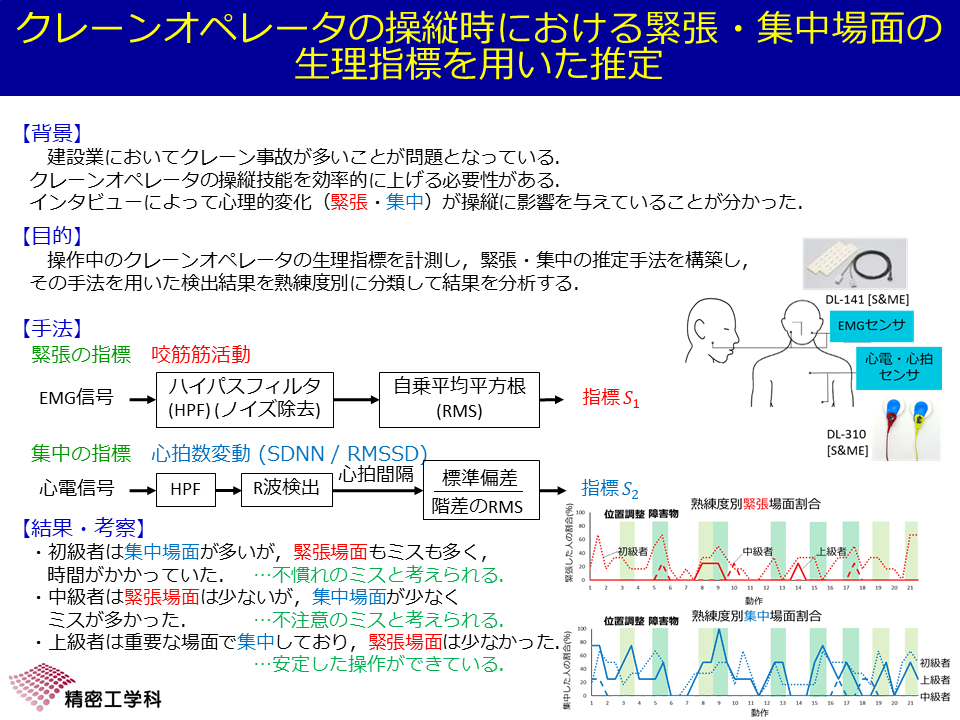 |
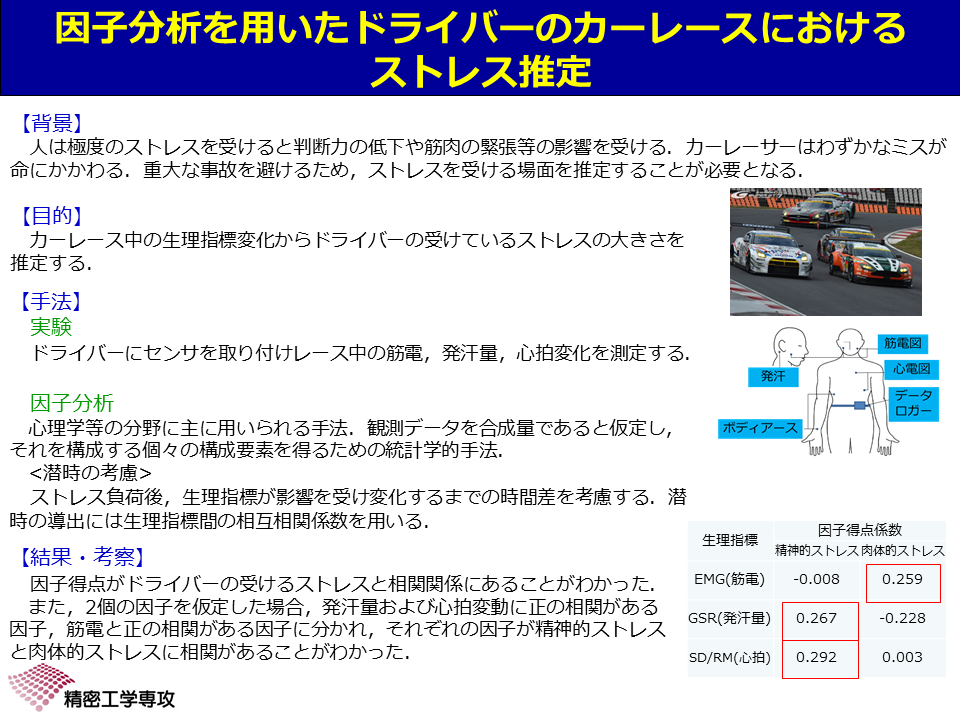 |
 |
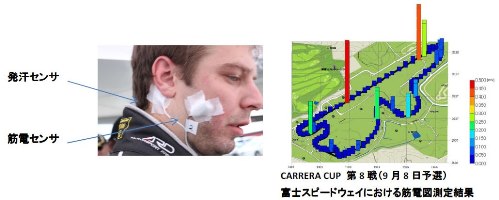 |
|
| カーレーサーの計測 | レース場での計測結果 (http://www.gsport.co.jp/img/pdf/press_releases20121120.pdfより抜粋) |
Wen Wen, Daisuke Tomoi, Hiroshi Yamakawa, Shunsuke Hamasaki, Kaoru Takakusaki, Qi An, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Continuous Estimation of Stress Using Physiological Signals during a Car Race", Psychology, Vol. 8, pp. 978-986, May 2017. [doi:10.4236/psych.2017.87064]
Takao Sugimoto, Hiroshi Yamakawa, Qi An, Wen Wen, Yusuke Tamura, Koichi Ohtomi, Takayuki Kosaka, Hiromasa Suzuki, Atsushi Yamashita and Hajime Asama: "Estimation of Tension and Concentration Scenes during Crane Operation Using Physiological Indices for Skill Improvement Support", Proceedings of the 5th International Conference on Serviceology (ICServ2017), pp. 153-160, Vienna (Austria), July 2017. [PDF]
山川 博司, Le Quoc Dung, 山下 淳, 淺間 一: "生理計測に基づくカーレーサーのストレス推定", 計測自動制御学会システム・情報部門学術講演会2014講演論文集(SSI2014), pp. 853-858, 岡山, November 2014. [PDF]
 |
 |
|
 |
| 成川 文堂 Ayato Narikawa 東京大学 2021.4-2022.3学部 2022.4-2024.3修士 |
片山 諒 Ryo Katayama 東京大学 2020.4-2021.3学部 |
杉本 瑞生 Mizuki Sugimoto 東京大学 2018.4-2019.3学部 2019.4-2021.3修士 | 杉本 賢勇 Takao Sugimoto 東京大学 2016.4-2017.3学部 2017.4-2019.3修士 |
 |
 |
||
| 友井 大将 Daisuke Tomoi 東京大学 2014.4-2016.3修士 |
レ クオク ズン Quoc Dung Le 東京大学 2012.4-2014.3修士 |
 |
 |
| 全方位カメラ | 全方位画像 |
 |
 |
 |
| 単眼初号機ロボット | 単眼2号機ロボット | ステレオ初号機ロボット |
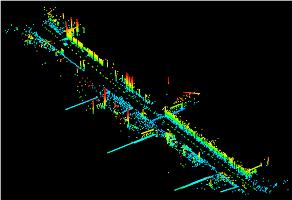 |
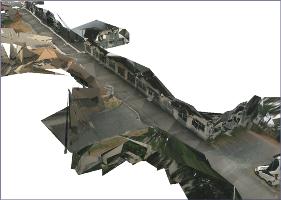 |
| 屋外環境計測結果 | テクスチャマッピング結果 |
山下 淳, 原田 知明, 金子 透: "全方位カメラ搭載移動ロボットによるStructure from Motionを用いた3次元環境モデリング", 日本機械学会論文集(C編), Vol. 73, No. 726, pp. 512-519, February 2007. [doi:10.1299/kikaic.73.512] [PDF]
Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko: "Three-Dimensional Environment Model Construction from an Omnidirectional Image Sequence", Journal of Robotics and Mechatronics, Vol. 21, No. 5, pp. 574-582, October 2009. [doi:10.20965/jrm.2009.p0574] [PDF]
川西 亮輔, 山下 淳, 金子 透: "全方位画像列からの特徴点および直線エッジ情報を併用したStructure from Motionによる3次元環境モデル生成", 電気学会論文誌C, Vol. 130, No. 9, pp. 1494-1503, September 2010. [doi:10.1541/ieejeiss.130.1494] [PDF]
川西 亮輔, 山下 淳, 金子 透: "全方位画像中の特徴点と直線エッジの同時拘束と基線長の自動決定に基づくStructure from Motionによる三次元環境モデル生成", 日本ロボット学会誌, Vol. 30, No. 4, pp. 399-410, May 2012. [doi:10.7210/jrsj.30.399] [PDF]
Ryosuke Kawanishi, Atsushi Yamashita, Toru Kaneko and Hajime Asama: "Parallel Line-based Structure from Motion by Using Omnidirectional Camera in Textureless Scene", Advanced Robotics, Vol. 27, No. 1, pp. 19-32, January 2013.(FA財団論文賞受賞) [doi:10.1080/01691864.2013.751160] [PDF] [bibtex]
Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko: "Construction of 3D Environment Model from an Omni-Directional Image Sequence", Proceedings of the 3rd Asia International Symposium on Mechatronics (AISM2008), TP1-3(2), pp. 1-6, Sapporo (Japan), August 2008. (AISM2008 Best Student Paper Award) [PDF]
Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko: "Estimation of Camera Motion with Feature Flow Model for 3D Environment Modeling by Using Omni-Directional Camera", Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2009), pp. 3089-3094, St. Louis (USA), October 2009. (IEEE Robotics and Automation Society Japan Chapter Young Award) [doi:10.1109/IROS.2009.5354671] [PDF] [Video]
Ryosuke Kawanishi, Atsushi Yamashita, Toru Kaneko and Hajime Asama: "Line-based Camera Movement Estimation by Using Parallel Lines in Omnidirectional Video", Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA2012), pp. 3573-3579, Saint Paul (USA), May 2012. [doi:10.1109/ICRA.2012.6224816] [PDF] [Video] [bibtex]
川西 亮輔(指導学生 修士2年), Asia International Symposium on Mechatronics 2008, AISM2008 Best Student Paper Award 受賞, 2008年8月29日. [賞状]
川西 亮輔(指導学生 博士1年), IEEE Robotics and Automation Society Japan Chapter Young Award 受賞, 2009年10月12日. [賞状]
川西 亮輔(指導学生 博士2年), 2010年度精密工学会秋季大会 ベストポスタープレゼンテーション賞 受賞, 2010年9月29日. [賞状]
川西 亮輔, 山下 淳, 金子 透, 淺間 一: "Parallel Line-based Structure from Motion by Using Omnidirectional Camera in Textureless Scene", FA財団論文賞 受賞, 2014年12月12日. [賞状]
 |
 |
 |
 |
| AISM2008 Best Student Paper Award | IEEE RAS-JP Young Award |
精密工学会秋季大会 ベストポスター プレゼンテーション賞 |
FA財団論文賞 |
 |
 |
 |
|
| 渡辺 和史 Kazushi Watanabe 静岡大学 2010.4-2011.3学部 2011.4-2013.3修士 |
石塚 大輔 Daisuke Ishizuka 静岡大学 2009.4-2010.3学部 2010.4-2012.3修士 |
後藤 真一 Shinichi Goto 静岡大学 2009.4-2010.3学部 2010.4-2012.3修士 |
纐纈 理志 Tadashi Koketsu 静岡大学 2008.4-2009.3学部 2009.4-2011.3修士 |
 |
 |
|
|
| 井上 渉 Wataru Inoue 静岡大学 2008.4-2009.3学部 |
川西 亮輔 Ryosuke Kawanishi 静岡大学 2006.4-2007.3学部 2007.4-2009.3修士 2009.4-2012.3博士 2012.3博士取得 |
原田 知明 Tomoaki Harada 静岡大学 2003.4-2004.3学部 2004.4-2006.3修士 |
 |
 |
| レーザ搭載移動ロボット(初号機) | レーザ搭載移動ロボット(2号機) |
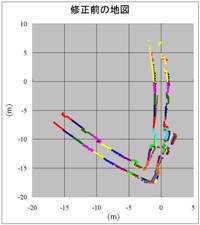 |
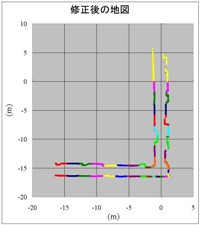 |
| 修正前の地図 | 修正後の地図 |
Masashi Awai, Atsushi Yamashita, Takahito Shimizu, Toru Kaneko, Yuichi Kobayashi and Hajime Asama: "Development of Mobile Robot System Equipped with Camera and Laser Range Finder Realizing HOG-Based Person Following and Autonomous Returning", Journal of Robotics and Mechatronics, Vol. 26, No. 1, pp. 68-77, February 2014. [doi:10.20965/jrm.2014.p0068]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "RGB-D SLAM Using Vanishing Point and Door Plate Information in Corridor Environment", Intelligent Service Robotics, Vol. 8, No. 2, pp. 105-114, April 2015. [doi:10.1007/s11370-015-0166-1] [PDF]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama, “Indoor Positioning System Based on Camera Sensor Network for Mobile Robot Localization in Indoor Environment”, Journal of Institute of Control, Robotics and Systems, Vol. 22, No. 11, pp. 952-959, November 2016, (in Korean). [doi:10.5302/J.ICROS.2016.16.0079]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Automatic Calibration of Camera Sensor Networks Based on 3D Texture Map Information", Robotics and Autonomous Systems, Vol. 87, pp. 313-328, January 2017. [doi:10.1016/j.robot.2016.09.015]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Automatic Calibration and Trajectory Reconstruction of Mobile Robot in Camera Sensor Network", Proceedings of the 11th Annual IEEE International Conference on Automation Science and Engineering (CASE2015), pp. 206-211, Gothenburg (Sweden), August 2015. [PDF]
池 勇勳, 山下 淳, 梅田 和昇, 淺間 一: "人工物環境における直線情報を用いたカメラの外部パラメータ推定法", 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2018), pp. 2598-2600, 大阪, December 2018. (SI2018優秀講演賞 受賞)
朝倉 弘崇(指導学生 修士2年), 精密工学会画像応用技術専門委員会・映像情報メディア学会メディア工学研究会委員会 合同サマーセミナー2004 優秀発表賞 受賞, 2004年8月20日. [賞状]
池 勇勳(指導学生 博士2年), 2014年度計測自動制御学会学術奨励賞研究奨励賞 受賞, 2015年2月20日. [賞状] [賞状と楯]
Yonghoon Ji, Atsushi Yamashita and Hajime Asama: "Automatic Camera Pose Estimation Based on Textured 3D Map Information", 6th International Conference on Advanced Mechatronics (ICAM2015), ICAM2015 Honorable Mention 受賞, 2015年12月08日. [賞状]
池 勇勳, 山下 淳, 梅田 和昇, 淺間 一: "人工物環境における直線情報を用いたカメラの外部パラメータ推定法", 第19回計測自動制御学会システムインテグレーション部門講演会(SI2018), SI2018優秀講演賞 受賞, 2019年03月05日. [賞状]
 |
 |
 |
 |
| サマーセミナー2004 優秀発表賞 |
計測自動制御学会 学術奨励賞研究奨励賞 |
ICAM2015 Honorable Mention | SI2018優秀講演賞 |
 |
 |
 |
 |
| 池 勇勳 Yonghoon Ji 東京大学 2013.4-2016.3博士 2016.3博士取得 2016.4-2018.3 学振特別研究員 |
河野 通隆 Michitaka Kawano 東京大学 2013.4-2014.3学部 |
粟井 真志 Masashi Awai 静岡大学 2010.4-2011.3学部 2011.4-2013.3修士 |
清水 隆史 Takahito Shimizu 静岡大学 2009.4-2010.3学部 2010.4-2012.3修士 |
 |
 |
 |
|
| 大内 隆史 Takafumi Ouchi 静岡大学 2009.4-2010.3学部 2010.4-2012.3修士 |
中本 琢実 Takumi Nakamoto 静岡大学 2004.4-2005.3学部 2005.4-2007.3修士 |
朝倉 弘崇 Hirotaka Asakura 静岡大学 2002.4-2003.3学部 2003.4-2005.3修士 |
 |
 |
 |
| 左クローラ故障 | アームを用いた前進行動 |
Hitoshi Kono, Musab Obaid Alhammadi, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Distributed Cooperative Fault Diagnosis Method for Internal Components of Robot Systems", International Journal of Intelligent Systems and Applications in Robotics, Vol. 8, No. 1, pp. 1-11, April 2017. [Link]
Hitoshi Kono, Tsuyoshi Suzuki, Akiya Kamimura, Kohji Tomita, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Automatic Convergence Estimation by Utilizing Fractal Dimensional Analysis for Reinforcement Learning", Journal of Instrumentation, Automation and Systems, Vol. 3, No. 3, pp. 58-70, September 2016. [doi:10.21535/jias.v3i3.934]
Tasuku Ito, Hitoshi Kono, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Recovery Motion Learning for Arm Mounted Mobile Crawler Robot in Drive System's Failure", Preprints of the 20th World Congress of the International Federation of Automatic Control, pp. 2365-2370, Toulouse (France), July 2017. [PDF]
Xiaojun Lu, Angela Faragasso, Yonghoon Ji, Hitoshi Kono, Atsushi Yamashita and Hajime Asama: "Multi-localization Methods for Fault Diagnosis in Autonomous Mobile Robots Systems", Proceedings of the 2017 IEEE International Conference on Real-time Computing and Robotics (RCAR2017), pp. 200-205, Okinawa (Japan), July 2017. [PDF]
河野 仁, 田村 雄介, 山下 淳, 淺間 一: "ロボットシステム内電装系のための分散協調型故障診断システム", 第16回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2015), pp. 2195-2198, 名古屋, December 2015.(SI2015優秀講演賞 受賞) [PDF]
伊藤 翼, 河野 仁, 田村 雄介, 山下 淳, 淺間 一: "アーム搭載移動ロボットの駆動系故障時のための強化学習を用いたリカバリモーション獲得", 第22回ロボティクスシンポジア講演予稿集, pp. 91-96, 群馬, March 2017.(査読付) [PDF]
河野 仁, 田村 雄介, 山下 淳, 淺間 一: "ロボットシステム内電装系のための分散協調型故障診断システム", 第16回計測自動制御学会システムインテグレーション部門講演会講演論文集(SI2015), SI2015優秀講演賞, 2015年12月16日. [賞状]
 |
| SI2015優秀講演賞 |
|
 |
 |
| 杉本 賢勇 Takao Sugimoto 東京大学 2016.4-2017.3学部 2017.4-2019.3修士 |
陸 小軍 Xiaojun Lu 東京大学 2016.9-2021.9博士 2021.10-研究生 |
伊藤 翼 Tasuku Ito 東京大学 2016.4-2017.3学部 |
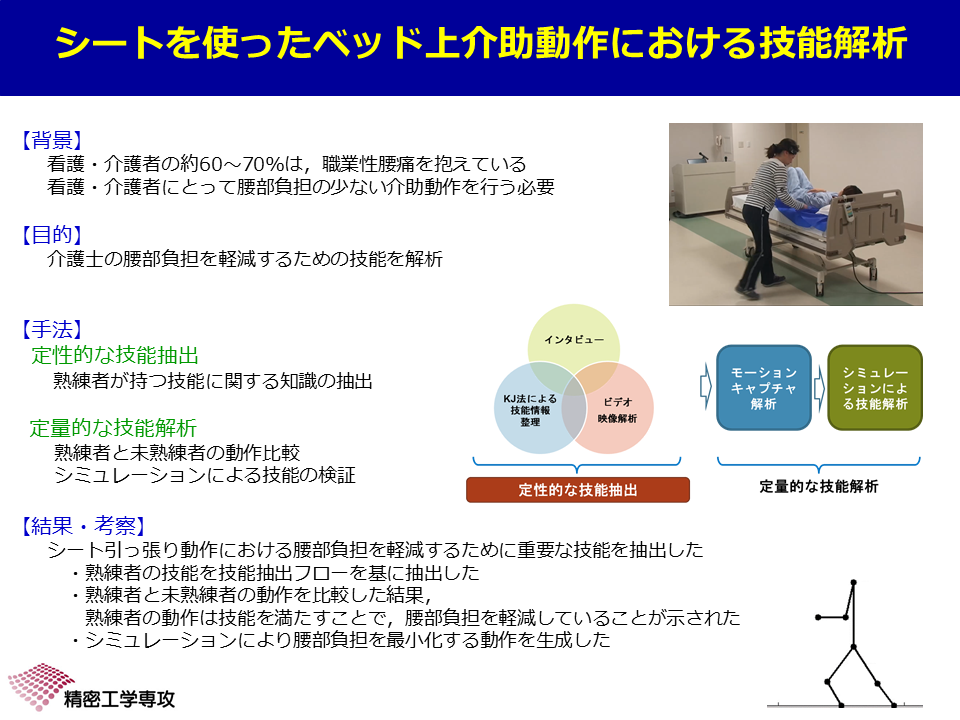 |
 |
 |
 |
|
| 動作の計測 | 筋肉の動き | 可視化 |
Qi An, 柳井 香史朗, 中川 純希, 温 文, 山川 博司, 山下 淳, 淺間 一: "実映像と筋活動の重畳表示によるローイング動作教育システム", 日本機械学会論文集, Vol. 82, No. 834, 15-00424, pp. 1-11, February 2016. [doi:10.1299/transjsme.15-00424] [PDF]
Qi An, Junki Nakagawa, Junko Yasuda,Wen Wen, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Aasama: "Skill Extraction from Nursing Care Service using Sliding Sheet", International Journal of Automation Technology, Vol. 12, No. 4, pp. 533-541, July 2018. [doi:10.20965/ijat.2018.p0533]
Qi An, Yuki Ishikawa,Wen Wen, Shu Ishiguro, Koji Ohata, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama: "Skill Abstraction of Physical Therapist in Hemiplegia Patients Rehabilitation Using A Walking Assist Robot", International Journal of Automation Technology, Vol. 13, No. 2, pp. 271-278, March 2019. [doi:10.20965/ijat.2019.p0271]
Koshiro Yanai, Qi An, Yuki Ishikawa, Junki Nakagawa, Wen Wen, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: "Visualization of Muscle Activity during Squat Motion for Skill Education", Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp. 86-90, Yokohama (Japan), September 2014. [PDF]
Junki Nakagawa, Qi An, Yuki Ishikawa, Koshiro Yanai, Wen Wen, Hiroshi Yamakawa, Junko Yasuda, Atsushi Yamashita and Hajime Asama: "Extraction and Evaluation of Proficiency in Bed Care Motion for Education Service of Nursing Skill", Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp. 91-96, Yokohama (Japan), September 2014. [PDF]
 |
 |
 |
|
| 菊地 諒 Ryo Kikuchi 東京大学 2014.4-2016.3修士 |
中村 祐基 Yuki Nakamura 東京大学 2014.4-2016.3修士 |
柳井 香史朗 Koushirou Yanai 東京大学 2013.4-2015.3修士 |
中川 純希 Junki Nakagawa 東京大学 2012.4-2013.3学部 2013.4-2015.3修士 |
 |
 |
 |
|
| 初号機ロボット | 2号機ロボット | 動作の様子 |
Atsushi Yamashita, Masaaki Kitaoka and Toru Kaneko: "Motion Planning of Biped Robot Equipped with Stereo Camera Using Grid Map", International Journal of Automation Technology, Vol. 5, No. 5, pp. 639-647, September 2011. [doi:10.20965/ijat.2011.p0639] [PDF]
Masaaki Kitaoka, Atsushi Yamashita and Toru Kaneko: "Obstacle Avoidance and Path Planning Using Color Information for a Biped Robot Equipped with a Stereo Camera System", Proceedings of the 4th Asia International Symposium on Mechatronics (AISM2010), pp. 38-43, Singapore (Singapore), December 2010. (AISM2010 Best Paper Award) [PDF]
喜多岡 雅明, 山下 淳, 金子 透: "ステレオカメラ搭載二足歩行ロボットの色情報を用いた障害物回避・経路計画", 電気学会研究会資料(一般産業研究会GID-09-01~24), GID-09-12, pp. 59-64, 徳島, December 2009. [PDF]
Masaaki Kitaoka, Atsushi Yamashita and Toru Kaneko: Asia International Symposium on Mechatronics, AISM2010 Best Paper Award 受賞, 2010年12月17日. [賞状]
 |
| AISM2010 Best Paper Award |
 |
 |
| 喜多岡 雅明 Masaaki Kitaoka 静岡大学 2008.4-2009.3学部 2009.4-2011.3修士 |
町田 直人 Naoto Machida 静岡大学 2010.4-2011.3学部 |
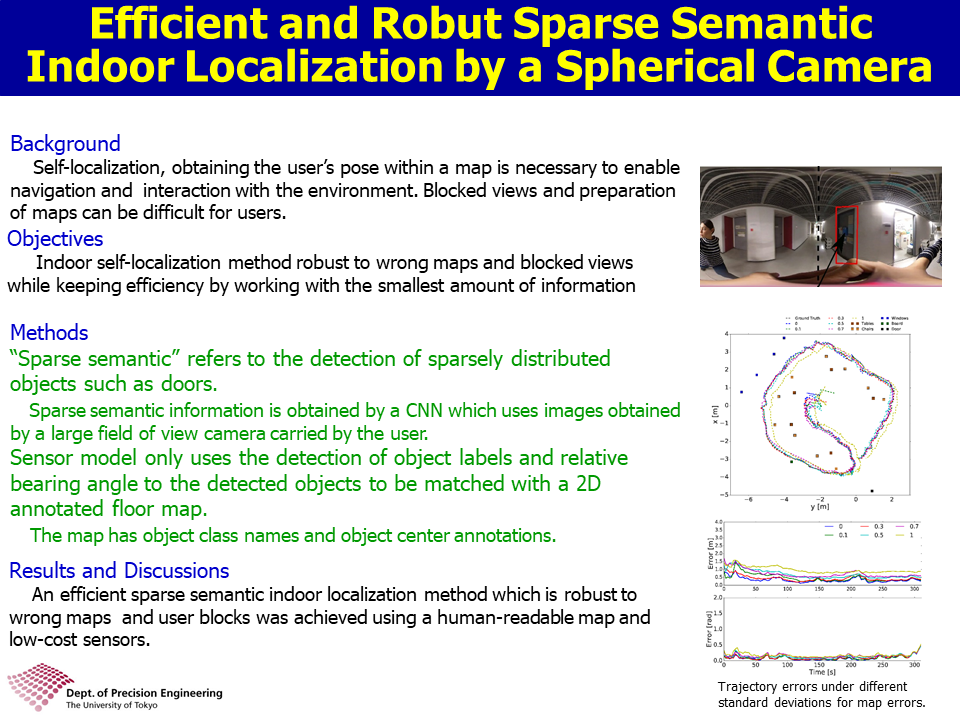 |
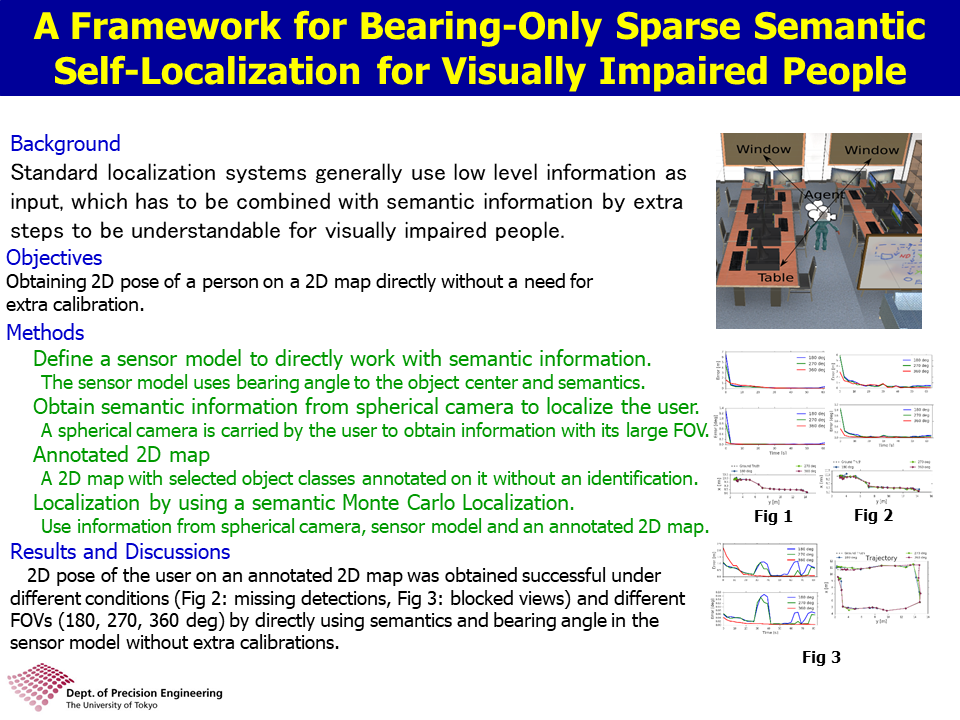 |
 |
 |
| ウェアラブルビジョンシステム | タッチパネル上での誘導 |
久野 素有, 山下 淳, 金子 透: "ステレオカメラを用いたタッチパネル操作支援システムの構築", 電気学会論文誌D, Vol. 131, No. 4, pp. 458-465, April 2011. [doi:10.1541/ieejias.131.458] [PDF]
宮木 理恵, 山下 淳, 金子 透: "プロジェクタ・カメラシステムを用いた色覚障碍者への色情報提示", 電気学会論文誌D, Vol. 131, No. 4, pp. 497-504, April 2011. [doi:10.1541/ieejias.131.497] [PDF]
Daiki Kawakami, Kaito Makino, Yuichi Kobayashi, Toru Kaneko, Atsushi Yamashita and Hajime Asama: "Projector Camera System Presenting Color Information for the Color Vision Deficient", Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol. 20, No. 1, pp. 26-32, January 2016. [doi:10.20965/jaciii.2016.p0026]
Irem Uygur, Renato Miyagusuku, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Robust and Efficient Indoor Localization Using Sparse Semantic Information by a Spherical Camera", Sensors, Vol. 20, No. 15, 4128, pp. 1-20, August 2020. [doi:doi:10.3390/s20154128]
Atsushi Yamashita, Rie Miyaki and Toru Kaneko: "Color Information Presentation for Color Vision Defective by Using a Projector Camera System", Proceedings of the ACCV2010 Workshop on Application of Computer Vision for Mixed and Augmented Reality, Queenstown (New Zealand), November 2010. [doi:10.1007/978-3-642-22819-3_10] [PDF]
Atsushi Yamashita, So Kuno and Toru Kaneko: "Assisting System of Visually Impaired in Touch Panel Operation Using Stereo Camera", Proceedings of the 2011 IEEE International Conference on Image Processing (ICIP2011), pp. 1001-1004, Brussels (Belgium), September 2011. [doi:10.1109/ICIP.2011.6116728] [PDF] [bibtex]
Irem Uygur, Renato Miyagusuku, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People", Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII2019), pp. 319-324, Paris (France), January 2019. [doi:10.1109/SII.2019.8700370] [PDF]
Sarthak Pathak, Irem Uygur, Shize Lin, Renato Miyagusuku, Alessandro Moro, Atsushi Yamashita and Hajime Asama: "Localization in a Semantic Map via Bounding Box Information and Feature Points", Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII2021), pp. 126-131, January 2021. [doi:10.1109/IEEECONF49454.2021.9382719] [PDF]
 |
 |
 |
 |
 |
| 林 世泽 Shize Lin 東京大学 2019.7-2019.9 交換留学生(清華大学) |
Irem Uygur 東京大学 2017.9-2021.9博士 2021.9博士取得 |
川上 大樹 Daiki Kawakami 静岡大学 2011.4-2012.3学部 2012.4-2014.3修士 |
渡邉 賢 Ken Watanabe 静岡大学 2010.4-2011.3学部 |
久野 素有 So Kuno 静岡大学 2009.4-2010.3学部 2010.4-2012.3修士 |
 |
 |
 |
||
| 宮木 理恵 Rie Miyaki 静岡大学 2008.4-2009.3学部 2009.4-2011.3修士 |
大西 由純 Yoshitsuna Onishi 静岡大学 2008.4-2009.3学部 |
奥脇 宏行 Hiroyuki Okuwaki 静岡大学 2004.4-2005.3学部 |
Stefano Massaroli, Federico Califano, Angela Faragasso, Atsushi Yamashita and Hajime Asama: "On the Extinction-Free Stabilization of Predator-Prey Dynamics", IEEE Control Systems Letters, Vol. 4, No. 4, pp. 964-969, October 2020. [doi:10.1109/LCSYS.2020.2997741]
Daisuke Uchida, Atsushi Yamashita and Hajime Asama: "Data-Driven Koopman Controller Synthesis Based on the Extended H2 Norm Characterization", IEEE Control Systems Letters, Vol. 5, No. 5, pp. 1795-1800, November 2021. [doi:10.1109/LCSYS.2020.3042827]
Stefano Massaroli, Michael Poli, Stefano Peluchetti, Jinkyoo Park, Atsushi Yamashita and Hajime Asama: "Learning Stochastic Optimal Policies via Gradient Descent", IEEE Control Systems Letters, Vol. 6, pp. 1094-1099, 2022. [doi:10.1109/LCSYS.2021.3086672]
Stefano Massaroli, Federico Califano, Angela Faragasso, Atsushi Yamashita and Hajime Asama: "Iterative Energy Shaping of a Ball-Dribbling Robot", Preprints of the 1st IFAC Workshop on Robot Control (WROCO2019), pp. 248-253, Daejeon (Korea), September 2019. (Young Author Award) [PDF]
Stefano Massaroli, Michael Poli, Federico Califano, Angela Faragasso, Jinkyoo Park, Atsushi Yamashita and Hajime Asama: "Port-Hamiltonian Approach to Neural Network Training", Proceedings of the 2019 IEEE Conference on Decision and Control (CDC2019), pp. 6799-6806, Nice (France), December 2019.
Stefano Massaroli, Michael Poli, Sanzhar Bakhtiyarov, Jinkyoo Park, Atsushi Yamashita and Hajime Asama: "Neural Ordinary Differential Equation Value Networks for Parametrized Action Spaces", Eighth International Conference on Learning Representations (ICLR2020) Workshop on Integration of Deep Neural Models and Differential Equations, Addis Ababa (Ethiopia), April 2020.
Michael Poli, Stefano Massaroli, Atsushi Yamashita, Hajime Asama and Jinkyoo Park: "Port-Hamiltonian Gradient Flows", Eighth International Conference on Learning Representations (ICLR2020) Workshop on Integration of Deep Neural Models and Differential Equations, Addis Ababa (Ethiopia), April 2020.
Stefano Massaroli, Michael Poli, Jinkyoo Park, Atsushi Yamashita and Hajime Asama: "Dissecting Neural ODEs", Advances in Neural Information Processing Systems 33 (NeurIPS2020), December 2020. (Accepted for Oral Presentation, 105/9454 = 1%) [Link] [PDF]
Michael Poli, Stefano Massaroli, Atsushi Yamashita, Hajime Asama and Jinkyoo Park: "Hypersolvers: Toward Fast Continuous-Depth Models", Advances in Neural Information Processing Systems 33 (NeurIPS2020), December 2020. (Acceptance ratio: 1900/9454 = 20%) [Link] [PDF]
Stefano Massaroli, Michael Poli, Sho Sonoda, Taiji Suzuki, Jinkyoo Park, Atsushi Yamashita and Hajime Asama: "Differentiable Multiple Shooting Layers", Advances in Neural Information Processing Systems 34 (NeurIPS2021), December 2021.
Michael Poli, Stefano Massaroli, Luca Scimeca, Sanghyuk Chun, Seong Joon Oh, Atsushi Yamashita, Hajime Asama, Jinkyoo Park and Animesh Garg: "Neural Hybrid Automata: Learning Dynamics with Multiple Modes and Stochastic Transitions", Advances in Neural Information Processing Systems 34 (NeurIPS2021), December 2021.
Stefano Massaroli(指導学生 博士1年), 1st IFAC Workshop on Robot Control, WROCO2019 Young Author Award 受賞, 2019年09月20日. [賞状]
 |
| WROCO2019 Young Author Award |
 |
 |
 |
 |
| 圓道 和奏 Wakana Endo 東京大学 2021.4-2023.3修士 |
李 相赫 Sanghyuk Lee 東京大学 2021.4-2023.3修士 |
内田 大介 Daisuke Uchida 東京大学 2019.4-2021.3修士 2021.4-2024.3博士 |
Stefano Massaroli 東京大学 2017.9-2019.9修士 2019.9-2022.3博士 |
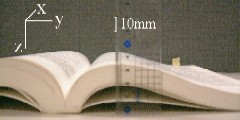 |
 |
| 分厚い書籍 | 歪んだ画像(補正前) |
 |
 |
| 形状計測結果 | 補正画像 |
川原子 淳, 山下 淳, 金子 透, 三浦 憲二郎: "ステレオビジョンシステムによる表面湾曲書籍の文字認識", 映像情報メディア学会誌, Vol. 56, No. 5, pp. 858-862, May 2002. [doi:10.3169/itej.56.858] [PDF]
Atsushi Yamashita, Atsushi Kawarago, Toru Kaneko and Kenjiro T. Miura: "Shape Reconstruction and Image Restoration for Non-Flat Surfaces of Documents with a Stereo Vision System", Proceedings of the 17th International Conference on Pattern Recognition (ICPR2004), Vol. 1, pp. 482-485, Cambridge (UK), August 2004. [doi:10.1109/ICPR.2004.1334171] [PDF] [bibtex]
Yusuke Suzuki, Atsushi Yamashita and Toru Kaneko: "Correction of Geometric and Photometric Distortion of Document Images Using a Stereo Camera System", Proceedings of IAPR Conference on Machine Vision Applications (MVA2007), pp. 215-218, Tokyo (Japan), May 2007. [PDF]
鈴木 優輔, 田中 友, 山下 淳, 金子 透: "ステレオカメラで取得した書籍画像の歪み・陰影補正", 画像の認識・理解シンポジウム2006(MIRU2006)論文集, pp. 1174-1179, 仙台, July 2006. [PDF]
鈴木 優輔(指導学生 修士1年), 精密工学会画像応用技術専門委員会・映像情報メディア学会メディア工学研究会委員会 合同サマーセミナー2006 優秀発表賞 受賞, 2006年9月1日. [賞状]
 |
| サマーセミナー2006 優秀発表賞 |
 |
 |
 |
 |
 |
| 大石 将太 Shota Oishi 静岡大学 2009.4-2010.3学部 2010.4-2012.3修士 |
三井 嘉弘 Yoshihiro Mitsui 静岡大学 2009.4-2010.3学部 |
秋本 廉太郎 Rentaro Akimoto 静岡大学 2008.4-2009.3学部 |
鈴木 優輔 Yusuke Suzuki 静岡大学 2005.4-2006.3学部 2006.4-2007.3修士 |
川原子 淳 Atsushi Kawarago 静岡大学 2000.4-2001.3学部 2001.4-2003.3修士 |
 |
 |
| 研究室メンバー全員の顔を検出 | 後ろを向いた人物の追跡 |
Atsushi Yamashita, Yu Ito, Toru Kaneko and Hajime Asama: "Human Tracking with Multiple Cameras Based on Face Detection and Mean Shift", Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO2011), pp. 1664-1671, Phuket Island (Thailand), December 2011. [doi:10.1109/ROBIO.2011.6181528] [PDF]
伊東 祐, 山下 淳, 金子 透: "Haar-like特徴とMean-Shiftトラッカによる複数視点人物監視システム", 第14回ロボティクスシンポジア講演予稿集, pp. 77-82, 登別, March 2009.(査読付) [PDF]
 |
 |
 |
| 伊東 祐 Yu Ito 静岡大学 2006.4-2007.3学部 2007.4-2009.3修士 |
竹内 大悟 Daigo Takeuchi 静岡大学 2008.4-2009.3学部 |
立花 智哉 Tomoya Tachibana 静岡大学 2006.4-2007.3学部 |
 |
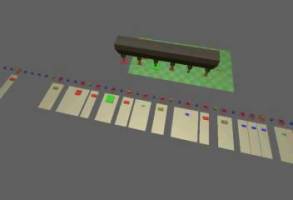 |
| プリント基板 | 吸着動作の最適化結果 |
Toru Tsuchiya, Atsushi Yamashita, Toru Kaneko, Yasuhiro Kaneko and Hirokatsu Muramatsu: "Scheduling Optimization of Component Mounting in Printed Circuit Board Assembly by Prioritizing Simultaneous Pickup", Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2007), pp. 2913-2918, San Diego (USA), November 2007. [doi:10.1109/IROS.2007.4399002] [PDF] [Video]
Toru Tsuchiya, Atsushi Yamashita, Toru Kaneko, Yasuhiro Kaneko and Hirokatsu Muramatsu: "Scheduling and Feeder Arrangement for Simultaneous Pickup in Printed Circuit Board Assembly of Placement Machines", Proceedings of the 3rd Asia International Symposium on Mechatronics (AISM2008), TP2-1(3), pp. 1-6, Sapporo (Japan), August 2008. [PDF]
土屋 亨, 山下 淳, 金子 透, 金子 康弘, 村松 啓且: "電子部品実装機械の同時吸着を優先したプリント基板組み立て順序最適化", 第13回ロボティクスシンポジア講演予稿集, pp. 295-300, 香川, March 2008.(査読付) [PDF]
土屋 亨, 山下 淳, 金子 透, 金子 康弘, 村松 啓且: "プリント基板短時間組み立てのための同時吸着に有利なスケジューリング", 第14回ロボティクスシンポジア講演予稿集, pp. 146-151, 登別, March 2009.(査読付) [PDF]
 |
 |
| 土屋 亨 Toru Tsuchiya 静岡大学 2006.4-2007.3学部 2007.4-2009.3修士 |
杉本 諭久 Toshihisa Sugimoto 静岡大学 2005.4-2006.3学部 |
 |
 |
 |
 |
 |
 |
単一色背景 | ストライプ状背景 | 市松模様背景 |
Atsushi Yamashita, Toru Kaneko, Shinya Matsushita and Kenjiro T. Miura: "Region Extraction with Chromakey Using Stripe Backgrounds", IEICE Transactions on Information and Systems, Vol. 87-D, No. 1, pp. 66-73, January 2004. [Link] [PDF]
Hiroki Agata, Atsushi Yamashita and Toru Kaneko: "Chroma Key Using a Checker Pattern Background", IEICE Transactions on Information and Systems, Vol. 90-D, No. 1, pp. 242-249, January 2007. [Link] [PDF]
山下 淳, 縣 弘樹, 金子 透: "動的輪郭モデルを用いたストライプ状クロマキー", 映像情報メディア学会誌, Vol. 61, No. 2, pp. 189-197, February 2007. [doi:10.3169/itej.61.189] [PDF]
Atsushi Yamashita, Hiroki Agata and Toru Kaneko: "Every Color Chromakey", Proceedings of the 19th International Conference on Pattern Recognition (ICPR2008), pp. 1-4, TuBCT9.40, Tampa (USA), December 2008. [doi:10.1109/ICPR.2008.4761643] [PDF] [bibtex]
 |
 |
| 映像情報メディア学会 研究奨励賞 |
浜松電子工学奨励会 高柳研究奨励賞 |
 |
 |
| 縣 弘樹 Hiroki Agata 静岡大学 2004.4-2005.3学部 2005.4-2007.3修士 |
櫻井 貴之 Takayuki Sakurai 静岡大学 2003.4-2004.3学部 |
 |
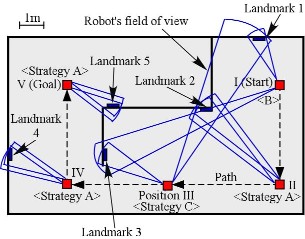 |
| ステレオカメラ付移動ロボット | ナビゲーション計画結果 |
Atsushi Yamashita, Kazutoshi Fujita, Toru Kaneko and Hajime Asama: "Path and Viewpoint Planning of Mobile Robots with Multiple Observation Strategies", Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2004), pp. 3195-3200, Sendai (Japan), October 2004. [doi:10.1109/IROS.2004.1389909] [PDF]
藤田 和俊, 朝倉 弘崇, 山下 淳, 金子 透, 三浦 憲二郎, 淺間 一: "複数観測戦略を有する自律移動ロボットのナビゲーション計画", 日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集(ROBOMEC2003), 2P2-1F-B2, pp. 1-2, 函館, May 2003. [PDF]
 |
 |
 |
| 栢分 光明 Mitsuaki Kayawake 静岡大学 2004.4-2005.3学部 2005.4-2007.3修士 |
藤田 和俊 Kazutoshi Fujita 静岡大学 2002.4-2004.3修士 |
石原 智明 Tomoaki Ishihara 静岡大学 2001.4-2002.3学部 |
 |
 |
| 管楽器の例 | FFT結果 |
 |
 |
| 佐竹 大祐 Daisuke Satake 静岡大学 2003.4-2004.3学部 |
詰石 健 Takeshi Tsumeishi 静岡大学 2003.4-2004.3学部 |
 |
 |
 |
 |
 |
 |
| 移動物体計測結果 |
Atsushi Yamashita, Toru Kaneko, Shinya Matsushita, Kenjiro T. Miura and Suekichi Isogai: "Camera Calibration and 3-D Measurement with an Active Stereo Vision System for Handling Moving Objects", Journal of Robotics and Mechatronics, Vol. 15, No. 3, pp. 304-313, June 2003. [doi:10.20965/jrm.2003.p0304] [PDF]
恒川 法和, 富田 文明, 山下 淳, 金子 透: "ステレオビジョンを用いた逐次的3次元モデルの生成", 精密工学会画像応用技術専門委員会サマーセミナーテキスト, Vol. 12, pp. 15-16, 浜松, July 2003. [PDF]
恒川 法和, 角 保志, 山下 淳, 金子 透, 富田 文明: "動物体の3次元境界線からの逐次的3次元幾何モデリング", 情報処理学会研究報告(2004-CVIM-143), Vol. 2004, No. 26, pp. 9-16, 東京, March 2004. [Link] [PDF]
 |
 |
 |
| 恒川 法和 Norikazu Tsunekawa 静岡大学 2001.4-2002.3学部 2002.4-2004.3修士 |
園原 猛史 Takeshi Sonohara 静岡大学 2001.4-2003.3修士 |
松下 信哉 Shinya Matsushita 静岡大学 2000.4-2002.3修士 |
 |
 |
 |
| 初号機ロボット | 2号機ロボット | 3号機ロボット |
Atsushi Yamashita, Tatsuya Kanazawa, Hajime Asama, Hayato Kaetsu, Isao Endo, Tamio Arai and Kazumi Sato: "Development of a Holonomic Omni-Directional Mobile Robot with Step-Climbing Ability", Journal of Robotics and Mechatronics, Vol. 13, No. 2, pp. 160-167, March 2001. [doi:10.20965/jrm.2001.p0160]
Atsushi Yamashita, Hajime Asama, Hayato Kaetsu, Isao Endo and Tamio Arai: "Development of Omni-Directional and Step-Climbing Mobile Robot", Proceedings of the 3rd International Conference on Field and Service Robotics (FSR2001), pp. 327-332, Espoo (Finland), June 2001. [PDF]
金沢 竜也, 山下 淳, 淺間 一, 嘉悦 早人, 遠藤 勲, 新井 民夫, 佐藤 一省: "段差乗り越え能力を有する全方向移動ロボットの開発", 第17回日本ロボット学会学術講演会予稿集(RSJ1999), pp. 913-914, 平塚, September 1999. [PDF]
金沢 竜也, 山下 淳, 淺間 一, 嘉悦 早人, 遠藤 勲, 新井 民夫, 佐藤 一省: "段差適応型全方向移動ロボットの開発", 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集(ROBOMEC2000), 2P1-44-071, pp. 1-2, 熊本, May 2000.(優秀講演にノミネーション) [PDF]
山下 淳, 金沢 竜也, 淺間 一, 嘉悦 早人, 川端 邦明, 遠藤 勲, 新井 民夫, 佐藤 一省: "自律型段差適応ホロノミック全方向移動ロボットの開発", 第18回日本ロボット学会学術講演会予稿集(RSJ2000), pp. 1153-1154, 草津, September 2000. [PDF]
 |
| 金沢 竜也 Tatsuya Kanazawa 東京理科大学 |
 |
 |
| 協調物体搬送計画結果 | 全方向移動ロボット |
山下 淳, 福地 正樹, 太田 順, 新井 民夫, 淺間 一: "移動ロボット群による大型物体搬送計画", 日本機械学会論文集(C編), Vol. 68, No. 665, pp. 165-172, January 2002. [doi:10.1299/kikaic.68.165] [PDF]
Atsushi Yamashita, Tamio Arai, Jun Ota and Hajime Asama: "Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation", IEEE Transactions on Robotics and Automation, Vol. 19, No. 2, pp. 223-237, April 2003. [doi:10.1109/TRA.2003.809592] [PDF] [bibtex]
Atsushi Yamashita, Masaki Fukuchi, Jun Ota, Tamio Arai and Hajime Asama: "Motion Planning for Cooperative Transportation of a Large Object by Multiple Mobile Robots in a 3D Environment", Proceedings of the 2000 IEEE International Conference on Robotics and Automation (ICRA2000), pp. 3144-3151, San Francisco (USA), April 2000. [doi:10.1109/ROBOT.2000.845147] [PDF] [bibtex]
福地 正樹, 山下 淳, 河野 功, 太田 順, 新井 民夫: "3次元環境下での持ち替え動作を伴う複数移動ロボットによる物体搬送経路計画", 日本機械学会ロボティクス・メカトロニクス講演会'99講演論文集(ROBOMEC1999), 1P1-30-035, pp. 1-2, 東京, June 1999. [PDF]
福地 正樹, 山下 淳, 太田 順, 新井 民夫: "三次元環境における複数移動ロボットによる搬送計画(第2報:近似セル分解とポテンシャルを用いた大域的経路計画)", 第17回日本ロボット学会学術講演会予稿集(RSJ1999), pp. 1027-1028, 平塚, September 1999.
山下 淳, 総合研究奨励会 石井学術奨励賞 受賞, 2001年3月29日. [賞状]
 |
| 総合研究奨励会 石井学術奨励賞 |
 |
| 福地 正樹 Masaki Fukuchi 東京大学 1998.4-2000.3修士 |
 |
 |
 |
 |
 |
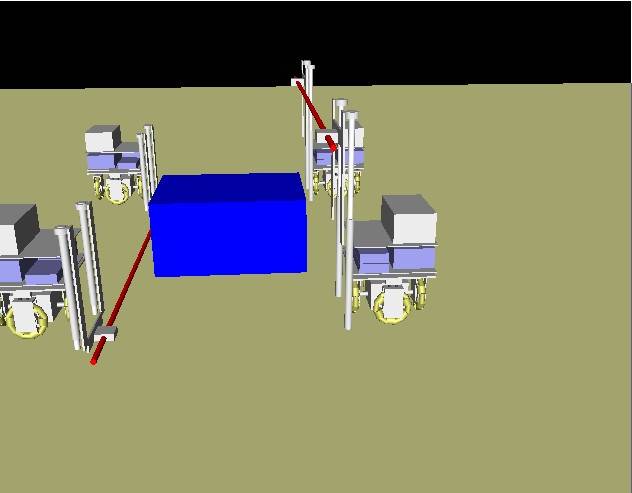 |
| 協調物体操作計画結果 |
山下 淳, 太田 順, 河野 功, 福地 正樹, 新井 民夫, 淺間 一: "複数移動ロボットによる協調物体操作計画", 電気学会論文誌C, Vol. 121, No. 3, pp. 549-556, March 2001. [doi:10.1541/ieejeiss1987.121.3_549] [PDF]
Atsushi Yamashita, Tamio Arai, Jun Ota and Hajime Asama: "Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation", IEEE Transactions on Robotics and Automation, Vol. 19, No. 2, pp. 223-237, April 2003. [doi:10.1109/TRA.2003.809592] [PDF] [bibtex]
Atsushi Yamashita, Kou Kawano, Jun Ota, Tamio Arai, Masaki Fukuchi, Jun Sasaki and Yasumichi Aiyama: "Planning Method for Cooperative Manipulation by Multiple Mobile Robots using Tools with Motion Errors", Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS1999), pp. 978-983, Kyongju (Korea), October 1999. [doi:10.1109/IROS.1999.812807] [PDF]
山下 淳, 河野 功, 福地 正樹, 相山 康道, 太田 順, 新井 民夫: "棒を用いた複数移動ロボットによる誤差を考慮した物体協調操作計画", 日本機械学会ロボティクス・メカトロニクス講演会'99講演論文集(ROBOMEC1999), 1P1-30-034, pp. 1-2, 東京, June 1999. [PDF]
山下 淳, 福地 正樹, 太田 順, 新井 民夫: "三次元環境における複数移動ロボットによる搬送計画(第1報:誤差に対してロバストな物体操作計画)", 第17回日本ロボット学会学術講演会予稿集(RSJ1999), pp. 1025-1026, 平塚, September 1999. [PDF]
 |
| 河野 功 Kou Kawano 東京大学 1998.4-1999.3学部 |
 |
 |
 |
| 移動ロボットの概観 | 棒を用いた整頓作業の様子 | 紐を用いた仕分け作業の様子 |
Atsushi Yamashita, Jun Sasaki, Jun Ota and Tamio Arai: "Cooperative Manipulation of Objects by Multiple Mobile Robots with Tools", Proceedings of the 4th Japan-France / 2nd Asia-Europe Congress on Mechatronics (JFM1998), pp. 310-315, Kitakyushuu (Japan), October 1998. [PDF]
山下 淳, 佐々木 順, 相山 康道, 太田 順, 新井 民夫: "道具を用いた複数移動ロボットの協調による物体搬送", 日本機械学会ロボティクス・メカトロニクス講演会'98講演論文集(ROBOMEC1998), 2CIII3-1, pp. 1-2, 仙台, June 1998. [PDF]
 |
 |
| 移動ロボットの概観 | 協調搬送の様子 |
太田 順, 宮田 なつき, 佐々木 順, 吉田 英一, 倉林 大輔, 山下 淳, 新井 民夫: "複数の移動ロボットの協調による搬送作業の実現(第5報:センシングエリアを考慮した群れ作り搬送の実現)", 第13回日本ロボット学会学術講演会予稿集(RSJ1995), pp. 863-864, 川崎, November 1995.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}